一种双柔性关节驱动的开孔柔性板振动测控装置及方法
1.本发明涉及柔性板振动控制领域,具体涉及一种双柔性关节驱动的开孔柔性板振动测控装置及方法。
背景技术:
2.人类自工业革命以来,自动制造技术已经越来越发达。自动制造离不开机械手,这些机械板笨重,视为刚性连杆机械手。然而,在近代以来,为了提高工作效率或者减少能源的浪费亦或者进行精密制造,机械板的轻量化设计都越发重要。减少机械板的横截面积、或者采用镂空结构都是进行轻量化设计的方法。当机械板轻量化的时候,机械板将具有柔性的特点,在运动时会面临振动等不利于生产制造的问题。
3.伺服电机响应快、运动精度高、易驱动,既可以用来驱动柔性板的运动,也可以用来抑制柔性板的振动。
4.压电式致动器安装简易、质量轻、体积小,可以用来抑制柔性板的振动。
技术实现要素:
5.为了克服现有技术存在的缺点与不足,本发明的首要目的是提供一种双柔性关节驱动的开孔柔性板振动测控装置,可以更加全面的研究两个柔性关节驱动下的开孔柔性板的振动特性。
6.本发明的次要目的是提供一种双柔性关节驱动的开孔柔性板振动测控方法。
7.本发明采用如下技术方案:
8.一种双柔性关节驱动的开孔柔性板振动测控装置,包括柔性板本体部分及控制部分。
9.柔性板本体部分,包括开孔柔性板,所述开孔柔性板的上、下端分别通过柔性关节与传动部件连接,所述开孔柔性板上粘贴压电陶瓷传感器、压电致动器及加速度传感器;
10.控制部分,根据压电陶瓷传感器及加速度传感检测开孔柔性板的振动信号,得到控制量,分别输出压电致电器及传动部件,用于抑制开孔柔性板的振动。
11.进一步,所述柔性关节有两个,且结构相同,包括套筒、第一圆锥滚子轴承、转轴、第二圆锥滚子轴承、端盖、联轴器及两个扭簧,具体连接为:第一圆锥滚子轴承的外圈设置在套筒内壁的凸台,第二圆锥滚子轴承的外圈设置在端盖的凸台上,第一圆锥滚子轴承和第二圆锥滚子轴承的内圈设置在转轴的轴肩上,端盖与套筒固定,两个扭簧的一端嵌入套筒内壁的槽内,另一端嵌入转轴的槽内,两个扭簧安装的旋向相反。
12.进一步,所述传动部件包括伺服电机、减速器及伺服电机驱动器,所述减速器的输入端与伺服电机连接,减速器的输出端与柔性关节连接,伺服电机驱动器接收控制部分的信号,驱动伺服电机旋转。
13.进一步,所述开孔柔性板开有三个方形孔,设置在开孔柔性板宽度方向的中线上,三个方形孔间隔距离相等。
14.进一步,所述压电陶瓷传感器有两片,分别设置在柔性板横向中线的上方及下方,靠近固定端,姿态角度为0
°
,且单面粘贴;
15.所述加速度传感器有一个,设置在开孔柔性板的自由端。
16.进一步,套筒内壁设有不同尺寸的第一槽及第二槽,所述第一槽在内壁上设置三个,间隔120
°
呈圆周分布;
17.所述第二槽在内壁上设置三个,间隔120
°
,呈圆周分布,相邻第一槽及第二槽在内壁上间隔60
°
。
18.进一步,所述转轴设有两种不同的尺寸的第一槽及第二槽,两种槽间隔180
°
分布。
19.进一步,所述两个扭簧安装的旋向相反,具体为:
20.两个扭簧位于两个圆锥滚子轴承之间,其中靠近第一圆锥滚子轴承一侧的扭簧的旋向为逆时针,靠近第二圆锥滚子轴承一侧的扭簧的旋向为顺时针。
21.进一步,所述控制部分包括计算机、运动控制卡、端子板、电荷放大器及压电放大电路,所述端子板与运动控制卡相互连接,所述运动控制卡与计算机相互连接,所述端子板分别与电荷放大器、压电放大电路及伺服电机驱动器连接。
22.一种开孔柔性板振动测控装置的方法,包括:
23.第一步:利用压电陶瓷传感器以及加速度传感器将检测的柔性板的振动信息;
24.第二步,见第一步所得到的信号信息通过端子板传入运动控制卡中,通过运动控制卡传进计算机伺服电机、伺服电机自带的编码器可将自身的运动信息通过端子板传入运动控制卡中,通过运动控制卡传进计算机,计算机根据传入的信号进行相应的控制算法输出控制量,经过运动控制卡传到端子板,然后端子板将这些信号传给伺服电机驱动器,进而控制伺服电机、伺服电机的转动,带减速器的转动,以达到控制开孔柔性板运动的目的;
25.第三步:计算机根据传入的信号进行相应的控制算法输出控制量,经过运动控制卡传到端子板,然后端子板将这些信号传给压电放大电路发大信号,输出到压电致动器上,用于抑制开孔柔性板的振动;同时,端子板也将这些信号传给伺服电机驱动器,进而控制伺服电机、伺服电机的转动,带动减速器的转动,以达到控制开孔柔性板运动的目的。
26.本发明的有益效果:
27.(1)本发明采用两个柔性关节,所述柔性关节通过具体设计的套筒、圆锥滚子轴承、转轴、扭簧、圆锥滚子轴承、端盖及联轴器装配形成,该柔性关节采用两个相互预紧的扭簧,正反转都具有柔性的效果;
28.(2)套筒上设置两种几何尺寸不同,呈圆周分布的孔槽,可以与转轴、扭簧一起得到不同弹簧预紧力的柔性关节,可以更加全面地研究不同扭簧预紧力对于开孔柔性板的振动模态的影响。
29.(3)本发明开孔柔性板中开孔可以采用不同尺寸,可以更加全面地研究具有在两个柔性关节驱动下的开孔柔性板的振动特性;
30.(4)本发明采用双伺服电机以及压电致动器的振动控制方法,可以更加全面地抑制开孔柔性板的振动;
31.(5)本发明采用多种类型传感器来获取开孔柔性板的振动信号,以减少检测误差。
附图说明
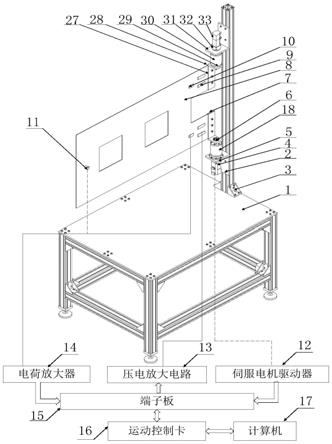
32.图1是本发明的总体结构示意图;
33.图2是图1的主视图;
34.图3是图1的左视图;
35.图4是图1的俯视图;
36.图5是图1中柔性关节的结构示意图;
37.图6是图1中套筒的结构示意图;
38.图7是图5中扭转弹簧结构示意图;
39.图8是图5中转轴结构示意图;
40.图9是本发明的振动控制流程图。
具体实施方式
41.下面结合实施例及附图,对本发明作进一步地详细说明,但本发明的实施方式不限于此。
42.实施例
43.如图1
‑
图4所示,一种双柔性关节驱动的开孔柔性板振动测控装置,包括柔性板本体部分及控制部分。
44.所述柔性板本体部分包括开孔柔性板8、柔性板装夹座6、27及小夹板7、28,所述开孔柔性板的上端及下端分别通过小夹板7、28与柔性板装夹座6、27连接,所述柔性板装夹座6、27分别与两个柔性关节连接,两个柔性关节分别与两个传动部件连接,所述传动部件固定在支架3上,支架固定在实验台1上。
45.所述传动部件有两个,包括减速器连接台2、31,伺服电机4、33,减速器5、32及伺服电机驱动器12。所述减速器5固定在减速器连接台2上,伺服电机4和减速器5底端相互连接,减速器连接台与减速器4上端的轴相互连接,柔性关节与减速器连接台5通过圆柱销相互连接。
46.如图5所示,进一步,两个柔性关节结构相同,位于下端的柔性关节均包括套筒18、第一圆锥滚子轴承19、转轴20、两个扭簧21、22、第二圆锥滚子轴承23、端盖24、螺钉25及联轴器26。
47.第一圆锥滚子轴承19的外圈通过套筒18内壁的凸台进行定位和安装,第二圆锥滚子轴承23的外圈通过套端盖24的凸台进行定位和安装,第一圆锥滚子轴承19和第二圆锥滚子轴承23的内圈通过转轴20的轴肩进行定位和固定,端盖24和套筒18通过螺钉25进行固定。经过此方法,转轴20、套筒18、端盖24、第一圆锥滚子轴承19和第二圆锥滚子轴承23的径向位置相互确定。扭簧21、扭簧22的一端嵌入套筒18内壁的槽内,另一端嵌入转轴20的槽内,两个扭簧安装的旋向相反。所述套筒与减速器连接台5相互连接。
48.所述的扭簧21距离套筒18的内侧底部35mm处,扭簧22距离套筒18的内侧底部45mm处,扭簧21、扭簧22水平安装。
49.位于上端的柔性关节结构与下端的相同,图1只示出端盖29和套筒30。
50.如图7所示,两个扭簧安装的旋向相反,具体为:
51.安装位置位于第一圆锥滚子轴承和第二圆锥滚子轴承之间,其中靠近第一圆锥滚
子轴承一侧的扭簧21的旋向为逆时针,靠近第二圆锥滚子轴承一侧的扭簧22的旋向为顺时针。扭簧21、扭簧22预紧后安装。
52.如图6所示,为了调整扭簧的预紧力,套孔18内壁设有两种不同尺寸的第一槽及第二槽,用于设置两个扭簧,第一槽的几何尺寸是25mm
×
7mm
×
2.6mm,第二槽的几何尺寸是35mm
×
7mm
×
2.6mm。第一槽底部距离内侧底部45mm处,第二槽底部距离内侧底部35mm处。
53.第一槽内壁上有三个,间隔120
°
呈圆周分布。第二槽在内壁上有三个,间隔120
°
呈圆周分布。第一槽及第二槽在内壁上之间相距60
°
。
54.如图8所示,所述的转轴20上有两种孔槽,一个槽的几何尺寸是15mm
×
2mm
×
2.6mm,一个槽几何尺寸是5mm
×
2mm
×
2.6mm,两种孔槽之间相距180
°
。套筒顶部有六个m6的螺纹孔。
55.为了对开孔柔性板进行振动测量及振动抑制,开孔柔性板上设置压电陶瓷传感器、加速度传感器及压电致动器。
56.本实施例中的开孔柔性板设置三个方形孔,三个方形孔均匀设置在开孔柔性板的横向中线上。与柔性关节连接的一侧称为固定端,另一侧为自由端。
57.压电陶瓷传感器10安装在梁宽度方向的中线位置且距离开孔柔性板的固定端100mm的位置,按照姿态角度为0
°
单面粘贴,在开孔柔性板上下各安装1片,一共2片。
58.所述的加速度传感器11梁宽度方向的中线位置且距离开孔柔性板的自由端80mm的位置,总计1个。
59.所述压电致动器9为八片,设置在开孔柔性板横向中线的上方及下方,分别粘贴两片,双面安装。
60.控制部分包括一是伺服电机运动控制部分,二是压电致动振动控制部分。
61.其中,伺服电机运动控制部分中,伺服电机33、伺服电机4通过伺服电机驱动器12与端子板15相连,端子板15与运动控制卡16相连,伺服电机33、伺服电机4自带的编码器可将自身的运动信息通过端子板15传入运动控制卡16中,通过运动控制卡16传进计算机17,计算机17根据传入的信号进行相应的控制算法输出控制量,经过运动控制卡16传到端子板15,然后端子板15将这些信号传给伺服电机驱动器12,进而控制伺服电机33、伺服电机4的转动,带动减速器的转动,以达到控制开孔柔性板8运动的目的。
62.对于压电致动振动控制部分,压电陶瓷传感器10以及加速度传感器11将自身的检测的信息通过输入电荷放大器14,进一步输入端子板15后传入运动控制卡16中,通过运动控制卡16传进计算机17,计算机17根据传入的信号进行相应的控制算法输出控制量,经过运动控制卡16传到端子板15,然后端子板15将这些信号传给压电放大电路13放大信号,输出到压电致动器9上,用于抑制开孔柔性板8的振动。
63.如图9所示,本发明的控制过程如下:
64.第一步:利用压电陶瓷传感器以及加速度传感器检测柔性臂的振动信息;
65.第二步,将第一步所得到的信号信息通过端子板传入运动控制卡中,通过运动控制卡传进计算机,伺服电机、伺服电机自带的编码器可将自身的运动信息通过端子板传入运动控制卡中,通过运动控制卡传进计算机。计算机根据传入的信号进行相应的控制算法输出控制量,经过运动控制卡传到端子板,然后端子板将这些信号传给伺服电机驱动器,进而控制伺服电机、伺服电机的转动,带减速器的转动,以达到控制开孔柔性板运动的目的。
66.第三步:计算机根据传入的信号进行相应的控制算法输出控制量,经过运动控制卡传到端子板,然后端子板将这些信号传给压电放大电路放大信号,输出到压电致动器上,用于抑制开孔柔性板的振动。同时,端子板也将这些信号传给伺服电机驱动器,进而控制伺服电机、伺服电机的转动,带动减速器的转动,以达到控制开孔柔性板运动的目的。
67.第四步:通过改变控制参数,反复试验,获取多次实验结果,得到双柔性关节驱动的开孔柔性板振动测控装置及方法的振动特性以及控制效果。
68.图1中的虚线为电信号在各部件之间的流向。
69.在本实施例中,开孔柔性板的材料为环氧树脂,其几何尺寸为1200mm
×
600mm
×
2mm,开孔区域为200mm
×
200mm
×
2mm。弹性模量为e=34.64gpa,密度为ρ=1840kg/m3。
70.压电陶瓷传感器的材料为压电陶瓷,尺寸为40mm
×
20mm
×
1mm粘贴在梁宽度方向的中线位置且距离开孔柔性板的固定端100mm的位置,按照姿态角度0
°
单面粘贴,在开孔柔性板上下各安装1片,一共2片,压电陶瓷材料的弹性模量为e
p
=63gpa,d31=166pm/v。
71.压电致动器安装在柔性臂两侧中央固定端80mm的地方,柔性板的上下臂两侧按照姿态角度0
°
各安装2片,双面安装,一共8片。
72.实验台由四种长度为600mm,980mm,680mm和1500mm的铝型材通过角铁组装而成,实验台端面为一块800mm
×
600mm
×
8mm的铝合金板,通过螺钉与铝型材固定。
73.加速度传感器选用kistler公司型号为8310b2的电容式传感器,其标称灵敏度为1000mv/g,测量频率范围为0
‑
250hz。
74.伺服电机选用三菱电机公司型号为hc
‑
kfs43的交流伺服电机,其功率和最大转速为400w和3000r/min;伺服电机驱动器选用三菱公司型号为mr
‑
j2s
‑
40a的伺服驱动器;减速器选用日本力新宝vrsf
‑
25c
‑
14bb14减速器,其减速比为1:25,背隙为15角分。
75.圆锥滚子轴承选用nsk公司的hr320/22xj,外径为44mm,内径为22mm,宽度为15mm。
76.电荷放大器选用江苏联能电子有限公司的ye5850型电荷放大器;压电放大电路选用型号为apex
‑
pa241dw的压电放大器,其放大倍数可以达到52倍,可以将
‑
5v~+5v放大到
‑
260v~+260v。
77.运动控制卡选用固高公司的guc
‑
800
‑
tpv
‑
m23
‑
l2
‑
f8g型号的控制卡,8路可控轴数可提供范围为
‑
10v~+10v的模拟量输入和输出;选用的计算机cpu型号为pentium g620 2.6ghz,内存4g,主板中有pci接口,可安装运动控制卡。
78.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受所述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1