一种箭遥信号极化合成方法及系统与流程
1.本发明涉及信号合成领域,特别是涉及一种箭遥信号极化合成方法及系统。
背景技术:
2.在长、中、短波测向中,大多数以接收垂直极化波的天线体系来测向,这种测向机对于具有任意极化角和波前倾角的无线电波进行测向时,会同时对垂直极化波和水平极化波产生接收由于所用的天线体系对垂直分量和水平分量接收的方向特性图是不相同的,因此其合成方向特性图会发生畸变,从而产生测向误差,这种误差称为极化误差;
3.为减少误差带来的影响,亟需一种箭遥信号极化合成方法及系统。
技术实现要素:
4.针对上述问题,本发明提供了一种箭遥信号极化合成方法及系统,具有降低误差影响,确保极化合成后得到的数据准确的优点。
5.本发明的技术方案是:
6.一方面,本发明提供了一种箭遥信号极化合成方法,包括以下步骤:
7.s1、输入左旋信号,形成左旋跟踪链路解调左旋角误差电压信号,输入右旋信号,形成右旋跟踪链路解调右旋角误差电压信号;
8.s2、对左旋角误差电压信号和右旋角误差电压信号进行极化合成;
9.s3、将极化合成的角误差电压信号输送至伺服分机单元,同时输出低频调制方波信号至调至单元,对差信号进行调制。
10.在进一步的技术方案中,步骤s1中,如果左旋信号和右旋信号为宽带信号,则根据系统要求对卫星下行的rhcp单极化、lhcp单极化和rhcp+lhcp双极化三种信号跟踪,并对应增加左旋跟踪链路、右旋跟踪链路和双极跟踪链路,并分别在左旋跟踪链路及右旋跟踪链路解调出误差信息后,再进行步骤s2所述的极化合成。
11.在进一步的技术方案中,步骤s1中,还包括步骤:
12.用方波信号与左旋信号或右旋信号正交鉴相,判断左旋信号或右旋信号的相位值是否正常,如果正常,则进行步骤s1,否则,结束。
13.在进一步的技术方案中,步骤s2中,包括以下步骤:
14.s21、根据0/π信号的调制与解调将左旋角误差电压信号和右旋角误差电压信号经幅度加权后分别得到上限左旋误差电压信号、上限右旋误差电压信号和下限左旋误差电压信号、下限右旋误差电压信号;
15.s22、将左旋信号的差路信号和右旋信号的差路信号经权系数计算和幅度加权后分别得到上限左旋差路信号、上限右旋差路信号和下限左旋差路信号、下限右旋差路信号;
16.s23、极化合成:将上限左旋误差电压信号、上限右旋误差电压信号、上限左旋差路信号和上限右旋差路信号合成方位角误差并输出方位角误差电压;将下限左旋误差电压信号、下限右旋误差电压信号、下限左旋差路信号和下限右旋差路信号合成俯仰角误差并输
出俯仰角误差电压。
17.在进一步的技术方案中,步骤s2中,极化合成的算法如下:
18.(s
o
/n
o
)2=(s
a
/n
a
)2+(s
b
/n
b
)219.式中s
a
和s
b
分别为左旋跟踪链路的信号电压值和噪声电压值,n
a
和n
b
分别是右旋接收系统输入端的信号电压值和噪声电压值。
20.在进一步的技术方案中,在极化合成之前还包括步骤:
21.根据0/π信号的调制与解调对左旋输入和右旋输入分别进行加权,合成输出公式为:
22.u0(t)=c
a
×
u
a
(t)+c
b
×
u
b
(t)
23.式中u0(t)为左右旋信号合成后的信号,c
a
为左旋和路信号幅度,u
a
(t)为左旋和差信号合成以后的信号,c
b
为右旋和路信号幅度,u
b
(t)为右旋和差信号合成以后的信号。
24.在进一步的技术方案中,步骤s1中,左旋信号和右旋信号还分别送至和差通道合成模块,形成单通道角跟踪通道。
25.在进一步的技术方案中,步骤s3中,还包括将左旋角误差电压信号和右旋角误差电压信号以及左旋角误差电压信号和右旋角误差电压信号极化合成后的合成信号发送至数据控制开关模块。
26.另一方面,本发明还提供了一种箭遥信号极化合成系统,包括左旋agc单元、右旋agc单元、左旋跟踪接收单元、右旋跟踪接收单元和极化合成单元;
27.所述左旋agc单元的信号输出端与左旋跟踪接收单元的第一信号输入端连接,所述左旋跟踪接收单元的第一信号输出端与极化合成单元的第一信号输入端连接,所述极化合成单元的第一信号输出端与左旋跟踪单元的第二信号输入端连接,所述左旋跟踪接收单元的第二信号输出端连接有调至单元的信号输入端连接;
28.所述右旋agc单元的信号输出端与右旋跟踪接收单元的第一信号输入端连接,所述右旋跟踪接收单元的第一信号输出端与极化合成单元的第二信号输入端连接,所述极化合成单元的第二信号输出端与右旋跟踪单元的第二信号输入端连接,所述右旋跟踪接收单元的第二信号输出端连接有调至单元的信号输入端连接;
29.所述极化合成单元的第三信号输出端连接有伺服分机单元的信号输入端。
30.在进一步的技术方案中,该系统还包括监控处理板;
31.所述监控处理板的第一信号输出端与左旋跟踪接收单元的第三信号输入端连接,所述监控处理板的第一信号输入端与左旋跟踪接收单元的第三信号输出端连接,所述监控处理板的第二信号输出端与右旋跟踪接收单元的第三信号输入端连接,所述监控处理板的第二信号输入端与右旋跟踪接收单元的第三信号输出端连接;
32.所述监控处理板的第三信号输出端与极化合成单元的第三信号输入端连接,所述监控处理板的第三信号输入端与极化合成单元的第三信号输出端连接。
33.本发明的有益效果是:
34.1、极化合成提高输出信号电平,当存在噪声时可提高输出信噪比,在最佳合成状态,两路信号同相相加,信号按电压倍数增涨,噪声合成只能按功率倍数增涨,结果信号功率的增比大于噪声功率的增比,使合成输出信噪比增加;
35.2、为了最大限度的利用差路信号,克服低仰角下的多径效应,把差路信号的左、右
旋进行极化合成,合成前利用数字移相使左、右旋信号相位一致,再用agc信息进行最佳数字合成;
36.3、极化合成的左旋或右旋通道在出现故障时起了互为备份的作用。
附图说明
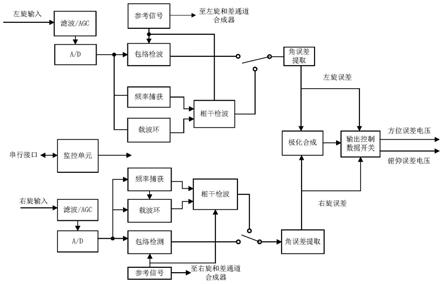
37.图1是本发明实施例所述箭遥信号极化合成方法的原理图;
38.图2是本发明实施例所述误差输出原理图;
39.图3是本发明实施例所述极化合成框图;
40.图4是本发明实施例所述箭遥信号极化合成系统。
41.附图标记说明:
42.1、左旋agc单元;2、右旋agc单元;3、左旋跟踪接收单元;4、右旋跟踪接收单元;5、极化合成单元;6、监控处理板。
具体实施方式
43.下面结合附图对本发明的实施例作进一步说明。
44.实施例:
45.如图1所示,一种箭遥信号极化合成方法,包括以下步骤:
46.s1、输入左旋信号,形成左旋跟踪链路解调左旋角误差电压信号,输入右旋信号,形成右旋跟踪链路解调右旋角误差电压信号;其中,左旋跟踪链路和右旋跟踪链路分别在左旋跟踪接收单元3、右旋跟踪接收单元4内完成,左旋跟踪接收单元3、右旋跟踪接收单元4结构相同,便于维护时更换,跟踪接收单元完成70mhz(可根据使用需求对调制频率做修改)输入信号放大、相关及非相关agc、频率引导、防边带错锁、载波捕获与跟踪,下行通道跟踪信号的归一化、检测输出方位、俯仰角误差信号;
47.s2、对左旋角误差电压信号和右旋角误差电压信号进行极化合成;
48.s3、将极化合成的角误差电压信号输送至伺服分机单元,同时输出低频调制方波信号至调至单元,对差信号进行调制;
49.左旋跟踪接收单元3、右旋跟踪接收单元4构成跟踪接收机,跟踪接收机采用单通道单脉冲角跟踪体制,跟踪接收机输入信号为和差信号通道合并后的信号,含有低频幅度调制,调幅的调制深度反应了差信号的强弱,将调幅波解调出来后就可提取角误差信息。
50.在另外一个实施例中,如果左旋信号和右旋信号为宽带信号,则根据系统要求对卫星下行的rhcp单极化、lhcp单极化和rhcp+lhcp双极化三种信号跟踪,并对应增加左旋跟踪链路、右旋跟踪链路和双极跟踪链路,并分别在左旋跟踪链路及右旋跟踪链路解调出误差信息后,再进行步骤s2所述的极化合成;
51.跟踪接收机对输入的70mhz信号通过滤波变频后,在70mhz中频数字化,能同时对窄带信号和宽带信号进行跟踪解调,跟踪接收机采用了两级agc结构,可以共同实现70db(也可为其它的db数值)的agc动态范围。
52.在另外一个实施例中,步骤s1中,还包括步骤:
53.用方波信号与左旋信号或右旋信号正交鉴相,判断左旋信号或右旋信号的相位值是否正常,如果正常,则进行步骤s1,否则,结束。
54.在另外一个实施例中,如图2所示,步骤s2中,包括以下步骤:
55.s21、根据0/π信号的调制与解调将左旋角误差电压信号和右旋角误差电压信号经幅度加权后分别得到上限左旋误差电压信号、上限右旋误差电压信号和下限左旋误差电压信号、下限右旋误差电压信号;
56.s22、将左旋信号的差路信号和右旋信号的差路信号经权系数计算和幅度加权后分别得到上限左旋差路信号、上限右旋差路信号和下限左旋差路信号、下限右旋差路信号;
57.s23、极化合成:将上限左旋误差电压信号、上限右旋误差电压信号、上限左旋差路信号和上限右旋差路信号合成方位角误差并输出方位角误差电压;将下限左旋误差电压信号、下限右旋误差电压信号、下限左旋差路信号和下限右旋差路信号合成俯仰角误差并输出俯仰角误差电压。
58.在另外一个实施例中,步骤s2中,极化合成的算法如下:
59.(s
o
/n
o
)2=(s
a
/n
a
)2+(s
b
/n
b
)2;
60.在最佳合成状态,合成输出信噪比等于两路信噪比之和。
61.式中s
a
和s
b
分别为左旋跟踪链路的信号电压值和噪声电压值,n
a
和n
b
分别是右旋接收系统输入端的信号电压值和噪声电压值;
62.极化合成可提高输出信号电平,当存在噪声时可提高输出信噪比,在最佳合成状态,两路信号同相相加,信号按电压倍数增涨,噪声合成只能按功率倍数增涨,结果信号功率的增比大于噪声功率的增比,使合成输出信噪比增加。
63.在另外一个实施例中,如图3所示,在极化合成之前还包括步骤:
64.根据0/π信号的调制与解调对左旋输入和右旋输入分别进行加权,合成输出公式为:
65.u0(t)=c
a
×
u
a
(t)+c
b
×
u
b
(t)
66.式中u0(t)为左右旋信号合成后的信号,c
a
为左旋和路信号幅度,u
a
(t)为左旋和差信号合成以后的信号,c
b
为右旋和路信号幅度,u
b
(t)为右旋和差信号合成以后的信号。
67.在另外一个实施例中,如图1所示,步骤s1中,左旋信号和右旋信号还分别送至和差通道合成模块,形成单通道角跟踪通道。
68.在另外一个实施例中,如图2所示,步骤s3中,还包括将左旋角误差电压信号和右旋角误差电压信号以及左旋角误差电压信号和右旋角误差电压信号极化合成后的合成信号发送至数据控制开关模块;
69.跟踪链路时,将左旋跟踪链路得出角误差信息与右旋跟踪链路得出角误差信息分别送至极化合成处理模块及数据控制开关模块;左右旋误差信息极化合成一路误差信息后,也送至数据控制开关模块;数据控制开关模块在监控单元的控制下,其中监控单元包括监控处理板6和监控计算机,从三路误差信息中选择其中一路送至伺服分机。
70.在另外一个实施例中,如图4所示,一种箭遥信号极化合成系统,包括左旋agc单元1、右旋agc单元2、左旋跟踪接收单元3、右旋跟踪接收单元4和极化合成单元5;
71.所述左旋agc单元1的信号输出端与左旋跟踪接收单元3的第一信号输入端连接,所述左旋跟踪接收单元3的第一信号输出端与极化合成单元5的第一信号输入端连接,所述极化合成单元5的第一信号输出端与左旋跟踪单元的第二信号输入端连接,所述左旋跟踪接收单元3的第二信号输出端连接有调至单元(图中未示出)的信号输入端连接;
72.所述右旋agc单元2的信号输出端与右旋跟踪接收单元4的第一信号输入端连接,所述右旋跟踪接收单元4的第一信号输出端与极化合成单元5的第二信号输入端连接,所述极化合成单元5的第二信号输出端与右旋跟踪单元的第二信号输入端连接,所述右旋跟踪接收单元4的第二信号输出端连接有调至单元(图中未示出)的信号输入端连接;
73.所述极化合成单元5的第三信号输出端连接有伺服分机单元的信号输入端;
74.极化合成单元5输出模拟电压(a、e、agc)及锁定指示等信号至伺服分机,由伺服分机按照任务需要选择一路单元的输出信号与天伺馈一同构成伺服环路,完成目标飞行器的角度跟踪。
75.在另外一个实施例中,如图4所示,该系统还包括监控处理板6;
76.所述监控处理板6的第一信号输出端与左旋跟踪接收单元3的第三信号输入端连接,所述监控处理板6的第一信号输入端与左旋跟踪接收单元3的第三信号输出端连接,所述监控处理板6的第二信号输出端与右旋跟踪接收单元4的第三信号输入端连接,所述监控处理板6的第二信号输入端与右旋跟踪接收单元4的第三信号输出端连接;
77.所述监控处理板6的第三信号输出端与极化合成单元5的第三信号输入端连接,所述监控处理板6的第三信号输入端与极化合成单元5的第三信号输出端连接。
78.以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1