一种超声波检测水中颗粒润湿性的设备及方法
1.本发明涉及颗粒润湿性检测技术领域,具体涉及一种采用超声波检测颗粒润湿性的设备及检测方法。
背景技术:
2.颗粒的润湿性指一种液体在固体表面铺展的能力或倾向性,涉及很多领域,比如矿物和煤炭的分选、石油工业、材料、粉末药物、化妆品等。颗粒的润湿性常采用接触角法座滴法进行表征,该方法通过将颗粒压片成型,测定空气中液滴在颗粒片上的接触角,表征颗粒的润湿性强弱。在矿物和煤炭的浮选领域,颗粒的润湿性关于颗粒的浮选捕集效率。接触角法的润湿性表征结果为颗粒在空气中的润湿性情况,与浮选过程中水中颗粒的润湿性情况并不完全相同,这导致有时接触角法测量的润湿性与颗粒的浮选可浮性相差较大。其他颗粒润湿性检测的常见方法还包括表面张力法,表面张力法通过测定颗粒在不同表面张力溶液中的润湿速度,并换算为接触角来表征颗粒的润湿性。表面张力法仍是针对颗粒在空气中的润湿性测量,该方法的检测结果与颗粒的浮选可浮性有较大偏差。目前,尚不存在一种润湿性检测方法可直接检测颗粒在水中的润湿性情况。
技术实现要素:
3.本发明的目的是提供一种检测水中颗粒润湿性的设备及方法,以解决现有设备和方法无法直接测量水中颗粒润湿性的问题。同时,该方法可对不同亲水和疏水颗粒的混合物进行润湿性表征,并可分析混合物中亲疏水组分的不均匀度,从而获得更多的颗粒润湿性信息。
4.为实现上述目的,本发明提供如下方案:
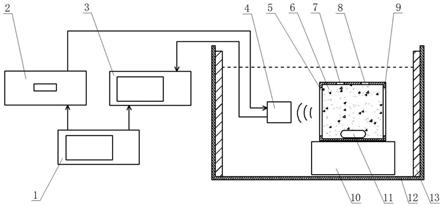
5.1、一种超声波检测水中颗粒润湿性的设备,其特征在于,该设备包括信号发生器1、功率放大器2、示波器3、凹形换能器4、搅拌槽6、磁力搅拌器10、磁力搅拌子11、水槽12和吸声板13,所述信号发生器1输出端连接功率放大器 2和示波器3,所述功率放大器2输出端连接凹形换能器4,所述凹形换能器4 同时连接示波器3,所述搅拌槽6两侧开孔分别为超声波入口5和超声波出口9,所述超声波入口5与超声波出口9均采用薄膜密封,所述搅拌槽上端开两个小孔分别为液体排入口7和气体排出口8,所述磁力搅拌器10放置在装有水且四周粘有吸声板13的水槽12中,磁力搅拌器10上方放置搅拌槽6,搅拌槽6内部放置磁力搅拌子11。
6.一种超声波检测水中颗粒润湿性的方法,其特征在于,包括以下步骤:
7.s1:将待测颗粒加入水中搅拌,得到混合液;
8.s2:将所述步骤s1所述混合液缓慢从搅拌槽6的液体排入口7加入,待槽内空气完全排出后封住气体排出口8和液体排入口7;
9.s3:将所述步骤s2得到的充满混合液的搅拌槽6放置在磁力搅拌器10上方,并将搅拌槽6和与磁力搅拌器10整体置于水槽12中,确保水槽12中水位高于搅拌槽6;
10.s4:开启磁力搅拌器10;
11.s5:控制信号发生器1产生入射信号,所述入射信号经功率放大器2后由凹形换能器4产生声波脉冲,确保所述声波脉冲可完全从超声波入口5射入;
12.s6:通过凹形换能器4采集回声信号,所述回声信号通过示波器3收集;
13.s7:相同入射信号振幅下,重复所述步骤s5
‑
s6,重复次数为n1次,获得相同入射信号振幅下的n1个回声信号;
14.s8:改变入射信号振幅,重复所述步骤s5
‑
s7,重复次数为n2次,获得不同入射信号振幅下的n2组回声信号;
15.s9:对所述步骤s8得到的n2组回声信号进行降噪处理,统计不同入射信号振幅下搅拌槽6中空化概率,其中,空化的判定条件为回声信号最大振幅高于噪声最大振幅2倍以上,反之,则判定空化未发生;
16.s10:通过所述步骤s8得到的空化概率绘制空化概率分布曲线,并通过空化概率分布曲线检测水中颗粒的润湿性,其中,所述空化概率分布曲线评价指标包括空化概率50%时的入射信号振幅p1、开始空化时的入射信号振幅p2、空化概率分布曲线斜度p3;
17.s11:根据所述s10步骤得到的p1、p2和p3检测颗粒的润湿性。
18.可选的,所述根据所述s10步骤得到的p1、p2和p3检测颗粒的润湿性,具体包括:
19.ss1:采用公式拟合获得空化概率分布曲线,得到拟合值p1和a,其中,p1为空化概率为50%时的入射信号振幅,a为标准差。另外,公式中p为空化概率,erf为误差函数,p*为信号发生器的入射信号振幅;
20.ss2:所述步骤ss1得到的p1越大,说明颗粒的润湿性越大;
21.ss3:根据所述步骤ss1得到的p1和a,采用公式p2=p1
‑
2a计算开始空化时的入射信号振幅p2;
22.ss4:所述步骤ss3得到的p2越大,说明颗粒中疏水组分的润湿性越大;
23.ss5:根据所述步骤ss1得到的a,采用公式p3=4a计算空化概率分布曲线斜度p3;
24.ss6:所述步骤ss5得到的p3越大,说明颗粒中亲水组分含量越多;
25.ss7:所述步骤ss3得到的p2越小,且所述步骤ss5获得的p3越大,说明颗粒的润湿性不均匀度越大。
26.优选的,所述颗粒的粒度为
‑
100μm。
27.优选的,所述混合液浓度为0.01g/l
‑
1g/l。
28.优选的,所述磁力搅拌器10转速为100
‑
500rpm。
29.优选的,所述声波脉冲由2
‑
10个周期的声波组成,频率为0.5
‑
100mhz。
30.优选的,所述重复次数n1的范围为10
‑
50,所述重复次数n2的范围为10
‑
50。
31.本发明的工作原理:水中颗粒的润湿性可用颗粒表面气体含量表示。当颗粒亲水性较强时,水中颗粒表面气体较少;当颗粒疏水性较强时,水中颗粒表面气体较多。气泡在水中的空化概率会随着气泡的数量和大小的增加而增加,因此可通过颗粒混合液的空化概率反映水中气泡的数量及大小,从而分析水中颗粒的润湿性。本发明设备中信号发生器1发出入射信号并经由功率放大器2放大,最终经凹形换能器4产生声波脉冲。声波脉冲将激励
颗粒表面气泡形成空化气泡,空化气泡可将部分声波反射,反射信号可由凹形换能器4采集并传输至示波器3。通过对入射、反射信号的分析,便可计算不同颗粒混合液的空化概率,从而得到水中颗粒的润湿性。
32.本发明的有益效果:本发明提出通过超声波实现水中颗粒润湿性的检测设备和方法,利用水中气泡的空化原理,检测分析颗粒混合液中颗粒表面气泡的含量及大小,获得水中颗粒的润湿性。本发明提出的水中颗粒润湿性检测技术是现有技术所不具备的。此外,本发明通过获取不同入射信号振幅条件下的空化概率,绘制空化概率分布曲线,通过对空化概率分布曲线的分析,还可检测出混合颗粒中疏水组分的润湿性、亲水组分的含量以及亲疏水组分的不均匀程度,这些检测结果同样是现有技术所不具备的。本发明提出的水中颗粒润湿性检测方法可针对任意润湿性颗粒进行检测,测试范围广,不需要进行压片处理,测试方法简单,检测结果的重现性好,结果准确度高。
附图说明
33.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
34.图1为本发明所提供的设备构成的示意图。
35.图2为本发明所提供的空化概率分布曲线的示意图。
36.图中:1信号发生器、2功率放大器、3示波器、4凹形换能器、5超声波入口、6搅拌槽、7液体排入口、8气体排出口、9超声波出口、10磁力搅拌器、 11磁力搅拌子、12水槽、13吸声板。
具体实施方式
37.下面将结合本发明中的实施例,对本发明中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.实施例1
39.1、一种超声波检测水中颗粒润湿性的设备,其特征在于,该设备包括信号发生器1、功率放大器2、示波器3、凹形换能器4、搅拌槽6、磁力搅拌器10、磁力搅拌子11、水槽12和吸声板13,信号发生器1输出端连接功率放大器2 和示波器3,功率放大器2输出端连接凹形换能器4,凹形换能器4同时连接示波器3,搅拌槽6两侧开孔分别为超声波入口5和超声波出口9,超声波入口5 与超声波出口9均采用薄膜密封,搅拌槽上端开两个小孔分别为液体排入口7 和气体排出口8,磁力搅拌器10放置在装有水且四周粘有吸声板13的水槽12 中,磁力搅拌器10上方放置搅拌槽6,搅拌槽6内部放置磁力搅拌子11。
40.本发明提供一种超声波检测水中颗粒润湿性的方法,包括以下步骤:
41.s1:将待测颗粒加入水中搅拌,得到混合液;
42.s2:将步骤s1混合液缓慢从搅拌槽6的液体排入口7加入,待槽内空气完全排出后封住气体排出口8和液体排入口7;
43.s3:将步骤s2得到的充满混合液的搅拌槽6放置在磁力搅拌器10上方,并将搅拌槽6和与磁力搅拌器10整体置于水槽12中,确保水槽12中水位高于搅拌槽6;
44.s4:开启磁力搅拌器10;
45.s5:控制信号发生器1产生入射信号,入射信号经功率放大器2后由凹形换能器4产生声波脉冲,确保声波脉冲可完全从超声波入口5射入;
46.s6:通过凹形换能器4采集回声信号,回声信号通过示波器3收集;
47.s7:相同入射信号振幅下,重复步骤s5
‑
s6,重复次数为n1次,获得相同入射信号振幅下的n1个回声信号;
48.s8:改变入射信号振幅,重复步骤s5
‑
s7,重复次数为n2次,获得不同入射信号振幅下的n2组回声信号;
49.s9:对步骤s8得到的n2组回声信号进行降噪处理,统计不同入射信号振幅下搅拌槽6中空化概率,其中,空化的判定条件为回声信号最大振幅高于噪声最大振幅2倍以上,反之,则判定空化未发生;
50.s10:通过步骤s8得到的空化概率绘制空化概率分布曲线,并通过空化概率分布曲线检测水中颗粒的润湿性,其中,空化概率分布曲线评价指标包括空化概率50%时的入射信号振幅p1、开始空化时的入射信号振幅p2、空化概率分布曲线斜度p3;
51.s11:根据s10步骤得到的p1、p2和p3检测颗粒的润湿性。
52.可选的,根据s10步骤得到的p1、p2和p3检测颗粒的润湿性,具体包括:
53.ss1:采用公式拟合获得空化概率分布曲线,得到拟合值p1和a,其中,p1为空化概率为50%时的入射信号振幅,a为标准差。另外,公式中p为空化概率,erf为误差函数,p*为信号发生器的入射信号振幅;
54.ss2:步骤ss1得到的p1越大,说明颗粒的润湿性越大;
55.ss3:根据步骤ss1得到的p1和a,采用公式p2=p1
‑
2a计算开始空化时的入射信号振幅p2;
56.ss4:步骤ss3得到的p2越大,说明颗粒中疏水组分的润湿性越大;
57.ss5:根据步骤ss1得到的a,采用公式p3=4a计算空化概率分布曲线斜度 p3;
58.ss6:步骤ss5得到的p3越大,说明颗粒中亲水组分含量越多;
59.ss7:步骤ss3得到的p2越小,且步骤ss5获得的p3越大,说明颗粒的润湿性不均匀度越大。
60.在本发明中,颗粒的粒度优选范围为
‑
100μm。在本发明中,颗粒粒度为上述范围时,有利于降低因颗粒粒度过大而造成的声波脉冲反射,有利于降低颗粒粒度因素产生的噪音对空化气泡回声信号的干扰。
61.在本发明中,混合液浓度的优选范围为0.01g/l
‑
1g/l。在本发明中,混合液浓度在上述范围时,有利于在保障测试样品代表性的前提下,获得更优的空化概率分布曲线,容易读取p1,p2和p3三个空化概率评价指标。
62.在本发明中,磁力搅拌器10转速的优选范围为100
‑
500rpm。在本发明中,磁力搅拌器转速在上述范围时,有利于在保障颗粒悬浮的同时,降低因搅拌引起的水压变化,获得更准确的空化概率。
63.在本发明中,声波脉冲周期数的优选范围为2
‑
10,频率的优选范围为 0.5
‑
100mhz。在本发明中,声波脉冲周期数在上述范围时,有利于获得清晰的反射信号,同时周期数过长将影响凹形换能器4对反射信号的采集。在本发明中,频率在上述范围时,有利于增加不同颗粒混合液的空化概率差异,更容易比较不同物质颗粒的润湿性差异。
64.在本发明中,重复次数n1的优选范围为10
‑
50,重复次数n2的优选范围为10
‑
50。在本发明中,重复次数n1和n2在上述范围时,有利于获得更准确的空化概率及空化概率分布曲线,同时不会因检测时间过长而引起的混合液性质的变化。
65.本实施例中,颗粒的粒度范围
‑
100μm。
66.本实施例中,混合液浓度为1g/l。
67.本实施例中,磁力搅拌器10转速为300rpm。
68.本实施例中,声波脉冲周期为5,频率为1mhz。
69.本实施例中,重复次数n1为20,重复次数n2为20。
70.本实施例中,颗粒选取石墨、低阶煤和石英为待检测颗粒。
71.通过本发明的超声波检测水中颗粒润湿性的设备及方法,获得石墨的p1, p2和p3值分别为0.09vpp、0.02vpp和0.14vpp,获得低阶煤的p1,p2和p3 值分别为0.32vpp、0.17vpp和0.3vpp,获得石英的p1,p2和p3值分别为0.43vpp、 0.23vpp和0.40vpp。
72.实施例2:
73.本实施例的超声波检测水中颗粒润湿性的设备及方法完全相同,仅仅是步骤中参数的选择不同,具体包括:
74.本实施例中,颗粒的粒度范围
‑
100μm。
75.本实施例中,混合液浓度为0.5g/l。
76.本实施例中,磁力搅拌器10转速为400rpm。
77.本实施例中,声波脉冲周期为5,频率为2mhz。
78.本实施例中,重复次数n1为15,重复次数n2为15。
79.本实施例中,颗粒选取石墨、低阶煤和石英为待检测颗粒。
80.通过本发明的超声波检测水中颗粒润湿性的设备及方法,获得石墨的p1、 p2和p3值分别为0.13vpp、0.02vpp和0.22vpp,获得低阶煤的p1、p2和p3 值分别为0.46vpp、0.24vpp和0.44vpp,获得石英的p1,p2和p3值分别为 0.56vpp、0.3vpp和0.52vpp。
81.实施例3:
82.本实施例的超声波检测水中颗粒润湿性的设备及方法完全相同,仅仅是步骤中参数的选择不同,具体包括:
83.本实施例中,颗粒的粒度范围
‑
100μm。
84.本实施例中,混合液浓度为0.1g/l。
85.本实施例中,磁力搅拌器10转速为100rpm。
86.本实施例中,声波脉冲周期为5,频率为4mhz。
87.本实施例中,重复次数n1为30,重复次数n2为30。
88.本实施例中,颗粒选取石墨、低阶煤和石英为待检测颗粒。
89.通过本发明的超声波检测水中颗粒润湿性的设备及方法,获得石墨的p1、 p2和p3值分别为0.26vpp、0.08vpp和0.36vpp,获得低阶煤的p1、p2和p3 值分别为0.57vpp、0.23vpp和0.68vpp,获得石英的p1,p2和p3值分别为 0.82vpp、0.34vpp和0.96vpp。
90.实施例4:
91.本实施例的超声波检测水中颗粒润湿性的设备及方法完全相同,仅仅是步骤中参数的选择不同,具体包括:
92.本实施例中,颗粒的粒度范围
‑
100μm。
93.本实施例中,混合液浓度为0.01g/l。
94.本实施例中,磁力搅拌器10转速为500rpm。
95.本实施例中,声波脉冲周期为5,频率为0.5mhz。
96.本实施例中,重复次数n1为50,重复次数n2为50。
97.本实施例中,颗粒选取石墨、低阶煤和石英为待检测颗粒。
98.通过本发明的超声波检测水中颗粒润湿性的设备及方法,获得石墨的p1、 p2和p3值分别为0.12vpp、0.04vpp和0.16vpp,获得低阶煤的p1、p2和p3 值分别为0.23vpp、0.13vpp和0.20vpp,获得石英的p1,p2和p3值分别为 0.34vpp、0.18vpp和0.32vpp。
99.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1