一种基于天基TDM-MIMO雷达空间碎片的测角方法及系统与流程
一种基于天基tdm
‑
mimo雷达空间碎片的测角方法及系统
技术领域
1.本发明属于雷达技术领域,涉及一种基于天基tdm
‑
mimo雷达空间碎片的测角方法及系统,具体涉及天基tdm
‑
mimo雷达检测空间碎片虚拟阵列阶梯形排布校正技术,可用于天基雷达阵列相对空间碎片阶梯形排布情况下的空间测角。
背景技术:
2.传统波束形成器也叫最小方差无失真响应mvdr波束形成器,通过最小化阵列输出功率使得在照射方向为一常数来选择权矢量。传统波束算法可以用来实现超分辨角度估计。在共置mimo雷达中,需要脉冲积累提高雷达探测性能,但当观测目标与雷达发生相对超高速运动时,雷达虚拟阵列相对目标位置会因此发生阶梯形排布。此时进行传统波束方法进行测角,峰会发生展宽,影响了测量性能。目前学者提出在雷达成像中使用补偿方法进行校正,对于目标检测进行测角时也需要一些补偿方法。
3.根据文献调研,目前国内外只有美国搭载空间站上的天基碎片探测雷达,缺少公开资料。现有的研究集中在空间碎片成像上,少部分提出基于步长或速度的补偿方式,尚无天基tdm
‑
mimo雷达检测空间碎片虚拟阵列阶梯形排布校正的方法研究。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提出一种基于天基tdm
‑
mimo雷达空间碎片的测角方法及系统。
5.本发明解决技术的方案是:
6.一种基于天基tdm
‑
mimo雷达空间碎片的测角方法,该方法的步骤包括:
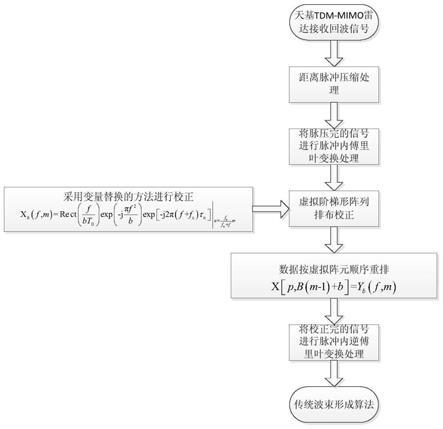
7.步骤一,将每个接收阵元相对目标运动产生的虚拟阶梯形阵列中的每个数据进行距离向脉冲压缩和脉冲内傅里叶变换,得到每个数据的频域表示;雷达位置为n时,第b个接收阵元接收雷达回波数据进行距离向脉冲压缩和脉冲内傅里叶变换后的频域表示为x
b
(f,n),b=1
…
b,b为接收阵元总个数,f为频率,n=1
…
n,n表示雷达位置总个数;
8.步骤二,将每个接收阵元相对目标运动产生的虚拟阶梯形阵列中每个数据的频域表示进行校正;
9.校正的方法为:将x
b
(f,n)中的n替换为得到x
b
(f,n)校正后的数据y
b
(f,m),f
c
为载波频率,m为对n进行线性校正后的位置;
10.步骤三,将每个接收阵元被校正完的数据按虚拟阵元顺序重新排列,得到p
×
bn维矩阵x
p
×
bn
,其中p表示第p次快拍,bn=b
×
n为虚拟阵元数;
11.步骤四,对x
p
×
bn
进行脉冲内逆傅里叶变换,得到数据时域表示x
p
×
bn
,然后采用传统方法进行测角。
12.k为调频斜率,t0为发射
脉冲宽度,τ
n
为雷达位置为n时发射的脉冲对应的时延,r0为雷达与目标间初始距离,v是雷达与目标间相对速度,t为脉冲周期,c为电磁波传播速度。
13.x[p,b
×
(m
‑
1)+b]=y
b
(f,m)。
[0014]
一种基于天基tdm
‑
mimo雷达空间碎片的测角系统,包括脉冲压缩和傅里叶变换模块、校正模块、虚拟阵列重排模块和逆傅里叶变换模块;
[0015]
脉冲压缩和傅里叶变换模块:将每个接收阵元相对目标运动产生的虚拟阶梯形阵列中的每个数据进行距离向脉冲压缩和脉冲内傅里叶变换,得到每个数据的频域表示;
[0016]
校正模块:将每个接收阵元相对目标的虚拟阶梯形阵列中每个数据的频域表示进行校正;
[0017]
虚拟阵列重排模块:将每个接收阵元被校正完的数据按虚拟阵元顺序重新排列,得到p
×
bn维矩阵x,其中p表示第p次快拍,bn=b
×
n为虚拟阵元数;
[0018]
逆傅里叶变换模块:对x
p
×
bn
进行脉冲内逆傅里叶变换,得到数据时域表示x
p
×
bn
,变换完成后执行测角模块;
[0019]
测角模块:采用传统方法进行测角。
[0020]
雷达位置为n时,第b个接收阵元接收雷达回波数据进行距离向脉冲压缩和脉冲内傅里叶变换后的频域表示为x
b
(f,n),b=1
…
b,f为频率,n=1
…
n,n表示雷达位置总个数。
[0021]
校正模块校正的方法为:将x
b
(f,n)中的n替换为得到x
b
(f,n)校正后的数据y
b
(f,m),f
c
为载波频率,m为对n进行线性校正后的位置。
[0022]
k为调频斜率,t0为发射脉冲宽度,τ
n
为雷达位置为n时发射的脉冲对应的时延,r0为雷达与目标间初始距离,v是雷达与目标间相对速度,t为脉冲周期,c为电磁波传播速度。
[0023]
x[p,b
×
(m
‑
1)+b]=y
b
(f,m)。
[0024]
本发明与现有技术相比的有益效果是:
[0025]
本发明充分利用了所有的观测数据,保证了结果的可靠性和稳定度,并减少了运算量和加快了形变检测结果的更新速度,能够在天基tdm
‑
mimo雷达虚拟阵列发生阶梯形排布情况下实现高精度测角,提高了阵列雷达检测目标的性能,有利于在实际工程应用中及时获取碎片信息。
附图说明
[0026]
图1是本发明方法的处理流程图;
[0027]
图2是虚拟阶梯形阵列校正前仿真结果;
[0028]
图3是单个接收阵元形成的虚拟阶梯形阵列校正结果;
[0029]
图4是校正前后传统波束形成算法进行测角结果。
具体实施方式
[0030]
下面结合附图对本发明作进一步阐述。
[0031]
本发明提出一种基于tdm
‑
mimo雷达空间碎片的测角方法及系统,以解决现有技术的不足,提高tdm
‑
mimo雷达的检测性能。但由于雷达阵列与碎片间发生高速相对运动,雷达阵列接收不同回波时,阵列相对于碎片在不同位置,所以天基tdm
‑
mimo形成的虚拟阵列呈阶梯形排布,传统的波束形成算法对目标角度等参数估计性能很差。本发明能够在天基tdm
‑
mimo雷达虚拟阵列发生阶梯形排布情况下实现高精度测角,提高了阵列雷达检测目标的性能。
[0032]
本发明的基本思路是:首先利用变量替换的方法进行阵列阶梯形走动校正,再基于传统波束形成方法获得超高速目标的空间测角。
[0033]
实施例:
[0034]
本发明的使用场景为:采用稀疏发射阵作为雷达平台,发射lfm,带宽50mhz,脉宽t0=10微妙,脉冲周期0.5毫秒,载波频率f
c
=90ghz,c是电磁波传播速度c=3
×
108m/s,波长接收阵元数为b=3,接收阵元间距雷达位置总个数n=3,发射阵元间距为空间碎片目标与tdm
‑
mimo雷达相对速度是10km/s,信噪比为
‑
20db。
[0035]
由于缺乏实际测量的在轨卫星雷达探测空间碎片数据,本发明采用matlab仿真的方式对原理进行仿真,所有步骤、结论都在matlab2019a上验证正确。如图1所示,其具体实现步骤如下:
[0036]
步骤1将每个接收阵元相对目标运动产生的虚拟阶梯形阵列中的每个数据进行脉冲内傅里叶变换,得到每个数据的频域表示x
b
(f,n);x
b
(f,n)解释:雷达位置为n时,第b个接收阵元接收雷达回波数据进行距离向脉冲压缩和脉冲内傅里叶变换后的频域表示为x
b
(f,n),b=1
…
b,b为接收阵元总个数,f为频率,n=1
…
n,n表示雷达位置总个数。
[0037]
利用匹配滤波器对相对碎片高速运动的天基tdm
‑
mimo雷达b个接收阵元中,每个接收阵元接收的n个回波数据进行距离向脉冲压缩。
[0038]
步骤2将每个接收阵元相对目标运动产生的虚拟阶梯形阵列中每个数据的频域表示进行校正,将虚拟阶梯形阵列校正为均匀线阵
[0039]
校正的方法为:将x
b
(f,n)中的n替换为得到x
b
(f,n)校正后的数据y
b
(f,m),即f
c
为载波频率,m为对n进行线性校正后的位置,y
b
(f,m)简记为y
b,m
。
[0040]
τ
n
为第n个脉冲对应的时延,k为调频斜率,t0为发射脉冲宽度,为τ
n
为雷达位置为n时发射的脉冲
对应的时延,r0为雷达与目标间初始距离,v是雷达与目标间相对速度,t为脉冲周期。
[0041]
步骤3将校正完的阵元数据按虚拟阵元顺序重新排列,得到p
×
bn维矩阵x:
[0042]
x[p,b
×
(m
‑
1)+b]=y
b
(f,m),这里x
p
×
bn
=[y
1,1
,y
1,2
,y
1,3
,y
2,1
,y
2,2
,y
2,3
,y
3,1
,y
3,2
,y
3,3
]
[0043]
其中p表示第p次快拍,一共p次快拍,bn为虚拟阵元数;
[0044]
步骤4对x
p
×
bn
进行脉冲内逆傅里叶变换,得到数据时域表示x
p
×
bn
。
[0045]
步骤5通过步骤1至5将虚拟阶梯形阵列校正为均匀线阵,可采用传统方法测角。
[0046]
由图4可知,校正后,峰变得尖锐,提高了测量精度。仿真结果如图2、3、4所示,图2是脉冲压缩结果,由于雷达阵列与目标间相对高速的影响,每个接收阵元形成的虚拟阵列相对目标呈阶梯形排布。图3是对其中一个阶梯形阵列校正为线性阵列。由图4可知,校正后,峰变得尖锐,提高了测量精度,而且在归一化幅度表示中,旁瓣很低,减少对其他目标测量的影响。
[0047]
通过本发明具体实施方式可以看出,本发明所提供的一种充分利用了所有的观测数据,保证了结果的可靠性和稳定度,有利于在实际工程应用中获取更准确目标参数信息。
[0048]
本发明解决在天基雷达与碎片间相对超高速运动时雷达探测目标性能损失问题。天基tdm
‑
mimo雷达能同时完成较大空域搜索任务和多目标跟踪任务,利于实现对多碎片群同时跟踪,系统架构简单,以较小代价获得更多的系统通道自由度。但由于天基雷达与空间碎片间的相对高速运动,接收不同回波信号时虚拟阵列相对目标位置呈阶梯形排布,传统的波束形成算法对目标角度等参数估计性能变得很差。本发明提出一种改进的波束形成算法,先将雷达相对碎片运动产生的虚拟阶梯形阵列中回波数据脉冲压缩后的频域表示校正为均匀线阵,然后将阵元间数据重新排列并逆傅里叶变换,最后利用波束形成算法对目标参数进行估计。仿真结果表明所提方法获得较好的测角性能。在天基tdm
‑
mimo雷达虚拟阵列发生阶梯形排布情况下能够在不损失自由度的前提下实现高精度测角,提高了天基tdm
‑
mimo雷达检测目标的性能。
[0049]
本发明未详细描述内容为本领域技术人员公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1