基于电子围栏的车辆定位方法及装置与流程
1.本发明涉及车辆定位技术领域,尤其涉及一种基于电子围栏的车 辆定位方法及装置。
背景技术:
2.近年来,随着环保意识加强,市场上出现了越来越多的共享车辆, 随着共享车辆的推广,使用共享车辆的人数不断增加。为了能够对共 享车辆进行有序管理,电子围栏应运而生,基于电子围栏与共享车辆 的相对位置关系,可以判定共享车辆是否存在乱停乱放等现象。
3.目前,多通过gps定位点来确定共享车辆与电子围栏的相对位 置关系,但由于gps定位点存在漂移误差,从而无法准确基于gps 定位判断共享车辆与电子围栏的相对位置关系。
技术实现要素:
4.本发明提供一种基于电子围栏的车辆定位方法及装置,用以解决 现有技术中无法准确确定车辆与电子围栏的位置关系的缺陷。
5.本发明提供一种基于电子围栏的车辆定位方法,包括:
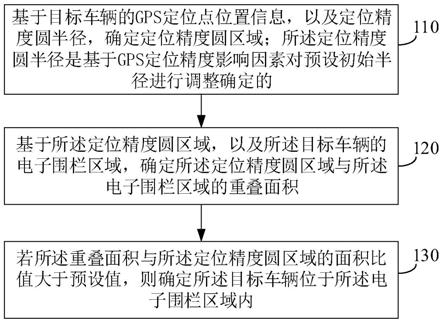
6.基于目标车辆的gps定位点位置信息,以及定位精度圆半径, 确定定位精度圆区域;所述定位精度圆半径是基于gps定位精度影 响因素对预设初始半径进行调整确定的;
7.基于所述定位精度圆区域,以及所述目标车辆的电子围栏区域, 确定所述定位精度圆区域与所述电子围栏区域的重叠面积;
8.若所述重叠面积与所述定位精度圆区域的面积比值大于预设值, 则确定所述目标车辆位于所述电子围栏区域内。
9.根据本发明提供的一种基于电子围栏的车辆定位方法,
10.根据本发明提供的一种基于电子围栏的车辆定位方法,所述定位 精度圆半径是基于如下步骤确定的:
11.基于所述电子围栏,确定预设初始半径;
12.基于所述gps定位精度影响因素,确定所述gps定位点位置信 息的误差,并基于所述gps定位点位置信息的误差调整所述预设初 始半径,得到所述定位精度圆半径;所述误差影响因素包括gps误 差参数、所述目标车辆的历史定位准确率以及所述电子围栏的历史定 位准确率中的至少一种。
13.根据本发明提供的一种基于电子围栏的车辆定位方法,所述基于 所述gps定位精度影响因素,确定所述gps定位点位置信息的误差, 包括:
14.基于所述gps误差参数以及所述gps误差参数的阈值区间,确 定所述gps定位点位置信息的误差;
15.若所述目标车辆的历史定位准确率小于第一阈值,则基于所述目 标车辆的历史
定位准确率以及所述第一阈值,确定所述gps定位点 位置信息的误差;
16.若所述电子围栏的历史定位准确率小于第二阈值,则基于所述目 标车辆的历史定位准确率以及所述第二阈值,确定所述gps定位点 位置信息的误差。
17.根据本发明提供的一种基于电子围栏的车辆定位方法,所述基于 目标车辆的gps定位点位置信息,以及定位精度圆半径,确定定位 精度圆区域,之前还包括:
18.获取预设时段内所述目标车辆的若干个gps定位点初始位置信 息,并基于各初始位置信息确定所述目标车辆的gps运动状态;
19.若所述gps运动状态与所述目标车辆的实际运动状态一致,则 将对应的初始位置信息作为所述目标车辆的gps定位点位置信息; 所述实际运动状态是基于所述预设时段内所述目标车辆的运动参数 确定的。
20.根据本发明提供的一种基于电子围栏的车辆定位方法,所述运动 参数包括所述目标车辆的车轮的角速度、所述目标车辆的速度以及所 述目标车辆的加速度中的至少一种。
21.根据本发明提供的一种基于电子围栏的车辆定位方法,还包括:
22.若所述重叠面积与所述定位精度圆区域的面积比值小于所述预 设值,则确定所述目标车辆位于所述电子围栏区域外;
23.若所述重叠面积与所述定位精度圆区域的面积比值等于所述预 设值,则确定所述目标车辆位于所述电子围栏区域的围栏边上。
24.根据本发明提供的一种基于电子围栏的车辆定位方法,所述gps 定位点位置信息是基于所述目标车辆对应的用户终端发送的用户位 置信息和/或所述目标车辆的gps定位模块得到的gps定位信息确定 的。
25.本发明还提供一种基于电子围栏的车辆定位装置,包括:
26.精度圆确定单元,用于基于目标车辆的gps定位点位置信息, 以及定位精度圆半径,确定定位精度圆区域;所述定位精度圆半径是 基于gps定位精度影响因素对预设初始半径进行调整确定的;
27.重叠面积确定单元,用于基于所述定位精度圆区域,以及所述目 标车辆的电子围栏区域,确定所述定位精度圆区域与所述电子围栏区 域的重叠面积;
28.车辆定位单元,用于若所述重叠面积与所述定位精度圆区域的面 积比值大于预设值,则确定所述目标车辆位于所述电子围栏区域内。
29.本发明还提供一种电子设备,包括存储器、处理器及存储在所述 存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所 述计算机程序时实现如上述任一种所述基于电子围栏的车辆定位方 法的步骤。
30.本发明还提供一种非暂态计算机可读存储介质,其上存储有计算 机程序,所述计算机程序被处理器执行时实现如上述任一种所述基于 电子围栏的车辆定位方法的步骤。
31.本发明提供的基于电子围栏的车辆定位方法及装置,结合gps 定位精度影响因素确定定位精度圆区域,从而能够准确基于定位精度 圆区域与电子围栏区域的重叠面积与定位精度圆区域的面积比值,确 定目标车辆是否位于电子围栏区域内,避免传统方法中gps定位点 存在漂移误差导致无法准确判断共享车辆与电子围栏的相对位置关 系的问题。
附图说明
32.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实 施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见 地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术 人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得 其他的附图。
33.图1是本发明提供的基于电子围栏的车辆定位方法的流程示意 图;
34.图2是本发明提供的基于电子围栏的车辆定位装置的结构示意 图;
35.图3是本发明提供的电子设备的结构示意图。
具体实施方式
36.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发 明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然, 所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于 本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提 下所获得的所有其他实施例,都属于本发明保护的范围。
37.基于电子围栏与共享车辆的相对位置关系,可以判定共享车辆是 否存在乱停乱放等现象。目前,多通过gps定位点来确定共享车辆 与电子围栏的相对位置关系,但由于gps定位点存在漂移误差,从 而无法准确基于gps定位判断共享车辆与电子围栏的相对位置关系。 例如,gps定位显示共享车辆a在电子围栏内,但由于gps定位点 存在漂移误差,实际上共享车辆a已离开电子围栏区域。
38.对此,本发明提供一种基于电子围栏的车辆定位方法。图1是本 发明提供的基于电子围栏的车辆定位方法的流程示意图,如图1所示, 该方法包括如下步骤:
39.步骤110、基于目标车辆的gps定位点位置信息,以及定位精度 圆半径,确定定位精度圆区域;定位精度圆半径是基于gps定位精 度影响因素对预设初始半径进行调整确定的。
40.具体地,预设初始半径可以是根据不同站点的实际情况预设的, 定位精度圆半径是根据不同站点的gps定位精度影响因素(如gps 误差参数)动态调整预设初始半径得到的,也可以是根据不同站点情 况设置不同的定位精度圆半径,本发明实施例对此不作具体限定。其 中,gps定位精度影响因素是指影响目标车辆gps定位精度的要素, 如gps误差参数、历史定位准确率等。
41.由于gps定位点位置信息中包含目标车辆gps位置信息,从而 在确定定位精度圆半径后,以目标车辆gps位置作为圆心,以定位 精度圆半径作为半径,可以确定一个圆形区域,即定位精度圆区域。
42.步骤120、基于定位精度圆区域,以及目标车辆的电子围栏区域, 确定定位精度圆区域与电子围栏区域的重叠面积。
43.具体地,电子围栏就是借助gps定位管理后台设定个区域,建 立一个围栏式警戒区域。当车辆进入或离开电子围栏区域时,就会发 送告警消息到平台上。因此,电子围栏可以应用于共享车辆,基于电 子围栏与共享车辆的相对位置关系,可以判定共享车辆是否存在乱停 乱放等现象。其中,电子围栏区域可以设成标准状,如圆形、矩形; 还可以设成其它不规律形状。
44.例如,在进行还车时,若判断共享车辆位于电子围栏外,则系统 可以提示该共享车辆未停放在目标区域,不允许还车,从而可以使得 共享车辆停放在规定的电子围栏区域内。
45.在确定定位精度圆区域和电子围栏区域之后,可以计算获得定位 精度圆区域与电子围栏区域的重叠面积。例如,若电子围栏区域为矩 形时,则计算定位精度圆区域与矩形的重叠面积;若电子围栏区域为 圆形时,则计算定位精度圆区域与圆形的重叠面积。
46.需要说明的是,若定位精度圆区域和电子围栏区域不存在重叠区 域,即重叠面积为0,则表明目标车辆当前不在电子围栏区域。
47.步骤130、若重叠面积与定位精度圆区域的面积比值大于预设值, 则确定目标车辆位于电子围栏区域内。
48.具体地,定位精度圆区域考虑了gps定位精度的影响因素,即 可以理解为定位精度圆区域在gps定位点的位置信息的基础上,考 虑了gps的误差范围,确定了一个圆形区域,基于该圆形区域判断 目标车辆是否在电子围栏内。若重叠面积与定位精度圆区域的面积比 值(面积重叠置信度)大于预设值,则目标车辆位于电子围栏区域的 概率较大。其中,当目标车辆正位于电子围栏边上时,可以将重叠面 积与定位精度圆区域的面积比值设置为预设值,如0.5。
49.本发明实施例提供的基于电子围栏的车辆定位方法,结合gps 定位精度影响因素确定定位精度圆区域,从而能够准确基于定位精度 圆区域与电子围栏区域的重叠面积与定位精度圆区域的面积比值,确 定目标车辆是否位于电子围栏区域内,避免传统方法中gps定位点 存在漂移误差导致无法准确判断共享车辆与电子围栏的相对位置关 系的问题。
50.基于上述实施例,定位精度圆半径是基于如下步骤确定的:
51.基于电子围栏,确定预设初始半径;
52.基于gps定位精度影响因素,确定gps定位点位置信息的误差, 并基于gps定位点位置信息的误差调整预设初始半径,得到定位精 度圆半径;误差影响因素包括gps误差参数、目标车辆的历史定位 准确率以及电子围栏的历史定位准确率中的至少一种。
53.具体地,根据不同站点的电子围栏,确定预设初始半径。例如, 不同站点的电子围栏可能天气不同,下雨天gps误差更大,对应设 置的预设初始半径较小;又如不同站点的电子围栏所处的位置可能不 同,处于树下的电子围栏与处于开阔场地的电子围栏相比,处于树下 的电子围栏的gps误差较大,对应设置的预设初始半径较小。
54.在根据不同站点电子围栏确定预设初始半径之后,还需结合gps 定位精度影响因素调整预设初始半径,最终得到定位精度圆半径。例 如,可以根据gps误差参数(如横向误差、正向误差、海拔误差等) 确定gps定位点位置信息的误差,并基于gps定位点位置信息的误 差调整预设初始半径。又如,可以根据目标车辆的历史定位准确率调 整预设初始半径,若目标车辆的历史定位准确率较低,则可以调小预 设初始半径。此外,还可以根据电子围栏的历史定位准确率调整预设 初始半径,若电子围栏的历史定位准确率较低,则可以调小预设初始 半径。
55.基于上述任一实施例,基于gps定位精度影响因素,确定gps 定位点位置信息的误差,包括:
56.基于gps误差参数以及gps误差参数的阈值区间,确定gps定 位点位置信息的误差;
57.若目标车辆的历史定位准确率小于第一阈值,则基于目标车辆的 历史定位准确率以及第一阈值,确定gps定位点位置信息的误差;
58.若电子围栏的历史定位准确率小于第二阈值,则基于目标车辆的 历史定位准确率以及第二阈值,确定gps定位点位置信息的误差。
59.具体地,对于gps误差参数(如gps的时间戳、hdop参数等), 可以设置不同的阈值区间,根据gps误差参数落在不同阈值区间, 判断gps定位点位置信息的误差大小,若gps误差较大,则调小预 设初始半径,从而使得定位精度圆半径和重叠面积变小。
60.对于目标车辆的历史定位准确率,若该准确率小于第一阈值,则 基于目标车辆的历史定位准确率以及第一阈值,确定gps定位点位 置信息的误差,若误差较大,则调小预设初始半径,从而使得定位精 度圆半径和重叠面积变小。其中,目标车辆的历史准确率可以通过收 集并统计预设时间段内目标车辆的定位投诉获取,例如可以设置第一 阈值为一周内目标车辆收到5次定位投诉,则当该目标车辆一周内收 到6次投诉时,认为gps定位误差较大,需要调小预设初始半径。
61.对于电子围栏的历史定位准确率,若该准确率小于第二阈值,则 基于电子围栏的历史定位准确率以及第二阈值,确定gps定位点位 置信息的误差,若误差较大,则调小预设初始半径,从而使得定位精 度圆半径和重叠面积变小。其中,电子围栏的历史准确率可以通过收 集并统计预设时间段内电子围栏的定位投诉获取,例如可以设置第二 阈值为一周内电子围栏收到10次定位投诉,则当该电子围栏一周内 收到11次投诉时,认为gps定位误差较大,需要调小预设初始半径。
62.基于上述任一实施例,基于目标车辆的gps定位点位置信息, 以及定位精度圆半径,确定定位精度圆区域,之前还包括:
63.获取预设时段内目标车辆的若干个gps定位点初始位置信息, 并基于各初始位置信息确定目标车辆的gps运动状态;
64.若gps运动状态与目标车辆的实际运动状态一致,则将对应的 初始位置信息作为目标车辆的gps定位点位置信息;实际运动状态 是基于预设时段内目标车辆的运动参数确定的。
65.具体地,gps定位点初始位置信息中可能会存在误差较大的定位 点信息,例如gps定位点初始位置信息显示目标车辆是静止的,但 实际目标车辆在移动,即基于gps定位点初始位置信息确定的gps 运动状态与目标车辆的实际运动状态不一致。
66.因此,在获取预设时段内目标车辆的若干个gps定位点初始位 置信息后,基于各初始位置信息确定目标车辆的gps运动状态,若 gps运动状态与目标车辆的实际运动状态一致,则将对应的初始位置 信息作为目标车辆的gps定位点位置信息,若不一致,则表明对应 的gps定位点初始位置信息存在较大误差,需要滤除该位置信息。 其中,实际运动状态可以基于预设时段内目标车辆的运动参数确定, 如通过获取目标车辆的车轮的角速度确定目标车辆当前的实际运动 状态。
67.基于上述任一实施例,运动参数包括目标车辆的车轮的角速度、 目标车辆的速度以及目标车辆的加速度中的至少一种。
68.具体地,通过获取目标车辆的车轮的角速度、目标车辆的速度以 及目标车辆的加速度中的至少一种,可以确定当前目标车辆的实际运 动状态,将实际运动状态与gps运动状态进行比对,若不一致,则 表明对应的gps定位点初始位置信息存在较大误差,需要滤除该位 置信息,从而可以避免误差较大的gps定位点初始位置信息造成的 干扰。
69.基于上述任一实施例,还包括:
70.若重叠面积与定位精度圆区域的面积比值小于预设值,则确定目 标车辆位于电子围栏区域外;
71.若重叠面积与定位精度圆区域的面积比值等于预设值,则确定目 标车辆位于电子围栏区域的围栏边上。
72.具体地,若重叠面积与定位精度圆区域的面积比值小于预设值, 则表明目标车辆位于电子围栏区域外的概率较大;若重叠面积与定位 精度圆区域的面积比值等于预设值,则表明目标车辆位于电子围栏区 域的围栏边上概率较大。
73.基于上述任一实施例,gps定位点位置信息是基于目标车辆对应 的用户终端发送的用户位置信息和/或目标车辆的gps定位模块得到 的gps定位信息确定的。
74.具体地,当目标车辆的gps定位更新延迟时,即无法及时通过 目标车辆的gps定位模块获取gps定位点位置信息时,可以基于用 户终端发送的用户位置信息确定gps定位点位置信息。当目标车辆 的gps定位模块可以正常获取gps定位点位置信息时,可以通过gps 定位模块确定gps定位点位置信息,也可以通过同时获取用户位置 信息和gps定位信息,当用户位置信息与gps定位信息一致时,将 其作为gps定位点位置信息,从而可以过滤差异较大的位置信息。
75.下面对本发明提供的基于电子围栏的车辆定位装置进行描述,下 文描述的基于电子围栏的车辆定位装置与上文描述的基于电子围栏 的车辆定位方法可相互对应参照。
76.基于上述任一实施例,本发明提供一种基于电子围栏的车辆定位 装置,如图2所示,该装置包括:
77.精度圆确定单元210,用于基于目标车辆的gps定位点位置信息, 以及定位精度圆半径,确定定位精度圆区域;定位精度圆半径是基于 gps定位精度影响因素对预设初始半径进行调整确定的;
78.重叠面积确定单元220,用于基于定位精度圆区域,以及目标车 辆的电子围栏区域,确定定位精度圆区域与电子围栏区域的重叠面积;
79.车辆定位单元230,用于若重叠面积与定位精度圆区域的面积比 值大于预设值,则确定目标车辆位于电子围栏区域内。
80.基于上述任一实施例,还包括:
81.初始半径确定单元,用于基于所述电子围栏,确定预设初始半径;
82.初始半径调整单元,用于基于所述gps定位精度影响因素,确 定所述gps定位点位置信息的误差,并基于所述gps定位点位置信 息的误差调整所述预设初始半径,得到所述定位精度圆半径;所述误 差影响因素包括gps误差参数、所述目标车辆的历史定位准确率以 及所述电子围栏的历史定位准确率中的至少一种。
83.基于上述任一实施例,所述初始半径调整单元,包括:
84.第一误差确定单元,用于基于所述gps误差参数以及所述gps 误差参数的阈值区
间,确定所述gps定位点位置信息的误差;
85.第二误差确定单元,用于若所述目标车辆的历史定位准确率小于 第一阈值,则基于所述目标车辆的历史定位准确率以及所述第一阈值, 确定所述gps定位点位置信息的误差;
86.第三误差确定单元,用于若所述电子围栏的历史定位准确率小于 第二阈值,则基于所述目标车辆的历史定位准确率以及所述第二阈值, 确定所述gps定位点位置信息的误差。
87.基于上述任一实施例,还包括:
88.状态确定单元,用于在确定定位精度圆区域之前,获取预设时段 内所述目标车辆的若干个gps定位点初始位置信息,并基于各初始 位置信息确定所述目标车辆的gps运动状态;
89.信息筛选单元,用于若所述gps运动状态与所述目标车辆的实 际运动状态一致,则将对应的初始位置信息作为所述目标车辆的gps 定位点位置信息;所述实际运动状态是基于所述预设时段内所述目标 车辆的运动参数确定的。
90.基于上述任一实施例,所述运动参数包括所述目标车辆的车轮的 角速度、所述目标车辆的速度以及所述目标车辆的加速度中的至少一 种。
91.基于上述任一实施例,还包括:
92.第一判断单元,用于若所述重叠面积与所述定位精度圆区域的面 积比值小于所述预设值,则确定所述目标车辆位于所述电子围栏区域 外;
93.第二判断单元,用于若所述重叠面积与所述定位精度圆区域的面 积比值等于所述预设值,则确定所述目标车辆位于所述电子围栏区域 的围栏边上。
94.基于上述任一实施例,所述gps定位点位置信息是基于所述目 标车辆对应的用户终端发送的用户位置信息和/或所述目标车辆的 gps定位模块得到的gps定位信息确定的。
95.图3是本发明提供的电子设备的结构示意图,如图3所示,该电 子设备可以包括:处理器(processor)310、通信接口(communications interface)320、存储器(memory)330和通信总线340,其中,处理器810, 通信接口320,存储器330通过通信总线340完成相互间的通信。处 理器310可以调用存储器330中的逻辑指令,以执行基于电子围栏的 车辆定位方法,该方法包括:基于目标车辆的gps定位点位置信息, 以及定位精度圆半径,确定定位精度圆区域;所述定位精度圆半径是 基于gps定位精度影响因素对预设初始半径进行调整确定的;基于
96.此外,上述的存储器330中的逻辑指令可以通过软件功能单元的 形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可 读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说 对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品 的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若 干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者 网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而 前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read
‑
onlymemory)、随机存取存储器(ram,random access memory)、磁碟 或者光盘等各种可以存储程序代码的介质。
97.另一方面,本发明还提供一种计算机程序产品,所述计算机程序 产品包括存储在
非暂态计算机可读存储介质上的计算机程序,所述计 算机程序包括程序指令,当所述程序指令被计算机执行时,计算机能 够执行上述各方法所提供的基于电子围栏的车辆定位方法,该方法包 括:基于目标车辆的gps定位点位置信息,以及定位精度圆半径, 确定定位精度圆区域;所述定位精度圆半径是基于gps定位精度影 响因素对预设初始半径进行调整确定的;基于所述定位精度圆区域, 以及所述目标车辆的电子围栏区域,确定所述定位精度圆区域与所述 电子围栏区域的重叠面积;若所述重叠面积与所述定位精度圆区域的 面积比值大于预设值,则确定所述目标车辆位于所述电子围栏区域内。
98.又一方面,本发明还提供一种非暂态计算机可读存储介质,其上 存储有计算机程序,该计算机程序被处理器执行时实现以执行上述各 提供的基于电子围栏的车辆定位方法,该方法包括:基于目标车辆的 gps定位点位置信息,以及定位精度圆半径,确定定位精度圆区域; 所述定位精度圆半径是基于gps定位精度影响因素对预设初始半径 进行调整确定的;基于所述定位精度圆区域,以及所述目标车辆的电 子围栏区域,确定所述定位精度圆区域与所述电子围栏区域的重叠面 积;若所述重叠面积与所述定位精度圆区域的面积比值大于预设值, 则确定所述目标车辆位于所述电子围栏区域内。
99.以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部 件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的 部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也 可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或 者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付 出创造性的劳动的情况下,即可以理解并实施。
100.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解 到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然 也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现 有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软 件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光 盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机, 服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所 述的方法。
101.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而 非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领 域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技 术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修 改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方 案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1