扩展卡尔曼预测角度跟踪方法
1.本发明涉及到通信、雷达、测控等对目标角度跟踪有需求的领域,具体涉及到利用扩展卡尔曼预测器实现对目标角度的跟踪预测方法。
背景技术:
2.一般而言,为了实现地面雷达对空中目标角度的跟踪,例如地面雷达对航天飞行器角度的跟踪,我们需要知道目标的位置信息。在球坐标系下,目标的位置信息可以通过距离r、俯仰角θ
s
、方位角φ
s
来确定。但对于被动测角技术,雷达通过目标发射信号进行角度跟踪。在采用幅度和差单脉冲测角技术时,只能得到目标的俯仰角θ
s
和方位角φ
s
,无法得到目标到观测点的距离r。而现有卡尔曼的目标角度跟踪预测方法中,需要知道目标到观测点的距离r,从而导致卡尔曼预测器在目标角度跟踪的应用中受到限制。
3.针对现有目标角度跟踪方法需要距离r的问题,可以采用将目标角度所对应的单位矢量作为扩展卡尔曼预测器的观测量,通过扩展卡尔曼预测器迭代实现对目标的角度跟踪。
技术实现要素:
4.本发明要解决的问题是:如何在无法得知目标到观测点的距离r的情况下,利用扩展卡尔曼预测器实现对目标角度的跟踪。解决该技术问题的方法是一种扩展卡尔曼预测角度跟踪方法,其实现步骤是:
5.(1)采用同时多波束相控阵体制,阵面为均匀矩形面阵,位于xoy平面内,阵元个数m
×
n,阵元间距d为λ/2,λ表示来波信号的波长;根据相控阵天线基本原理,如果信号入射角度为(θ
s
,φ
s
),其接收信号可以用一个m
×
n维的矩阵表示
6.x(t)=s(t)v(θ
s
,φ
s
)+n(t)
7.其中,s(t)是坐标原点信号,信号方向矩阵v(θ
s
,φ
s
)为
[0008][0009]
n(t)为噪声矩阵,其矩阵元素对应m
×
n个加性高斯白噪声;
[0010]
(2)根据相控阵天线原理,在天线波束指向角度为(θ,φ)时,定义权值矩阵为
[0011][0012]
从而阵列天线的来波信号式中w
*
表示w的共轭,符号表示两个同阶矩阵的hadamard积,sum[]表示求矩阵所有元素的和;调整相控阵权值
矩阵,进行全空域电扫描,并采用功率估计的方法对来波信号粗捕获,获得来波信号的大致角度(θ0,φ0),并将(θ0,φ0)作为幅度和差单脉冲测角技术的跟踪轴指向角度;
[0013]
(3)采用同时多波束技术,以跟踪轴指向角度(θ0,φ0)为中心,构建四个独立对称子波束,子波束指向与跟踪轴指向的俯仰偏角均为θ
k
,方位偏角均为φ
k
,从而四个子波束对应权值矩阵为
[0014]
w1=w(θ0+θ
k
,φ0‑
φ
k
)
[0015]
w2=w(θ0+θ
k
,φ0+φk
k
)
[0016]
w3=w(θ0‑
θ
k
,φ0+φ
k
)
[0017]
w4=w(θ0‑
θ
k
,φ0‑
φ
k
)
[0018]
其中,第1个波束指向角度为(θ0+θ
k
,φ0‑
φ
k
),第2个波束指向角度为(θ0+θ
k
,φ0+φ
k
),第3个波束指向角度为(θ0‑
θ
k
,φ0+φ
k
),第4个波束指向角度为(θ0‑
θ
k
,φ0‑
φ
k
);
[0019]
(4)估计四个子波束的接收信号幅度,分别用e1、e2、e3、e4表示;和差处理得到和信号的幅度e
∑
=e1+e2+e3+e4,俯仰维的差信号幅度e
δθ
=e1+e2‑
e3‑
e4,以及方位维的差信号幅度e
δφ
=e1+e4‑
e2‑
e3;进一步处理得到俯仰维的差和比值s
θ
=e
δθ
/e
∑
,和方位维的差和比值s
φ
=e
δφ
/e
∑
;
[0020]
(5)根据幅度和差单脉冲测角技术原理,把差和比值s
θ
、s
φ
代入到公式法或者查表法中,得到目标的估计俯仰角和估计方位角
[0021]
(6)利用扩展卡尔曼预测器对进行预测:
[0022]
第一步,定义目标的状态矢量:
[0023][0024]
式中,x
n
、y
n
、z
n
分别表示目标在n时刻的实际位置,表示目标对应方向上的实际速度;
[0025]
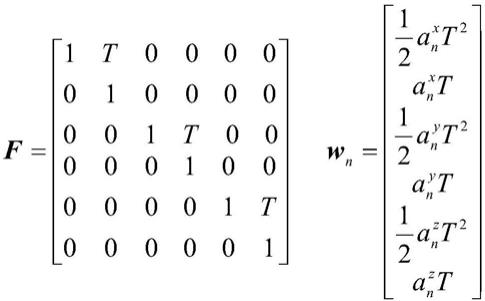
第二步,对目标的运动轨迹建模;采用基本的匀速直线运动模型,建立目标的状态方程
[0026][0027]
式中
[0028][0029]
f表示状态转移矩阵,w
n
表示过程噪声;t表示预测周期,分别表示x、y、z方向的伪加速度;
[0046][0047][0048]
其中,的表达式为
[0049][0050]
式中,x
n,n
‑1、y
n,n
‑1、z
n,n
‑1分别表示的第一个、第三个、第五个分量;根据测量矩阵h与h[]的关系:
[0051][0052]
则h的表达式为
[0053][0054]
③
预测:得到n时刻状态矢量的预测值及其对应的估计误差协方差矩阵的预测值p
n+1,n
[0055][0056]
p
n+1,n
=fp
n,n
f
t
+q
[0057]
第七步,把预测值作为扩展卡尔曼预测器输出,则n时刻的预测角度[θ
pre
(n),φ
pre
(n)]为
[0058][0059]
式中,x
n+1,n
、y
n+1,n
、z
n+1,n
分别表示的第一个、第三个、第五个分量;
[0060]
第八步,取n=n+1,重复执行第六步,并把n时刻的预测角度[θ
pre
(n),φ
pre
(n)]作
为幅度和差单脉冲测角技术的新的跟踪轴指向角度,使得θ0=θ
pre
(n),φ0=φ
pre
(n),就实现了目标扩展卡尔曼预测的角度跟踪。
[0061]
本发明的有益效果是,在无法得知观测点到目标距离r的情况下,也能够实现对目标角度的跟踪,算法简单。本发明可以运用到通信、雷达、测控等对目标角度跟踪有需求的领域。
附图说明
[0062]
图1是扩展卡尔曼预测角度跟踪方法系统框图;
[0063]
图2是相控阵均匀矩形面阵几何结构示意图;
[0064]
图3是扩展卡尔曼预测器迭代示意图。
具体实施方式
[0065]
首先建立相控阵均匀面阵模型,利用幅度和差单脉冲测角技术获得目标的估计俯仰角和估计方位角然后将测角角度所对应的单位矢量作为扩展卡尔曼预测器的观测信息,根据所建立的系统模型,完成对目标角度的预测跟踪。总体步骤如图1所示。具体实现步骤为:
[0066]
(1)如图2,采用同时多波束相控阵体制,阵面为均匀矩形面阵,位于xoy平面内,阵元个数m
×
n,阵元间距d为λ/2,λ表示来波信号的波长;根据相控阵天线基本原理,如果信号入射角度为(θ
s
,φ
s
),其接收信号可以用一个m
×
n维的矩阵表示
[0067]
x(t)=s(t)v(θ
s
,φ
s
)+n(t)
[0068]
其中,s(t)是坐标原点信号,信号方向矩阵v(θ
s
,φ
s
)为
[0069][0070]
n(t)为噪声矩阵,其矩阵元素对应m
×
n个加性高斯白噪声;
[0071]
(2)根据相控阵天线原理,在天线波束指向角度为(θ,φ)时,定义权值矩阵为
[0072][0073]
从而阵列天线的来波信号式中w
*
表示w的共轭,符号表示两个同阶矩阵的hadamard积,sum[]表示求矩阵所有元素的和;调整相控阵权值矩阵,进行全空域电扫描,并采用功率估计的方法对来波信号粗捕获,获得来波信号的大致角度(θ0,φ0),并将(θ0,φ0)作为幅度和差单脉冲测角技术的跟踪轴指向角度;
[0074]
(3)采用同时多波束技术,以跟踪轴指向角度(θ0,φ0)为中心,构建四个独立对称子波束;子波束指向与跟踪轴指向的俯仰偏角均为θ
k
,方位偏角均为φ
k
,从而四个子波束对应权值矩阵为
[0075]
w1=w(θ0+θ
k
,φ0‑
φ
k
)
[0076]
w2=w(θ0+θ
k
,φ0+φ
k
)
[0077]
w3=w(θ0‑
θ
k
,φ0+φ
k
)
[0078]
w4=w(θ0‑
θ
k
,φ0‑
φ
k
)
[0079]
其中,第1个波束指向角度为(θ0+θ
k
,φ0‑
φ
k
),第2个波束指向角度为(θ0+θ
k
,φ0+φ
k
),第3个波束指向角度为(θ0‑
θ
k
,φ0+φ
k
),第4个波束指向角度为(θ0‑
θ
k
,φ0‑
φ
k
);
[0080]
(4)估计四个子波束的接收信号幅度,分别用e1、e2、e3、e4表示;和差处理得到和信号的幅度e
∑
=e1+e2+e3+e4,俯仰维的差信号幅度e
δθ
=e1+e2‑
e3‑
e4,以及方位维的差信号幅度e
δφ
=e1+e4‑
e2‑
e3;进一步处理得到俯仰维的差和比值s
θ
=e
δθ
/e
∑
,和方位维的差和比值s
φ
=e
δφ
/e
∑
;
[0081]
(5)根据幅度和差单脉冲测角技术原理,把差和比值s
θ
、s
φ
代入到公式法或者查表法中,得到目标的估计俯仰角和估计方位角
[0082]
(6)利用扩展卡尔曼预测器对进行预测:
[0083]
第一步,定义目标的状态矢量:
[0084][0085]
式中,x
n
、y
n
、z
n
分别表示目标在n时刻的实际位置,表示目标对应方向上的实际速度;
[0086]
第二步,对目标的运动轨迹建模;采用基本的匀速直线运动模型,建立目标的状态方程
[0087][0088]
式中
[0089][0090]
f表示状态转移矩阵,w
n
表示过程噪声;t表示预测周期,分别表示x、y、z方向的伪加速度;
[0091]
第三步,定义状态矢量的估计误差协方差矩阵,
[0092][0093]
其中,符号e[]表示求随机变量均值;
[0094]
第四步,定义0时刻初始化状态,具体定义四个参数:状态矢量x
n
的估计值估
计误差协方差矩阵p
0,0
,状态噪声的协方差矩阵q,测量噪声的协方差矩阵r;其中,和p
0,0
根据目标运动状态的经验信息设定;
[0095][0096]
其中,为三个方向的伪加速度对应的方差,a的表达式为
[0097][0098]
r通常为一个单位阵;
[0099]
第五步,根据状态预测方程和估计误差预测方程得到0时刻的状态预测值和估计误差协方差矩阵的预测值p
1,0
,其预测方程分别为
[0100][0101]
p
1,0
=fp
0,0
f
h
+q
[0102]
第六步,如图3,第n次迭代过程为
[0103]
①
测量:按照(3)
‑
(5)的步骤,获得n时刻的估计俯仰角和方位角得到n时刻的测量值z
n
,即
[0104][0105]
②
更新估计:根据n
‑
1时刻估计误差协方差矩阵的预测值p
n,n
‑1和测量噪声的协方差矩阵r计算卡尔曼增益k
n
,再由n
‑
1时刻状态矢量的预测值和n时刻的测量值z
n
,得到n时刻的状态矢量的更新值最后得到估计误差协方差矩阵的更新值p
n,n
,其更新公式分别为
[0106]
k
n
=p
n,n
‑1h
t
(hp
n,n
‑1h
t
+r)
‑1[0107][0108][0109]
其中,的表达式为
[0110][0111]
式中,x
n,n
‑1、y
n,n
‑1、z
n,n
‑1分别表示的第一个、第三个、第五个分量;根据测量矩阵h与h[]的关系:
[0112][0113]
则h的表达式为
[0114][0115]
③
预测:得到n时刻状态矢量的预测值及其对应的估计误差协方差矩阵的预测值p
n+1,n
[0116][0117]
p
n+1,n
=fp
n,n
f
t
+q
[0118]
第七步,把预测值作为扩展卡尔曼预测器的输出,则n时刻的预测角度[θ
pre
(n),φ
pre
(n)]为
[0119][0120]
式中,x
n+1,n
、y
n+1,n
、z
n+1,n
分别表示的第一个、第三个、第五个分量;
[0121]
第八步,取n=n+1,重复执行第六步,并把n时刻的预测角度[θ
pre
(n),φ
pre
(n)]作为幅度和差单脉冲测角技术的新的跟踪轴指向角度,使得θ0=θ
pre
(n),φ0=φ
pre
(n),就实现了目标扩展卡尔曼预测的角度跟踪。
[0122]
本发明能够在无法得知观测点到目标距离r的情况下,实现对目标角度跟踪;本发明可以应用于通信、雷达、测控等对目标角度跟踪有需求的领域。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1