一种目标不携带设备的室内定位方法
1.本发明属于室内定位领域,特别涉及一种目标不携带设备的室内 精确定位方法。
背景技术:
2.定位在智能世界的构建过程中一直扮演着不可或缺的角色。根据 定位原理的不同,定位从大方向上被分为两类,一种是目标携带设备 的定位,另一种是免携带设备的定位。目标携带设备的定位即被检测 目标携带有可检测的电子设备并且主动参与定位活动。目标携带设备 的定位已经在某些领域有了成熟的应用。比如基于gps的定位技术在 车载和个人导航上已经有了很成功的应用;基于rfid的定位技术在 室内车辆定位领域也有了全面的发展等。但是目标携带设备的定位在 一些应用场景中却不适用,例如在银行的防盗检测中,我们不能期待 入侵者身上携带有可供检测的电子设备。在智能家居生活中,通过定 位人物位置,可以对智能台灯或者其他智能用电器进行控制,同样我 们不能要求客人携带有统一的可供识别的“身份牌”。因此,无设备 定位的概念应运而生并且引起了人们的研究兴趣。
3.免携带设备的定位是指被跟踪实体既不需要携带设备,也不需要 积极参与定位算法。有很多成熟的技术应用于无设备定位领域,包括 计算机视觉,无线电射频,雷达等。卷积神经网络的提出,大大加快 了计算机视觉的发展速度,目前已经实现了对视频中的目标物进行精 确定位和实时追踪的功能。但是计算机视觉有着明显的缺陷,比如在 光线较暗的夜晚或者雾天,定位性能会大打折扣而且无法隔墙进行目 标定位。基于雷达的定位可以克服以上技术的缺陷。但是使用雷达进 行精确定位则需要布置雷达阵,这样会导致更高的安装费用,不可能 将雷达定位系统安装在日常生活环境中。普及的wifi技术使得无线 基础架构随处可见,基于无线电技术来进行定位则无需修改当前的无 线基础架构。无线电在生活中无处不在,它无时无刻不在穿过我们的 身体。因此本篇文章探究在无线电网络中进行定位,以希望我们的方 法拥有更广阔的应用。
技术实现要素:
4.本发明的目的是提供一种目标不携带设备的室内精确定位方法, 该方法通过求解包含非凸稀疏正则化项的目标方程来得到一个稀疏 向量;采用一种联合分析计算的方法来预测目标的位置坐标。
5.本发明采用下述技术方案:
6.一种目标不携带设备的室内精确定位方法,包括以下步骤:
7.(1)获取目标在室内不同位置对无线电波的遮挡作用的量化数 据与目标所在位置的标签数据,并对该数据进行划分,得到训练样本 集和测试样本集;其中,训练样本集包括目标在不同位置上的接收无 线电数据和目标所在位置标签;
8.(2)对所有位置上的量化数据进行处理,将每个位置上的数据 都处理成一个列向量,将得到的所有列向量按照列拼接的方式构成一 个字典;
9.(3)构建目标方程,同时考虑对测试信号的线性拟合误差与正 则化项,进行迭代求解得到最终的稀疏向量;
10.(4)对稀疏向量中的几个极大值进行联合分析计算,得到目标 预测位置。
11.步骤(1)所述获取标签数据,并对数据进行划分的方法,包括 如下步骤:
12.1)将室内定位场景划分为相同大小的方形网格,每个网格表示 目标可能存在的位置,并对应着唯一的数字标签;
13.2)在一个监控区域周围布置有均匀分布的l个无线电接收传感 器,位置固定,配置一个无线电发射传感器,它有k个可变发射位置, 一个发射传感器和一个接收传感器之间的无线通信称为一组链路,整 个实验场景中一共有n=k*l组链路;
14.3)目标存在于室内中的某个位置,无线电发射传感器发送无线 电信号,所有接收传感器接收信号;发射传感器移动所有可选位置并 发射无线电信号,所有接收节点同时接收到达信号;然后,从每个链 路的频谱中提取信号强度作为有效信息,目标在每个位置上都会得到 一个信息矩阵,维度大小为l行k列;同时保存目标在每个网格位置 的数字标签信息,可以用来对应一个真实的二维位置坐标;
15.4)对采集到的数据集合以5:1的比例划分为训练样本集和测试 样本集。
16.步骤(2)所述列向量的拼接方法,包括如下步骤:
17.1)首先将目标在第一个位置上得到的信息矩阵转化为一个列向 量,维度大小为n,标签信息为1;
18.2)在第一个位置上重复测量τ次,分别转化为列向量后共得到 τ个列向量,标签信息为lab1={1,1,
…
,1};
19.3)重复步骤1)和2),直至收集完成目标在所有可选位置上的 数据;分别将每个位置上的列向量依次进行列拼接构成最终字典,对 字典的每个列进行二范数归一化,同时将对应的标签信息进行列拼接 构成标注信息。
20.步骤(3)所述构建目标方程和迭代求解的方法,包括如下步骤:
21.1)首先构造目标方程,目标方程应该包含两部分,即拟合误差 以及正则化项,目标方程为:
[0022][0023]
其中,y表示一个测试信号,w是字典矩阵,x是所求的稀疏向 量,表示引入的非凸gmc正则化; α,λ都是正的参数;z是一个辅助向量;
[0024]
2)由于目标个数总是远远小于网络格点的总个数,因此采用稀 疏编码的方法来求解稀疏向量,稀疏编码的求解可以采用前后向分裂 算法。
[0025]
步骤(4)所述对稀疏向量中的几个极大值进行联合分析计算的 方法,包括如下步骤:
[0026]
1)首先在求出稀疏向量x={x
1,1
,x
1,2
,
…
,x
1,τ
,x
2,1
,...x
s,τ
}后,x∈r
n
;将 每一个
稀疏向量的x系数进行求和即其中1≤p≤s,因此 得到x
*
={x1,...,x
p
,...x
s
},x
*
为得到预测为不同标签对应的权重向量,权 重越大,预测为当前位置的概率越大,并将x
*
中的元素按照降序排列;
[0027]
2)提取权重向量中的几个极大值,每个权重都对应一个不同的 位置标签,位置标签可以和二维坐标一一对应;
[0028]
3)将几个权重进行归一化,进行联合计算即可得到预测的目标 位置。
[0029]
进一步的,步骤3)所述的归一化处理方式及预测目标位置方法 是:
[0030]
归一化处理:首先将几个极大值向量按照进行归一化,其中,num为极大值的个数,即可得到归一化的权重;
[0031]
预测目标位置:通过下式来计算:其中,loc表 示最终目标的位置,a
i
表示位置i所对应的归一化权重,loc(i)表示 位置i所对应的真实二维坐标。
[0032]
本发明的优点是:使用稀疏编码的方法对室内定位模型进行建模, 在目标方程中不仅考虑了通过最小拟合误差来处理噪声,还通过引入 非凸正则化来更好的保证了所求稀疏向量的稀疏性,同时保持了目标 方程的凸性,便于快速求解;在得到稀疏向量之后,通过同时考虑几 个极大值的位置信息对目标的最终位置进行估计,能够对目标室内位 置进行有效预测,对智能家居控制,目标监控,银行防盗和智能医疗 等提供技术基础。
附图说明
[0033]
图1是本发明实施例提供的传感器网络的结构示意图;
[0034]
图2是本发明实施例提供的一种不携带设备的室内定位方法的 总体示意图;
[0035]
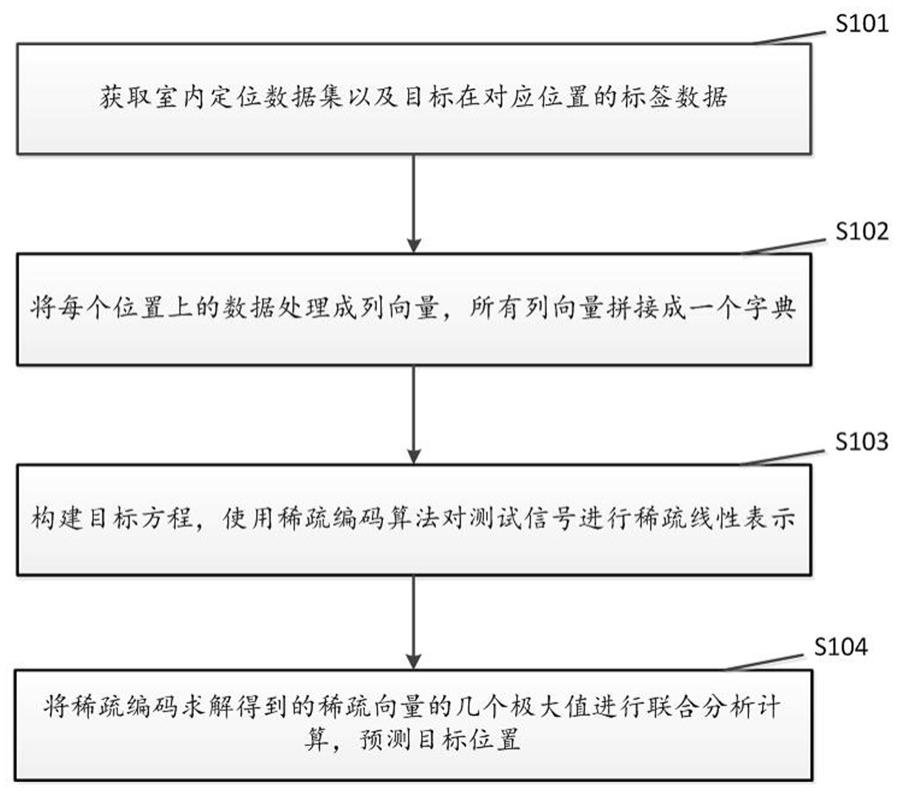
图3是本发明实施例提供的一种不携带设备的室内定位方法流 程示意图。
具体实施方式
[0036]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结 合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、 完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是 全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有 作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护 的范围。
[0037]
(如图1所示),本发明首先对室内定位环境进行了建模,由于 该环境中目标的个数总是远少于网格的总个数,因此,我们把定位问 题建模为一个稀疏编码的问题。首先收集到所有位置上的测试信号来 构成字典,对于采集的测试信号就可以通过稀疏编码的方式求得包含 定位信息的稀疏向量,最终使用联合分析计算的方法进行对目标位置 的预测。
[0038]
如图2
‑
3所示,本发明所述的不携带设备的室内定位方法,依次 包含以下步骤:
[0039]
s101、获取目标在室内不同位置对无线电波的遮挡作用的量化数 据与目标所在位置的标签数据,并对该数据进行划分得到训练样本集 和测试样本集;训练样本集包括目
标在不同位置上的接收无线电数据 和目标所在位置标签;具体包括以下步骤:
[0040]
s1011、将室内定位场景划分为相同大小的方形网格,每个网格 表示目标可能存在的位置,并对应着唯一的数字标签;
[0041]
s1012、在一个监控区域周围布置有均匀分布的l个无线电接收 传感器,位置固定,配置一个无线电发射传感器,它有k个可变发射 位置,一个发射传感器和一个接收传感器之间的无线通信称为一组链 路,整个实验场景中一共有n=k*l组链路;
[0042]
s1013、目标存在于室内中的某个位置,无线电发射传感器发送 无线电信号,所有接收传感器接收信号;发射传感器移动所有可选位 置并发射无线电信号,所有接收节点同时接收到达信号;然后,从每 个链路的频谱中提取信号强度作为有效信息,目标在每个位置上都会 得到一个信息矩阵,维度大小为l行k列;同时保存目标在每个网格 位置的数字标签信息,可以用来对应一个真实的二维位置坐标;
[0043]
s1014、对采集到的数据集合以5:1的比例划分为训练样本集和 测试样本集;
[0044]
s102、将所有位置上的量化数据进行处理,将每个位置上的数据 都处理成一个列向量,将得到的所有列向量按照列拼接的方式构成一 个字典;具体包括以下步骤:
[0045]
s1021、首先将目标在第一个位置上得到的信息矩阵转化为一个 列向量,维度大小为n,标签信息为1;
[0046]
s1022、在第一个位置上重复测量τ次,分别转化为列向量后共 得到τ个列向量,标签信息为lab1={1,1,
…
,1};
[0047]
s1023、重复步骤s1021和s1022,直至收集完成目标在所有可 选位置上的数据;分别将每个位置上的列向量依次进行列拼接构成最 终字典,同时将对应的标签信息进行列拼接构成标注信息;
[0048]
s103、构建目标方程,同时考虑对测试信号的线性拟合误差与正 则化项,进行迭代求解得到最终的稀疏向量;具体包括以下步骤:
[0049]
s1031、首先构造目标方程,目标方程应该包含两部分,即拟合 误差以及正则化项,目标方程为:
[0050][0051]
其中,y表示一个测试信号,w是字典矩阵,x是所求的稀疏向 量,表示引入的非凸gmc正则化; α,λ都是正的参数;z是一个辅助向量;
[0052]
s1032、因为目标个数总是远远小于网络格点的总个数,因此可 以采用稀疏编码的方法来求解稀疏向量,稀疏编码的求解可以采用前 后向分裂算法;
[0053]
s104、对稀疏向量中的几个极大值进行联合分析计算,得到目标 预测位置,具体包括以下具体步骤:
[0054]
s1041、首先在求出稀疏向量x={x
1,1
,x
1,2
,
…
,x
1,τ
,x
2,1
,
…
x
s,τ
}后,x∈r
n
; 将每一个稀疏向量的x系数进行求和即其中1≤p≤s,因 此得到x
*
={x1,
…
,x
p
,
…
x
s
},x
*
为得到预测为不同标签对应的权重向量, 权重越大,预测为当前位置的概率越大,并将x
*
中的元素按照降序排 列;
[0055]
s1042、提取权重向量中的几个极大值,每个权重都对应一个不 同的位置标签,位置标签可以和二维坐标一一对应;
[0056]
s1043、将几个权重进行归一化,进行联合计算即可得到预测的 目标位置。具体的方式是:
[0057]
首先将几个极大值向量按照进行归一化, 其中,num为极大值的个数,即可得到归一化的权重;
[0058]
预测目标的位置可以通过下式来计算:其中,loc 表示最终目标的位置,a
i
表示位置i所对应的归一化权重,loc(i)表 示位置i所对应的真实二维坐标。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1