一种离子聚合物摩擦感知型人工皮肤
1.本发明属于人工皮肤摩擦传感技术领域,具体涉及一种离子聚合物摩擦感知型人工皮肤。
背景技术:
2.触觉是人类五大基本感觉之一,不仅仅是感知外部世界的手段,而且是人类情感交流的重要途径,因此,触觉技术一直是科学前沿研究的热点。人工皮肤是多个柔性力学传感单元阵列化实现多点压力感知,能够在一定程度上模拟人类皮肤的触觉功能的换能器,在可穿戴设备、柔性机器人、健康监测、用户交互界面等领域具有重要的应用价值。尽管由电子元件组成的人工皮肤取得了巨大进步,如kim等人利用纳米硅制作的电子型人工皮肤,但是其存在柔性化程度低的问题难以得到广泛应用。xia等人基于石墨烯薄膜制造的柔性压力传感器,具有灵敏度高和压力测试范围宽的优点,但是其设计以聚二甲基硅氧烷(pdms)膜为石墨烯膜的基底,采用化学气相沉积的方法制作石墨烯薄膜,存在制备流程复杂、加工困难等问题。
3.随着材料科学的发展,出现了很多柔性传感材料,离子聚合物是一种柔性聚合物材料,具有质量轻、柔韧性好、天然的仿生优势和良好的加工方式等优点,由离子聚合物为基底制作的柔性传感器在压力和摩擦力的作用下具有电压或者电流响应,从而可以实现对压力和摩擦力的感知。本发明提出一种离子聚合物摩擦感知型人工皮肤,集成压力传感器和摩擦力传感器,设计了压力传感器和摩擦传感器垂直分布与水平分布的结构,压力和摩擦力传感器感知芯层采用溶液铸膜的方式制作,具有结构简单、方便制作的优点,压力传感器和摩擦传感器在外力作用下表现为电压或者电流响应的实时变化,因此能够实现动态摩擦力的感知,具有广阔的应用前景。
技术实现要素:
4.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种离子聚合物摩擦感知型人工皮肤,实现对摩擦力的感知。
5.本发明采用以下技术方案:
6.一种离子聚合物摩擦感知型人工皮肤,包括压力传感器芯层和摩擦传感器芯层,压力传感器芯层的上侧和下侧分别设置电极层构成压力传感器,摩擦传感器芯层的上侧和下侧分别设置电极层构成摩擦传感器,压力传感器和摩擦传感器分别连接对应的调理电路,多个压力传感器和摩擦传感器采用水平分布或垂直分布的方式封装在密封层的下方形成离子聚合物摩擦感知型人工皮肤,用于获取物体表面粗糙程度实现皮肤触觉感知。
7.具体的,压力传感器和摩擦传感器水平分布时,压力传感器和摩擦传感器的数量比为1:(1~7)。
8.具体的,多个压力传感器和摩擦传感器水平分布时,按方形或圆形结构阵列布置。
9.具体的,压力传感器和摩擦传感器垂直分布时,从上至下依次包括:密封层、压力
传感器上电极层、压力传感器芯层、压力传感器下电极层、连接层、摩擦传感器上电极层、摩擦传感器芯层和摩擦传感器下电极层。
10.具体的,压力传感器和摩擦传感器垂直分布时,按圆心、方形或三角形结构阵列布置。
11.具体的,压力传感器芯层为带有表面微结构或者含有多孔微结构的离子交换膜,分布密度为10~120个/cm2。
12.具体的,摩擦传感器芯层为厚度大于等于200微米的离子交换膜,摩擦传感器芯层上设置的感知单元特征尺寸为0.5~5mm,分布密度为15~50个/cm2。
13.进一步的,离子交换膜包括:全氟磺酸离子交换膜、全氟羧酸质子交换膜、全氟磺酸质子交换膜和/或全氟磺酸树脂。
14.具体的,压力传感器芯层的制备具体为:
15.在硅片上刻蚀阵列结构作为铸膜用模具;使用5%浓度的nafion溶液,经搅拌浓缩、抽真空获得铸膜溶液;将铸膜液旋涂到模具表面,然后经真空干燥和60~80℃烘干处理固化成膜;然后将模具置于去离子水中,进行脱膜处理得到带有表面微结构或含有多孔微结构的压力传感器芯层。
16.具体的,摩擦传感器芯层的制备具体为:
17.使用5%浓度的nafion溶液浓缩获得20%~25%的铸膜液;将铸膜液滴入模具表面,并经真空干燥和60~80℃高温烘干处理固化成膜,然后进行脱膜处理获得摩擦传感器芯层。
18.与现有技术相比,本发明至少具有以下有益效果:
19.本发明一种离子聚合物摩擦感知型人工皮肤,多个压力传感器和摩擦传感器采用水平分布或者垂直分布的方式,能够分别或同时测量接触压力和摩擦力,并判断物体粗糙程度。
20.进一步的,压力传感器和摩擦传感器水平分布时,压力传感器和摩擦传感器的数量比为1:(1~7)。通过压力传感器感知局部压力大小,摩擦力传感器分别感知该部位不同方向的摩擦力。
21.进一步的,多个压力传感器和摩擦传感器水平分布时,按方形或圆形结构阵列布置。压力传感器分布在中心感知局部压力大小,一定数量的摩擦传感器围绕中心的压力传感分布在四周,感知不同方向的摩擦力。
22.进一步的,压力传感器和摩擦传感器可以成对的方式垂直分布,一对压力传感器和摩擦传感器分别感知同一部位的压力和摩擦力。
23.进一步的,压力传感器和摩擦传感器成对的方式垂直分布时,按圆形、方形或三角形结构阵列布置,可以感知不同位置、不同方向的摩擦力。
24.进一步的,压力传感器芯层为带有表面微结构或者含有多孔微结构的离子交换膜,分布密度为10~120个/cm2,根据实际需求设置不同分辨率的压力传感器。进一步的,摩擦传感器芯层为厚度大于等于200微米的离子交换膜,摩擦传感器芯层上设置的感知单元特征尺寸为0.5~5mm,分布密度为15~50个/cm2。根据实际需求设置不同分辨率的摩擦传感器。
25.进一步的,离子交换膜包括:全氟磺酸离子交换膜、全氟羧酸质子交换膜、全氟磺
酸质子交换膜和/或全氟磺酸树脂,可以实现力
‑
电转化的国内外离子交换膜均可使用。
26.进一步的,压力传感器芯层制备采用翻模法,获得带有表面微结构的压力传感器芯层。
27.进一步的,摩擦传感器芯层制备采用溶液铸膜法,制备流程简单。
28.综上所述,本发明制作简单且灵敏度高,能够实现动态摩擦力的感知,具有广阔的应用前景。
29.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
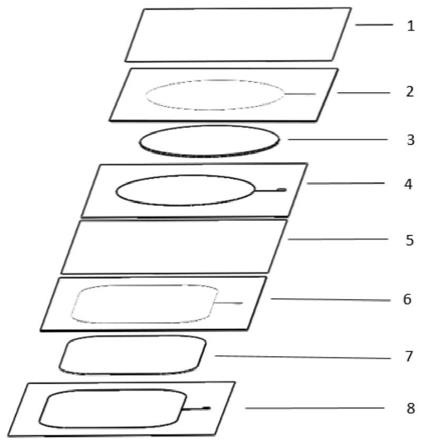
30.图1为本发明的一种结构示意图;
31.图2为本发明的另一种结构示意图;
32.图3为本发明压力传感器芯层的微阵列单元结构示意图,其中,(a)为表面具有微型棱锥结构的压力传感芯层,(b)为表面具有微型棱台结构的压力传感芯层;
33.图4为压力和摩擦传感器垂直分布的摩擦人工皮肤电极层结构示意图,其中,(a)为压力传感器电极层,(b)为摩擦力传感器电极层。
34.其中:1.密封层;2.压力传感器上电极层;3.压力传感器芯层;4.压力传感器下电极;5.连接层;6.摩擦传感器上电极层;7.摩擦传感器芯层;8.摩擦传感器下电极层。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“一侧”、“一端”、“一边”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
38.应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
39.还应当理解,在本发明说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明。如在本发明说明书和所附权利要求书中所使用的那样,除非上下
文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
40.还应当进一步理解,在本发明说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
41.在附图中示出了根据本发明公开实施例的各种结构示意图。这些图并非是按比例绘制的,其中为了清楚表达的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的区域/层。
42.本发明提供了一种离子聚合物摩擦感知型人工皮肤,包括离子聚合物压力传感器、离子聚合物摩擦传感器、调理电路和封装结构,离子聚合物压力传感器由压力传感芯层、上下电极层构成,离子聚合物摩擦传感器由摩擦传感芯层和上下电极层构成。能够分别或同时感知动态接触压力和摩擦力,判断物体粗糙程度,制作简单且灵敏高,在可穿戴设备、柔性机器人、健康检测、用户交互界面等领域具有广阔的应用前景。
43.本发明一种离子聚合物摩擦感知型人工皮肤,包括密封层1,压力传感器芯层3和摩擦传感器芯层7,压力传感器芯层3和摩擦传感器芯层7采用水平分布或垂直分布的方式设置在密封层1的下方,压力传感器芯层3和摩擦传感器芯层7的上方设置有上电极层,压力传感器芯层3和摩擦传感器芯层7的下方设置有下电极层,构成压力传感器和摩擦传感器用于分别或同时测量接触压力和摩擦力,并判断物体粗糙程度,用于机器人或残疾人的触觉感知。
44.其中,压力传感器用于感知其与被测物体的接触压力,摩擦力传感器用于感知其与被测物体表面的摩擦力,通过计算所得摩擦力与压力的比值,即人工皮肤与被测物体之间的摩擦因数,判断物体表面的粗糙程度,分辨表面粗糙程度的变化。
45.压力传感器芯层3和摩擦传感器芯层7采用的材料为离子交换膜,包括但不限于以下材料:全氟磺酸离子交换膜(如杜邦公司的nafion膜)和全氟羧酸质子交换膜(旭硝子公司flemion膜)、全氟磺酸质子交换膜(山东东岳公司),全氟磺酸树脂(solvay公司推出的aquivion膜)等离子交换膜。
46.压力传感器和摩擦传感器水平设置时,形成方形、圆形等阵列,均匀分布在同一平面,压力传感器和摩擦传感器的数目比为1:(1~7)。
47.压力传感器和摩擦传感器垂直设置时,形成圆心、方形、三角形等阵列。
48.请参阅图3,压力传感器芯层3为带有表面微结构或者含有多孔微结构的离子交换膜,分布密度为10~120个/cm2;摩擦传感器芯层7为厚度大于等于200微米的离子聚合物平面膜,感知单元的特征尺寸为0.5~5mm,分布密度为15~50个/cm2。
49.密封层1采用柔性聚酰亚胺胶带、pu膜等具备防水透气性能的绝缘性能良好的柔性高分子材料制作,从而隔绝摩擦传感器与外界的电荷交换和水分交换。
50.本发明一种离子聚合物摩擦感知型人工皮肤的制备过程具体为:
51.s1、制作压力传感器芯层
52.s101、采用微纳光刻技术在硅片上刻蚀底面边长为50μm,单元间距为10μm的金字塔凹坑表面阵列微结构,作为铸膜的模具;
53.s102、使用杜邦公司的5%浓度的nafion溶液,通过搅拌浓缩、抽真空获得铸膜溶
液用于铸膜;
54.s103、用匀胶机将步骤s102获得的铸膜液旋涂到步骤s101制备的模具表面,然后置于真空干燥箱,经过60~80℃高温烘干处理,使得溶液固化成膜;
55.s104、将硅片和步骤s103固化的膜置于去离子水中,在超声辅助作用下进行脱膜获得带有金字塔微结构的离子聚合物人工皮肤的压力传感器芯层薄膜。
56.s2、制作摩擦传感器芯层
57.s201、采用底面边长为5cm*5cm~8cm*8cm的玻璃缸作为铸膜的模具;
58.s202、使用杜邦公司的5%浓度的nafion溶液,通过浓缩获得20%~25%的铸膜液用于铸膜;
59.s203、将铸膜液滴入模具表面,并置于真空干燥箱,经过60~80℃高温烘干处理,使得溶液固化成膜,超声辅助作用下进行脱膜获得摩擦传感器芯层;
60.s3、以柔性印刷电路板(fpc)为电极层,将压力传感器正极2,压力传感器负极4,摩擦传感器正极6,摩擦传感器负极8经电路板末端接入调理电路,组装时,首先压力传感器芯层3贴合压力传感器正极2和压力传感器负极4,摩擦力传感器芯层7贴合摩擦传感器正极6和摩擦传感器负极8,然后通过连接层5连接压力传感器和摩擦力传感器,压力传感器正极2,压力传感器负极4,摩擦传感器正极6和摩擦传感器负极8分别引线接入调理电路,通过密封层对整体进行封装得到人工皮肤;
61.调理电路为电流测试电路或电荷测量电路,通过测量外界摩擦力引起的电流或电荷响应感知摩擦力大小和摩擦因数。
62.s4、组装后进行测试,在400目的待测表面上放置步骤s3制备的人工皮肤,人工皮肤上表面放置一个物块,推动人工皮肤,压力传感器感知人工皮肤所受到的压力大小,摩擦传感器感知人工皮肤所受到的摩擦力的大小,感知所得的压力大小与摩擦力大小的比值即为待测表面的摩擦因数。
63.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中的描述和所示的本发明实施例的组件可以通过各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
64.请参阅图1,压力传感器和摩擦传感器垂直分布的摩擦人工皮肤从上至下依次包括:密封层1、压力传感器上电极层2、压力传感器芯层3、压力传感器下电极层4、连接层5、摩擦传感器上电极层6、摩擦传感器芯层7和摩擦传感器下电极层8。
65.请参阅图2,压力传感器和摩擦传感器水平分布的摩擦人工皮肤,包括密封层1、压力传感器上电极层2、压力传感器芯层3、压力传感器下电极层4、摩擦传感器上电极层6、摩擦传感器芯层7和摩擦传感器下电极层8,压力传感器芯层3和摩擦传感器芯层7水平设置在密封层1的下方,压力传感器芯层3和摩擦传感器芯层7与密封层1之间对应设置压力传感器上电极层2和摩擦传感器上电极层6,压力传感器芯层3和摩擦传感器芯层7的下方对应设置压力传感器下电极层4和摩擦传感器下电极层8。
66.采用压力传感器和摩擦传感器水平布置构成摩擦人工皮肤,可感知摩擦力大小、测量待测表面摩擦因数。压力传感器和摩擦传感器芯层制作工艺与组装过程与例1类似,不再赘述。
67.组装后测试,在800目的待测表面上放置该人工皮肤,人工皮肤上表面放置一个质量为50g的物块,推动该人工皮肤,压力传感器感知人工皮肤所受到的压力大小0.50n,摩擦传感器感知人工皮肤所受到的摩擦力的大小0.329n,感知所得的压力大小与摩擦力大小的比值即为待测表面的摩擦因数。
68.摩擦传感器为5*2*2mm的长方体型结构,包括6块;摩擦传感器以正六边形分布在同一平面,或者以“米”字型分布在同一平面,对于一个确定方向的摩擦力,摩擦传感器具有不同的压电响应,其中压电响应最高的摩擦力传感器长边的垂直方向即为摩擦力的方向。
69.综上所述,本发明一种离子聚合物摩擦感知型人工皮肤,能够分别或同时感知动态接触压力和摩擦力,判断物体粗糙程度,制作简单且灵敏高。
70.以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1