海德汉绝对式光栅尺解码方法及系统
1.本发明涉及一种海德汉绝对式光栅尺解码方法及系统。
背景技术:
2.海德汉绝对式光栅尺数据是按照endat2.2格式进行传输,由于原厂配置的后续数据处理模块价格昂贵、采样频率低,所以选用fpga对光栅尺反馈信号按照endat2.2格式对光栅尺进行指令输入以及信号解码。以16位位置信息光栅尺为例,其位置信息按二进制排列。在fpga中传统解码方式是将采集到的位置信息依照采集顺序i,按照2
i
与对应的数字信号x(1、0)相乘。每采集到一个数字信号进行一次计算,最终将n位数字信号计算结果相加与分辨率k相乘得到准确位置值pos。计算公式如下:
[0003][0004]
此方法虽然能够准确解算出光栅尺位置值,但在不做延时补偿的控制系统中,与海德汉绝对式光栅尺的信息交互频率仅为2mhz。在使用亚纳米高精度绝对式光栅尺时,在endat2.2格式中位置信息共有38位。依照以上解码方法,位置信息的计算占用了fpga大量运行时间,采样频率仅为5khz。在这种采样频率下无法实现复杂的控制算法,更达不到期望的控制效果。
技术实现要素:
[0005]
有鉴于此,有必要提供一种海德汉绝对式光栅尺解码方法及系统。
[0006]
本发明提供一种海德汉绝对式光栅尺解码方法,该方法包括如下步骤:a.将位置问询命令发送到光栅尺,光栅尺收到位置问询命令后向fpga发送自身位置数据;b.读取光栅尺发送的位置数据,根据读取的光栅尺位置数据,统一fpga与光栅尺信息交互的频率及得到光栅尺反馈位置信息数字信号;c.将得到的光栅尺反馈位置信息数字信号以二进制格式储存为数组,并将其转换为32位十进制数值;d.将32位十进制数值与分辨率系数相乘得到光栅尺反馈的位置值。
[0007]
优选地,所述方法还包括:
[0008]
将得到的光栅尺反馈的位置值转化格式后从fpga输出。
[0009]
优选地,所述的步骤a具体包括:
[0010]
将光栅尺发送的位置数据通过后续电路后传输至fpga 10,所述后续电路对光栅尺所述位置数据进行放大降噪处理。
[0011]
优选地,所述的步骤b具体包括如下步骤:
[0012]
发送周期性的方波时钟信号,及统一fpga与光栅尺信息交互的频率;
[0013]
发送读取光栅尺位置值的指令和读取光栅尺反馈位置信息数字信号。
[0014]
优选地,所述的步骤c具体包括:
[0015]
首先将所述光栅尺反馈位置信息数字信号生成布尔值,然后将其存储为布尔数组,最后将所述布尔数组转换为十进制数值。
[0016]
优选地,所述的步骤d具体包括:
[0017]
按照不同光栅尺的分辨率设定,将所述32位十进制数值x与分辨率k相乘得到光栅尺反馈位置值:
[0018]
pos=k
×
x。
[0019]
本发明提供一种海德汉绝对式光栅尺解码系统,该系统包括fpga及海德汉绝对式光栅尺,其特征在于,所述fpga包括问询模块、数字量i/o模块、位置信息采集模块、解码模块以及计算模块,其中:所述问询模块用于将位置问询命令发送到光栅尺;所述数字量i/o模块用于转换为读取模式读取光栅尺发送的位置数据;所述位置信息采集模块用于根据读取的光栅尺位置数据,统一fpga与光栅尺信息交互的频率及得到光栅尺反馈位置信息数字信号;所述解码模块用于将得到的光栅尺反馈位置信息数字信号以二进制格式储存为数组,并将其转换为32位十进制数值;所述计算模块用于将32位十进制数值与分辨率系数相乘得到光栅尺反馈的位置值。
[0020]
其中,所述系统还包括转化模块,所述转化模块用于将得到的光栅尺反馈的位置值转化格式后从fpga输出。
[0021]
本发明有益效果如下:首先,本发明采用labview软件及其配套fpga,能够在利用fpga进行控制算法实现的同时进行光栅尺反馈信号的采集,不再需要额外的采集硬件;其次,本发明采用的快速解码方法,采样频率提升至18.5khz,相较之前的解码方法提升了3倍多,能够实现多种控制算法;最后,使用本发明可以代替原厂的采集板卡,不再受信号输出格式限制。
附图说明
[0022]
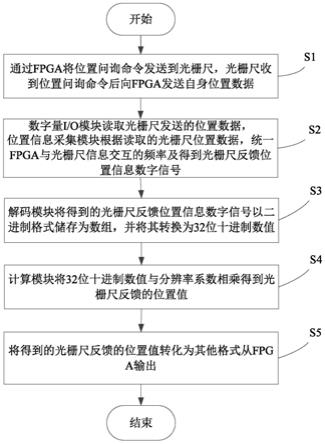
图1为本发明海德汉绝对式光栅尺解码方法的流程图;
[0023]
图2为本发明实施例提供的海德汉绝对式光栅尺位置信息解码方式对照表;
[0024]
图3为本发明实施例提供的海德汉绝对式光栅尺信号传输示意图;
[0025]
图4为本发明海德汉绝对式光栅尺解码系统的硬件架构图。
具体实施方式
[0026]
下面结合附图及具体实施例对本发明作进一步详细的说明。
[0027]
参阅图1所示,是本发明海德汉绝对式光栅尺解码方法较佳实施例的作业流程图(请一并参阅图2)。
[0028]
步骤s1,使用labview编写位置问询命令,通过fpga 10将所述位置问询命令发送到海德汉绝对式光栅尺20(以下简称“光栅尺”),光栅尺20收到位置问询命令后,向fpga 10发送自身位置数据。具体而言:
[0029]
在本实施例中,使用220v转5v的线性电源作为光栅尺20运行所需的+5v电压。将光栅尺20返回的位置数据通过图3所示的后续电路后传输至fpga 10,通过所述后续电路对光栅尺20反馈的位置数据进行放大降噪处理。
[0030]
步骤s2,数字量i/o模块102转换为读取模式读取光栅尺20发送的位置数据,位置
信息采集模块根据103读取的光栅尺20位置数据,统一fpga与光栅尺信息交互的频率及得到光栅尺20反馈位置信息数字信号。具体而言:
[0031]
位置信息采集模块103根据endat2.2协议分为两部分:一部分用来发送周期性的方波时钟信号,用来统一fpga 10与光栅尺20信息交互的频率;另一部分用来发送读取光栅尺20位置值的指令和读取光栅尺20反馈位置信息数字信号。
[0032]
步骤s3,解码模块104将得到的光栅尺20反馈位置信息数字信号以二进制格式储存为数组,并将其转换为32位十进制数值。具体而言:
[0033]
所述解码模块104首先将所述光栅尺20反馈位置信息数字信号生成布尔值,然后将其存储为布尔数组,最后将所述布尔数组转换为十进制数值。
[0034]
在本实施例中,所述解码模块104通过移位寄存器将得到的位置信息数字信号按照高低电平记为1、0数据,依次替换上一组相应位数的数据,待38位信号全部储存到fpga 10内,表示位置信息读取完成。然后将读取到的二进制38位数组转换为32位十进制数值x。
[0035]
步骤s4,计算模块105将32位十进制数值与分辨率系数相乘得到光栅尺20反馈的位置值。具体而言:
[0036]
按照不同光栅尺20的分辨率设定,将所述32位十进制数值x与分辨率k相乘得到光栅尺20反馈位置值。计算公式如下:
[0037]
pos=k
×
x。
[0038]
步骤s5:将得到的光栅尺20反馈的位置值转化为其他格式从fpga10输出。具体而言:
[0039]
由于在fpga 10中解码得出光栅尺20的位置值,针对fpga 10能够并行运行程序的特点,利用fpga 10对所述光栅尺20的位置值数据再次编码转为其他格式从fpga 10输出。所述其他格式包括:usb格式、串口格式。
[0040]
参阅图4所示,是本发明海德汉绝对式光栅尺解码系统1的硬件架构图。该系统包括fpga 10及海德汉绝对式光栅尺20;所述fpga 10包括:问询模块101、数字量i/o模块102、位置信息采集模块103、解码模块104、计算模块105以及转化模块106。
[0041]
所述问询模块101用于使用labview编写位置问询命令,将所述位置问询命令发送到海德汉绝对式光栅尺20。具体而言:
[0042]
光栅尺20收到位置问询命令后,向fpga 10发送自身位置数据。
[0043]
在本实施例中,使用220v转5v的线性电源作为光栅尺20运行所需的+5v电压。将光栅尺20返回的位置数据通过图3所示的后续电路后传输至fpga 10,通过所述后续电路对光栅尺20反馈的位置数据进行放大降噪处理。
[0044]
所述数字量i/o模块102用于转换为读取模式读取光栅尺20发送的位置数据。
[0045]
所述位置信息采集模块103用于根据103读取的光栅尺20位置数据,统一fpga与光栅尺信息交互的频率及得到光栅尺20反馈位置信息数字信号。具体而言:
[0046]
位置信息采集模块103根据endat2.2协议分为两部分:一部分用来发送周期性的方波时钟信号,用来统一fpga 10与光栅尺20信息交互的频率;另一部分用来发送读取光栅尺20位置值的指令和读取光栅尺20反馈位置信息数字信号。
[0047]
所述解码模块104用于将得到的光栅尺20反馈位置信息数字信号以二进制格式储存为数组,并将其转换为32位十进制数值。具体而言:
[0048]
所述解码模块104首先将所述光栅尺20反馈位置信息数字信号生成布尔值,然后将其存储为布尔数组,最后将所述布尔数组转换为十进制数值。
[0049]
在本实施例中,所述解码模块104通过移位寄存器将得到的位置信息数字信号按照高低电平记为1、0数据,依次替换上一组相应位数的数据,待38位信号全部储存到fpga 10内,表示位置信息读取完成。然后将读取到的二进制38位数组转换为32位十进制数值x。
[0050]
所述计算模块105用于将32位十进制数值与分辨率系数相乘得到光栅尺20反馈的位置值。具体而言:
[0051]
按照不同光栅尺20的分辨率设定,将所述32位十进制数值x与分辨率k相乘得到光栅尺20反馈位置值。计算公式如下:
[0052]
pos=k
×
x。
[0053]
所述转化模块106用于将得到的光栅尺20反馈的位置值转化为其他格式从fpga10输出。具体而言:
[0054]
由于在fpga 10中解码得出光栅尺20的位置值,针对fpga 10能够并行运行程序的特点,利用fpga 10对所述光栅尺20的位置值数据再次编码转为其他格式从fpga 10输出。所述其他格式包括:usb格式、串口格式。
[0055]
本发明主要基于labview及其配套硬件进行海德汉绝对式光栅尺的位置信息解码。使用labview进行采集程序的编辑,利用fpga实现指令信号的发送及位置信号的采集。采集到单一位置信息数字信号后不再进行解码计算,减少fpga计算功能节约运行时间。将采集到的位置信号进行储存,在第n位置信号采集完成后利用labview自带的布尔数组转数字模块,将位置信息转换为32位十进制数据格式数值。得到32位十进制数值x后与分辨率系数k相乘得到光栅尺反馈位置值。本发明能够提高位置信息采样频率,实现精密的控制算法,提高控制精度。
[0056]
虽然本发明参照当前的较佳实施方式进行了描述,但本领域的技术人员应能理解,上述较佳实施方式仅用来说明本发明,并非用来限定本发明的保护范围,任何在本发明的精神和原则范围之内,所做的任何修饰、等效替换、改进等,均应包含在本发明的权利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1