基于仿生结构的力信息采集装置、系统及方法
1.本发明涉及传感器技术领域,尤其涉及一种基于仿生结构的力信息采集装置、系统及方法。
背景技术:
2.随着信息技术的发展,机器人由于具有可编程、可控制、运行可靠等特点,已经广泛应用于工业生产、抢险救灾、医疗保健等领域。增强机器人对于外部刺激的感知能力也成为了本领域的研究热点。现有的方法是通过安装在机器人身上的力传感器对外部刺激进行感知。
3.但是现有技术对多维度的力进行感知时,感知机构体积过大、结构复杂,不便于安装使用,而且感知精度不足。
技术实现要素:
4.本发明提供一种基于仿生结构的力信息采集装置、系统及方法,用以解决现有技术中感知机构体积过大、结构复杂,不便于安装使用,而且感知精度不足的缺陷,实现了对力的多维度信息精准且高效的采集与感知。
5.第一方面,本发明提供一种基于仿生结构的力信息采集装置,包括:
6.力信息采集层以及磁场信号采集芯片;
7.所述力信息采集层中嵌有永磁体;
8.所述力信息采集层为弹性结构,用于受力后产生与所述力的第一力信息相对应的形变,以使所述永磁体随所述形变进行运动产生与所述力信息相对应的磁场信号;
9.所述磁场信号采集芯片与所述力信息采集层平行设置,用于采集所述磁场信号,并将所述磁场信号转换为电信号。
10.可选地,根据本发明提供的基于仿生结构的力信息采集装置,所述力信息采集层包括仿默克尔细胞层和/或仿鲁菲尼小体层;
11.其中,所述仿默克尔细胞层用于受到法向力作用后,产生与所述法向力的第二力信息相对应的形变,以使所述仿默克尔细胞层中的永磁体随所述形变进行运动,产生与所述第二力信息相对应的磁场信号;
12.所述仿鲁菲尼小体层用于受到切向力作用后,产生与所述切向力的第三力信息相对应的形变,以使所述仿鲁菲尼小体层中的永磁体随所述形变进行运动,产生与所述第三力信息相对应的磁场信号。
13.可选地,根据本发明提供的基于仿生结构的力信息采集装置,所述力信息采集层还包括:仿表皮层;
14.其中,所述仿表皮层覆盖在所述仿默克尔细胞层和/或仿鲁菲尼小体层的外部,且所述仿表皮层的外表面包括多个凸起点;用于受力后将所述力传递给所述仿默克尔细胞层和/或仿鲁菲尼小体层。
15.可选地,根据本发明提供的基于仿生结构的力信息采集装置,所述力信息采集层由液体硅橡胶制成;
16.其中,所述仿表皮层的硬度大于所述仿默克尔细胞层和/或仿鲁菲尼小体层的硬度。
17.第二方面,本发明提供一种基于仿生结构的力信息采集系统,所述系统包括如第一方面所述基于仿生结构的力信息采集装置;
18.所述系统还包括:机械臂、串口连接线、数据处理装置以及力信息显示装置;其中,
19.所述机械臂用于连接所述磁场信号采集芯片;
20.所述串口连接线与磁场信号采集芯片相连,所述串口连接线与所述数据处理装置相连,所述串口连接线用于将所述磁场信号采集芯片转换的所述电信号传递给所述数据处理装置;
21.所述数据处理装置用于基于所述电信号,确定所述第一力信息的显示信息,并将所述显示信息发送至所述力信息显示装置;
22.所述力信息显示装置用于显示所述第一力信息的显示信息。
23.第三方面,本发明提供一种基于仿生结构的力信息采集方法,包括:
24.基于仿生结构的力信息采集装置中的力信息采集层受力后产生与所述力的第一力信息相对应的形变,以使所述力信息采集层中的永磁体随所述形变进行运动,产生与所述力信息相对应的磁场信号;
25.基于仿生结构的力信息采集装置通过磁场信号采集芯片采集所述磁场信号,并将所述磁场信号转换为电信号。
26.可选地,根据本发明提供的基于仿生结构的力信息采集方法,所述力信息采集层包括仿默克尔细胞层和/或仿鲁菲尼小体层;
27.相应地,所述力信息采集层受力后产生与所述力的第一力信息相对应的形变,以使所述力信息采集层中的永磁体随所述形变进行运动,产生与所述力信息相对应的磁场信号包括以下至少一项:
28.所述仿默克尔细胞层受到法向力作用后,产生与所述法向力的第二力信息相对应的形变,以使所述仿默克尔细胞层中的永磁体随所述形变进行运动,产生与所述第二力信息相对应的磁场信号;
29.所述仿鲁菲尼小体层受到切向力作用后,产生与所述切向力的第三力信息相对应的形变,以使所述仿鲁菲尼小体层中的永磁体随所述形变进行运动,产生与所述第三力信息相对应的磁场信号。
30.可选地,根据本发明提供的基于仿生结构的力信息采集方法,所述力信息采集层还包括:仿表皮层;其中,所述仿表皮层在受力后,通过所述仿表皮层的外表面的多个凸起点,增强所述力;
31.将增强后的力传递给所述仿默克尔细胞层和/或仿鲁菲尼小体层。
32.可选地,根据本发明提供的基于仿生结构的力信息采集方法,所述方法还包括:通过串口连接线将所述电信号传递给所述信号处理单元;
33.通过数据处理装置,基于所述电信号,确定所述第一力信息的显示信息,并将所述显示信息发送至所述力信息显示装置;
34.通过力信息显示装置显示所述第一力信息的显示信息。
35.可选地,根据本发明提供的基于仿生结构的力信息采集方法,所述方法还包括:通过机械臂连接所述磁场信号采集芯片。
36.本发明提供的一种基于仿生结构的力信息采集装置、系统及方法,通过力信息采集层在受力后产生的对应形变,使得力信息采集层中嵌有的永磁体随所述形变进行运动,进而产生与所述力信息相对应的磁场信号,能够精准地感知到力的多维度信息,并通过与力信息采集层平行设置的磁场信号采集芯片将磁场信号转换为容易显性体现的电信号,实现了对力的多维度信息精准且高效的采集与感知。
附图说明
37.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
38.图1是本发明提供的基于仿生结构的力信息采集装置的结构示意图之一;
39.图2是本发明提供的基于仿生结构的力信息采集装置的结构示意图之二;
40.图3是本发明提供的基于仿生结构的力信息采集装置的结构示意图之三;
41.图4是本发明提供的基于仿生结构的力信息采集方法的流程示意图。
具体实施方式
42.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.机器人由于具有可编程、可控制、运行可靠等特点,已经广泛应用于工业生产、抢险救灾、医疗保健等领域,在提高社会生产效率、提升人民幸福指数等方面发挥着愈发重要的作用。而良好的力感知能力能够使得机器人与外部环境之间的交互更加安全,从而大大提升机器人在复杂环境中执行困难任务的能力。由于外部刺激往往是多维度、非线性的,因此单一维度的力传感器并不能满足相关需求,此外传统传感器安装在机器人上,对机器人的体积、自身重量等相关指标均有很大程度的影响。
44.为了解决上述问题,本发明提供的基于仿生结构的力信息采集装置,通过力信息采集层,实现了对力的多维度信息精准且高效的采集与感知。
45.图1是本发明提供的基于仿生结构的力信息采集装置的结构示意图之一,如图1所示,该装置包括:力信息采集层110以及磁场信号采集芯片120;其中:
46.所述力信息采集层110中嵌有永磁体;
47.所述力信息采集层110为弹性结构,用于受力后产生与所述力的第一力信息相对应的形变,以使所述永磁体随所述形变进行运动产生与所述力信息相对应的磁场信号;
48.所述磁场信号采集芯片120与所述力信息采集层110平行设置,用于采集所述磁场信号,并将所述磁场信号转换为电信号。
49.其中,所述力的第一力信息可以是多维度力信号,可以包括以下至少一项:力的大小、力的方向、力的旋转方向、力的旋转角度、力的旋转速度。
50.可选地,力信息采集层110可以为弹性结构,在受到力的作用后,可以产生相应的形变。
51.可选地,力信息采集层110中的永磁体可以是一个,也可以是多个。所述永磁体可以以阵列或者其他方式嵌在力信息采集层110中。
52.可选地,当力信息采集层110受力后可以产生与所述力的第一力信息相对应的形变,使嵌于力信息采集层内的至少一个永磁体随所述形变进行运动,导致永磁体的空间位置变化,进而使得永磁体的磁场发生变化,进而使得永磁体周围相应的磁场强度发生变化,产生与所述力信息相对应的磁场信号。
53.可选地,所述磁场信号采集芯片120可以平行设置于所述力信息采集层110的上方,也可以平行设置于所述力信息采集层110的下方。
54.在所述力信息采集层110产生所述力信息相对应的磁场信号后,所述磁场信号采集芯片120可以采集磁场信号,并将其转换为电信号。
55.本发明通过力信息采集层在受力后产生的对应形变,使得力信息采集层中嵌有的永磁体随所述形变进行运动,进而产生与所述力信息相对应的磁场信号,能够精准地感知到力的多维度信息,并通过与力信息采集层平行设置的磁场信号采集芯片将磁场信号转换为容易显性体现的电信号,实现了对力的多维度信息精准且高效的采集与感知。
56.可选地,所述力信息采集层包括仿默克尔细胞层和/或仿鲁菲尼小体层;
57.其中,所述仿默克尔细胞层用于受到法向力作用后,产生与所述法向力的第二力信息相对应的形变,以使所述仿默克尔细胞层中的永磁体随所述形变进行运动,产生与所述第二力信息相对应的磁场信号;
58.所述仿鲁菲尼小体层用于受到切向力作用后,产生与所述切向力的第三力信息相对应的形变,以使所述仿鲁菲尼小体层中的永磁体随所述形变进行运动,产生与所述第三力信息相对应的磁场信号。
59.可选地,法向力可以是与所述磁场信号采集芯片所在平面垂直的力。切向力可以是与所述磁场信号采集芯片所在平面平行的力。
60.可选地,所述力信息采集层包括仿默克尔细胞层,仿默克尔细胞层使用低硬度液体硅橡胶材料制备,并通过微加工技术将永磁体装配在预留空隙中,通过模拟皮肤中默克尔细胞的形态学和功能学特性来感测外部法向力刺激。
61.可选地,所述仿默克尔细胞层在受到法向力作用后,会使仿默克尔细胞层发生形变,使得仿默克尔细胞层中的永磁体的空间位置发生变化,进而引起磁场信号采集芯片探测到的法向力方向磁感应强度发生改变,进而产生法向力的第二力信息相对应的磁场信号。
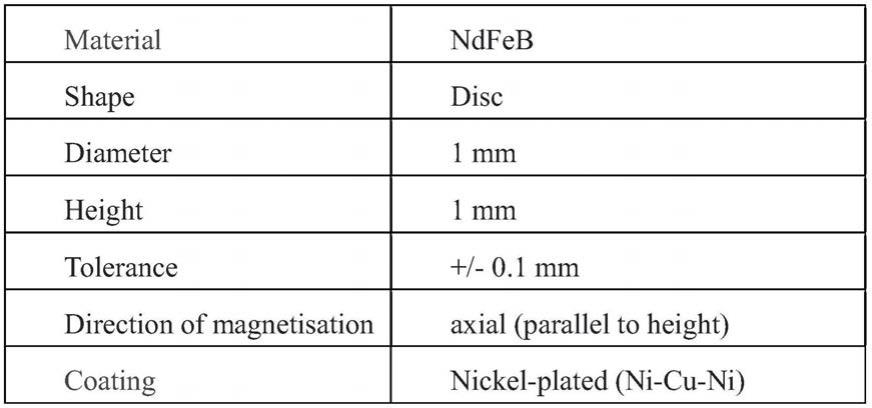
62.可选地,仿默克尔细胞层中的永磁体可以为圆柱状永磁体。
63.可选地,装配在仿默克尔细胞层中的圆柱状永磁体的直径可以为1mm,高度可以为1mm,材料类型可以为钕铁硼(ndfeb),强度可以为n45,其相关参数如表1所示。
64.表1
[0065][0066][0067]
可选地,表1仅作为圆柱状永磁体的参数的一个示例,不作为对本发明提供的圆柱状永磁体的限定。
[0068]
可选地,可以在每10
‑
20mm2的区域内至少装配一个圆柱状永磁体。
[0069]
可选地,圆柱状永磁体可以均匀分布在仿默克尔细胞层,使得仿默克尔细胞层能够更精确的感知外部力刺激。
[0070]
可选地,所述力信息采集层包括仿鲁菲尼小体层,仿鲁菲尼小体层可以使用低硬度液体硅橡胶材料制备,并通过微加工技术将永磁体装配在预留空隙中,通过模拟皮肤中仿鲁菲尼小体的形态学和功能学特性来感测外部切向力刺激。
[0071]
可选地,所述仿鲁菲尼小体层在受到切向力作用后,仿鲁菲尼小体层发生形变,使得仿鲁菲尼小体层中的永磁体的空间位置发生变化,进而引起磁场信号采集芯片探测到的切向力方向磁感应强度发生改变,进而产生切向力的第三力信息相对应的磁场信号。
[0072]
可选地,仿鲁菲尼小体层中的永磁体可以为长条状永磁体。
[0073]
可选地,装配在仿鲁菲尼小体层中的长条状永磁体的长可以为5mm,宽可以为1.5mm,高可以为1mm,材料类型可以为钕铁硼(ndfeb),强度可以为n45,其相关参数如表2所示。
[0074]
表2
[0075]
[0076][0077]
可选地,表2仅作为长条状永磁体的参数的一个示例,不作为对本发明提供的长条状永磁体的限定。
[0078]
可选地,可以在每40
‑
50mm2的区域内至少装配一个长条状永磁体。
[0079]
可选地,长条状永磁体可以均匀分布在仿鲁菲尼小体层,使得仿鲁菲尼小体层能够更精确的感知外部力刺激。
[0080]
可选地,图2是本发明提供的基于仿生结构的力信息采集装置的结构示意图之二,如图2所示。
[0081]
所述力信息采集层包括仿默克尔细胞层和仿鲁菲尼小体层,在感受到法向力时,所述仿默克尔细胞层会发生形变,使得仿默克尔细胞层中的永磁体的空间位置发生变化,引起法向力的磁感应强度发生改变,进而产生法向力的第二力信息相对应的磁场信号。在感受到切向力作用时,位于仿默克尔细胞层下方的仿鲁菲尼小体层会发生形变,使得仿鲁菲尼小体层中的永磁体的空间位置发生变化,引起切向力的磁感应强度发生改变,进而产生切向力的第三力信息相对应的磁场信号。
[0082]
可选地,仿默克尔细胞层还可以在仿鲁菲尼小体层下方。
[0083]
本发明通过仿默克尔细胞层和/或仿鲁菲尼小体层对人体皮肤感受小体的形态学和高性能学特性进行模仿,结合微加工技术,实现了对外部多维度、非线性力刺激的更加精确感知。
[0084]
可选地,所述力信息采集层还包括:仿表皮层;
[0085]
其中,所述仿表皮层覆盖在所述仿默克尔细胞层和/或仿鲁菲尼小体层的外部,且所述仿表皮层的外表面包括多个凸起点;用于受力后将所述力传递给所述仿默克尔细胞层和/或仿鲁菲尼小体层。
[0086]
可选地,所述仿表皮层可以覆盖在所述仿默克尔细胞层和/或仿鲁菲尼小体层的外部,当外部环境对仿表皮层施加力刺激时,仿表皮层会产生形变,通过其上的突起结构变形,增强外部力刺激并向下传递,传递给所述仿默克尔细胞层和/或仿鲁菲尼小体层。
[0087]
可选地,所述仿表皮层还可以为细密双面凸起的结构,用于模拟皮肤表皮层的形
态学和功能学特性,该双面凸起结构可以放大仿表皮层的形变,进而增强力的感知程度。
[0088]
本发明通过拥有双面凸起结构的仿表皮层模拟人体皮肤表皮层的形态学和功能学特性,可以放大形变,进而可以放大力的感知程度,增强仿表皮层受到的力,并将所述力传递给所述仿默克尔细胞层和/或仿鲁菲尼小体层,提高了对外部力刺激的感知程度,进而提高感知到的力信息的精确度。
[0089]
可选地,所述力信息采集层由液体硅橡胶制成;
[0090]
其中,所述仿表皮层的硬度大于所述仿默克尔细胞层和/或仿鲁菲尼小体层的硬度。
[0091]
可选地,所述力信息采集层可以由液体硅橡胶制成,且所述力信息采集层具有弹性结构,使得力信息采集层在受到力作用时,可以产生形变,以此更好地感测所述力的力信息。
[0092]
可选地,所述仿表皮层可以使用高硬度液体硅橡胶材料制备。
[0093]
例如,所述仿表皮层的高硬度液体硅橡胶可以是ecoflex 00
‑
50,该材料的邵氏硬度可以为shore 00
‑
50。其中,ecoflex 00
‑
50的材料相关参数如表3所示。
[0094]
表3
[0095]
specific gravity1.07g/ccspecific volume25.9cu.in./lb.pot life18minutescure time3hoursshore hardness00
‑
50tensile strength315psi100%modulus12psielongation@break980%die b tear strength50plishrinkage<.001in./in.mix ratio by volume1a:1bmix ratio by weight1a:1bcolortranslucentuseful temperature(min)
‑
65
°
fuseful temperature(max)450
°
fmixed viscosity8,000cps
[0096]
可选地,表3仅作为仿表皮层的高硬度液体硅橡胶的参数的一个示例,不作为对本发明提供的仿表皮层的高硬度液体硅橡胶的限定。
[0097]
可选地,所述仿默克尔细胞层和仿鲁菲尼小体层可以使用低硬度液体硅橡胶材料制备。
[0098]
例如,所述仿默克尔细胞层和仿鲁菲尼小体层的低硬度液体硅橡胶可以是ecoflex 00
‑
30,该产品的邵氏硬度可以为shore 00
‑
30。其中,shore 00
‑
30的材料相关参数如表4所示。
[0099]
表4
[0100]
specific gravity1.07g/ccspecific volume26.0cu.in./lb.pot life45minutescure time4hoursshore hardness00
‑
30tensile strength200psi100%modulus10psielongation@break900%die b tear strength38plishrinkage<.001in./in.mix ratio by volume1a:1bmix ratio by weight1a:1bcolortranslucentuseful temperature(min)
‑
65
°
fuseful temperature(max)450
°
fmixed viscosity3,000cps
[0101]
可选地,表4仅作为仿默克尔细胞层和仿鲁菲尼小体层的低硬度液体硅橡胶的参数的一个示例,不作为对本发明提供的仿默克尔细胞层和仿鲁菲尼小体层的低硬度液体硅橡胶的限定。
[0102]
可选地,所述仿表皮层的硬度可以大于所述仿默克尔细胞层和/或仿鲁菲尼小体层的硬度,以保护仿默克尔细胞层和/或仿鲁菲尼小体层,且可以更好地模仿人体皮肤的结构。
[0103]
本发明通过使用不同硬度的液体硅橡胶材料,使得所述仿表皮层能够更加贴合人体皮肤的形态学和功能学特性,降低了力信息采集层对机器人自身体积及重量的影响,同时更精确的感知外部多维度、非线性力刺激。
[0104]
可选地,图3是本发明提供的基于仿生结构的力信息采集装置的结构示意图之三,如图3所示:
[0105]
所述装置还包括:机械臂、串口连接线、数据处理装置以及力信息显示装置。
[0106]
所述机械臂用于连接所述磁场信号采集芯片;
[0107]
所述串口连接线与磁场信号采集芯片相连,所述串口连接线与所述信号处理单元相连,所述串口连接线用于将所述磁场信号采集芯片转换的所述电信号传递给所述数据处理装置;
[0108]
所述数据处理装置用于基于所述电信号,确定所述第一力信息的显示信息,并将所述显示信息发送至所述力信息显示装置;
[0109]
可选地,所述数据处理装置的处理器可以为intel i7
‑
10700,所述数据处理装置可以在ram 16.00gb的平台上运行,运用回归算法对预处理后的动态电信号进行回归,得到外部力的力信息。
[0110]
所述力信息显示装置用于显示所述第一力信息的显示信息。
[0111]
可选地,力信息显示装置可以为27inch宽屏,其根据回归得到的外部力的力信息,
运用可视化方法对力信息进行显示。
[0112]
可选地,本发明通过机械臂连接所述磁场信号采集芯片,磁场信号采集芯片将采集的力信息的磁场信号转换成对应的电信号。所述串口连接线将磁场信号采集芯片发送的电信号传递给数据处理装置。数据处理装置在接收到电信号后,对电信号进行回归,确定所述第一力信息的显示信息,并将所述显示信息发送至力信息显示装置。力信息显示装置显示接收到的所述第一力信息的显示信息。
[0113]
可选地,第一力信息的显示信息可以包括:力的大小、力的方向、力的旋转角度、力的旋转速度以及力的旋转方向等。
[0114]
本发明通过串口连接线、数据处理装置以及力信息显示装置将力信息采集层采集的力信息进行转化回归,显示在力信息显示装置中,使得用户能够对力信息采集层受到的力的信息能够拥有更直观清晰的感受。
[0115]
可选地,所述力信息采集层中的磁场信号采集芯片可以固定于机械臂外表面。机械臂在与外部环境发生交互的过程中,力信息采集层可以采集外部力刺激对机械臂的作用,增强了机器人对外部刺激的感知,提升了机器人在交互过程中完成对应任务的成功率。同时通过信息显示模块显示外部力的力信息,便于后续的分析与处理。
[0116]
可选地,磁场信号采集芯片还可以固定于其他机器人设备上。
[0117]
可选地,所述外部力刺激的方向可以包括空间中x、y与z三个方向。其中,所述x与y方向所成平面可以与所述磁场信号采集芯片所在平面平行,所述x与y方向所受的力可以为切向力。所述z方向可以与所述磁场信号采集芯片所在平面垂直,所述z方向所受的力可以为法向力。
[0118]
可选地,当外部环境对力信息采集层施加力刺激时,与外部环境接触的仿表皮层可以产生形变,通过其上的双面细密凸起结构,增强其形变并向仿默克尔细胞层和/或仿鲁菲尼小体层传递。仿默克尔细胞层中的圆柱状永磁体的空间位置发生变化引起磁场强度发生变化,磁场信号采集芯片采集z方向的磁感的磁场信号,在感受到切向力作用时,仿鲁菲尼小体层会发生形变,使得长条状永磁体的空间位置发生变化,引其磁场强度发生变化,磁场信号采集芯片采集x、y方向磁感场信号。
[0119]
本发明通过x、y与z三个方向,将力分解成三个方向的作用力,实现了对多维度的力感知。
[0120]
本发明通过力信息采集层在受力后产生的对应形变,使得力信息采集层中嵌有的永磁体随所述形变进行运动,进而产生与所述力信息相对应的磁场信号,能够精准地感知到力的多维度信息,并通过与力信息采集层平行设置的磁场信号采集芯片将磁场信号转换为容易显性体现的电信号,实现了对力的多维度信息精准且高效的采集与感知。
[0121]
下面对本发明提供的基于仿生结构的力信息采集系统进行描述,下文描述的基于仿生结构的力信息采集系统与上文描述的基于仿生结构的力信息采集装置可相互对应参照。
[0122]
本发明提供基于仿生结构的力信息采集系统,该系统包括:力信息采集层以及磁场信号采集芯片;
[0123]
所述力信息采集层中嵌有永磁体;
[0124]
所述力信息采集层为弹性结构,用于受力后产生与所述力的第一力信息相对应的
形变,以使所述永磁体随所述形变进行运动产生与所述力信息相对应的磁场信号;
[0125]
所述磁场信号采集芯片与所述力信息采集层平行设置,用于采集所述磁场信号,并将所述磁场信号转换为电信号。
[0126]
可选地,所述力信息采集层包括仿默克尔细胞层和/或仿鲁菲尼小体层;
[0127]
其中,所述仿默克尔细胞层用于受到法向力作用后,产生与所述法向力的第二力信息相对应的形变,以使所述仿默克尔细胞层中的永磁体随所述形变进行运动,产生与所述第二力信息相对应的磁场信号;
[0128]
所述仿鲁菲尼小体层用于受到切向力作用后,产生与所述切向力的第三力信息相对应的形变,以使所述仿鲁菲尼小体层中的永磁体随所述形变进行运动,产生与所述第三力信息相对应的磁场信号。
[0129]
可选地,所述力信息采集层还包括:仿表皮层;
[0130]
其中,所述仿表皮层覆盖在所述仿默克尔细胞层和/或仿鲁菲尼小体层的外部,且所述仿表皮层的外表面包括多个凸起点;用于受力后将所述力传递给所述仿默克尔细胞层和/或仿鲁菲尼小体层。
[0131]
可选地,所述力信息采集层由液体硅橡胶制成;
[0132]
其中,所述仿表皮层的硬度大于所述仿默克尔细胞层和/或仿鲁菲尼小体层的硬度。
[0133]
所述系统还包括:机械臂、串口连接线、数据处理装置以及力信息显示装置;其中,
[0134]
所述机械臂用于连接所述磁场信号采集芯片;
[0135]
所述串口连接线与磁场信号采集芯片相连,所述串口连接线与所述数据处理装置相连,所述串口连接线用于将所述磁场信号采集芯片转换的所述电信号传递给所述数据处理装置;
[0136]
所述数据处理装置用于基于所述电信号,确定所述第一力信息的显示信息,并将所述显示信息发送至所述力信息显示装置;
[0137]
所述力信息显示装置用于显示所述第一力信息的显示信息。
[0138]
本发明通过力信息采集层在受力后产生的对应形变,使得力信息采集层中嵌有的永磁体随所述形变进行运动,进而产生与所述力信息相对应的磁场信号,能够精准地感知到力的多维度信息,并通过与力信息采集层平行设置的磁场信号采集芯片将磁场信号转换为容易显性体现的电信号,实现了对力的多维度信息精准且高效的采集与感知。
[0139]
下面对本发明提供的基于仿生结构的力信息采集方法进行描述,下文描述的基于仿生结构的力信息采集方法与上文描述的基于仿生结构的力信息采集装置可相互对应参照。
[0140]
图4是本发明提供的基于仿生结构的力信息采集方法的流程示意图,如图2所示,该方法包括如下步骤:
[0141]
步骤410,基于仿生结构的力信息采集装置中的力信息采集层受力后产生与所述力的第一力信息相对应的形变,以使所述力信息采集层中的永磁体随所述形变进行运动,产生与所述力信息相对应的磁场信号;
[0142]
步骤420,基于仿生结构的力信息采集装置通过磁场信号采集芯片采集所述磁场信号,并将所述磁场信号转换为电信号。
[0143]
本发明通过力信息采集层在受力后产生的对应形变,使得力信息采集层中嵌有的永磁体随所述形变进行运动,进而产生与所述力信息相对应的磁场信号,能够精准地感知到力的多维度信息,并通过与力信息采集层平行设置的磁场信号采集芯片将磁场信号转换为容易显性体现的电信号,实现了对力的多维度信息精准且高效的采集与感知。
[0144]
可选地,所述力信息采集层包括仿默克尔细胞层和/或仿鲁菲尼小体层;
[0145]
相应地,所述力信息采集层受力后产生与所述力的第一力信息相对应的形变,以使所述力信息采集层中的永磁体随所述形变进行运动,产生与所述力信息相对应的磁场信号包括以下至少一项:
[0146]
所述仿默克尔细胞层受到法向力作用后,产生与所述法向力的第二力信息相对应的形变,以使所述仿默克尔细胞层中的永磁体随所述形变进行运动,产生与所述第二力信息相对应的磁场信号;
[0147]
所述仿鲁菲尼小体层受到切向力作用后,产生与所述切向力的第三力信息相对应的形变,以使所述仿鲁菲尼小体层中的永磁体随所述形变进行运动,产生与所述第三力信息相对应的磁场信号。
[0148]
可选地,所述力信息采集层还包括:仿表皮层;所述仿表皮层在受力后,通过所述仿表皮层的外表面的多个凸起点,增强所述力;
[0149]
将增强后的力传递给所述仿默克尔细胞层和/或仿鲁菲尼小体层。
[0150]
可选地,所述方法还包括:
[0151]
通过串口连接线将所述电信号传递给所述信号处理单元;
[0152]
通过数据处理装置,基于所述电信号,确定所述第一力信息的显示信息,并将所述显示信息发送至所述力信息显示装置;
[0153]
通过力信息显示装置显示所述第一力信息的显示信息。
[0154]
可选地,所述方法还包括:通过机械臂连接所述磁场信号采集芯片。
[0155]
本发明通过力信息采集层在受力后产生的对应形变,使得力信息采集层中嵌有的永磁体随所述形变进行运动,进而产生与所述力信息相对应的磁场信号,能够精准地感知到力的多维度信息,并通过与力信息采集层平行设置的磁场信号采集芯片将磁场信号转换为容易显性体现的电信号,实现了对力的多维度信息精准且高效的采集与感知。
[0156]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1