对IQ不平衡稳定的雷达检测方法和数字调制雷达与流程
对iq不平衡稳定的雷达检测方法和数字调制雷达
技术领域
1.本发明涉及尤其在数字调制雷达中的雷达信号生成和接收,以促成对与雷达收发机相关联的非理想性稳定的雷达操作。
背景技术:
2.由于数字调制雷达具有针对不同应用进行编程的固有能力以及通过数字信号处理技术执行后续处理的能力,因此现在变得越来越突出。在这方面,数据通常是指复数数据值,具有通常分别被称为同相(i)和正交(q)分量的实部和虚部。诸如i和q信号分量变成数字数据的点的增益和相位等信号路径特性需要非常高程度的平衡性,以保持信号完整性。
3.另一方面,i和q信号分量之间的任何不匹配都将允许产生伪影,例如雷达距离分布和/或雷达-距离多普勒图中的时间或距离旁瓣、或雷达距离多普勒图中的重影,并因此使雷达性能降级。此外,附加的前端非线性,尤其是来自发射机功率放大器的功率幅度非线性,可沿信号路径引入,这也可产生这样的非期望伪影并使总体性能进一步降级。
4.例如,文献ep 3 627 787 a1提出了一种对iq不平衡稳定的雷达检测技术。具体而言,ep 3 627 787 a1公开了基于对iq不平衡稳定的阿达玛变换来生成ofdm雷达信号。尽管ep 3 627 787 a1的ofdm雷达信号在发射机功率放大器非线性稳定性方面胜过任何ofdm雷达,但所提出的技术仅仅限于ofdm雷达并且被实现用于例如相位调制连续波(pmcw)雷达。
技术实现要素:
5.因此,本发明的目标是提供一种用于促成对常规前端非理想性稳定的雷达检测的方法和数字调制雷达,这通常可被实现用于所有数字调制雷达。
6.该目标通过针对该方法的第一独立权利要求的特征以及针对该数字调制雷达的第二独立权利要求的特征来达成。从属权利要求包含进一步的发展。
7.根据本发明的第一方面,提供了一种用于促成对iq不平衡稳定的雷达检测的方法。该方法包括在数字域中生成雷达信号的步骤,该雷达信号包括与渐进相位旋转相乘的具有长度lc的码序列的m次周期性重复,其中lc和m是整数,k是整数或非整数,且n是离散整数变量,即对应于码率的离散时间指标。该方法进一步包括以下步骤:在数字域中通过将对应于该雷达信号的反射信号与渐进相位旋转相乘来从该反射信号中生成处理输入信号。在该上下文中,k被定义成使得比率是非整数,且m被定义成使得比率是整数。
8.因此,本发明提出了一种生成对前端非理想性稳定的雷达信号的简化技术。本发明进一步提出了对来自所述雷达信号的雷达检测的简化处理,其中所述信号生成和所述信号处理不限于码序列的类型,即不限于数字调制雷达中所使用的调制方案的类型。必须维持的约束仅仅被限于诸如码序列长度lc等因子并且限于诸如k和m等变量,这些因子和变量被定义或选择,而不管码序列和/或调制方案的类型。
9.优选地,该方法进一步包括以下步骤:将处理输入信号与码序列相关以生成一连串距离分布。另外,该方法进一步包括累积m个连续距离分布的步骤。
10.雷达信号优选地包括码序列的周期性重复,并且反射信号一般包括码序列的延迟版本的线性组合。该延迟与目标距离位置成比例。为了估计所述延迟,将反射信号与所传送的码序列(或者所传送的码序列的复共轭)相关,这产生距离分布。所述距离分布包含每一个目标的位置处的峰值,该峰值与从所述目标反射回来的功率成比例。另外,累积多个连续距离分布(例如,m个距离分布)有利地改善例如信噪比。
11.优选地,该方法进一步包括对于给定雷达带宽相对于雷达的最大明确距离来定义lc的步骤,其中雷达的最大明确距离由该雷达的完全在下一发射脉冲或码片之前接收所反射的脉冲或码片的能力来给出。另外,雷达带宽优选地基于优选距离分辨率(即,其目标的最小间隔距离的度量)来定义。
12.优选地,该方法进一步包括生成雷达信号的步骤,该雷达信号包括码序列的m次周期性重复的n次周期性重复,其中n是整数。另外,该方法进一步包括处理n个距离分布以产生距离-多普勒图的步骤。换言之,重复数n定义用于进行多普勒处理以估计目标速度的样本的数目。
13.优选地,码序列对应于二进制码序列或实码序列或复码序列。为此,如果码序列对应于二进制码序列,例如调制对应于二进制相移键控(bpsk),则该方法进一步包括将k定义为由下式给出的整数或非整数的步骤:
[0014][0015]
其中d是整数。
[0016]
因此,本发明进一步提出本发明方法的因调制而异的(bpsk)实现以解决除了iq不平衡性以外的前端的附加非理想性。具体而言,本发明另外解决了功率幅度非线性并且进一步提出了对所述非线性稳定的雷达信号生成和处理方案。所述功率幅度非线性尤其是由于发射机功率放大器中所引入的非线性失真而导致的,并且进一步引入不想要的伪影,例如距离分布和/或距离-多普勒图中的距离旁瓣或者距离-多普勒图中的重影。
[0017]
根据本发明的第二方面,提供了一种用于促成对iq不平衡稳定的雷达检测的数字调制雷达。该数字调制雷达包括码生成单元,其被配置成在数字域中生成雷达信号,该雷达信号包括与渐进相位旋转相乘的具有长度lc的码序列的m次周期性重复,其中lc和m是整数,k是整数或非整数,且n是离散整数变量,即对应于码率的离散时间指标。
[0018]
该数字调制雷达进一步包括处理单元,其被配置成在数字域中通过将对应于该雷达信号的反射信号与渐进相位旋转相乘来从该反射信号中生成处理输入信号。在该上下文中,码生成单元被进一步配置成定义k以使得比率是非整数。此外,码生成单元被进一步配置成定义m以使得比率是整数。
[0019]
因此,本发明提出了一种生成雷达信号以及处理雷达检测的简化技术,该生成和处理对于前端非理想性是稳定的并且不限于数字调制雷达中所使用的码序列和/或调制方案的类型。
[0020]
优选地,数字调制雷达进一步包括被配置成传送雷达信号的发射路径,该发射路径包括至少一个数模转换器、至少一个低通滤波器、至少一个混频器、以及至少一个功率放大器。优选地,数字调制雷达进一步包括被配置成接收反射信号的接收路径,该接收路径包括至少一个低噪放大器、至少一个混频器、至少一个低通滤波器、以及至少一个模数转换器。进一步优选地,该发射路径被配置成通过其各自的域转换和连续滤波来传送i和q信号分量。类似地,接收路径被配置成通过其各自的滤波和连续域转换来传送i和q信号分量。
[0021]
优选地,处理单元被进一步配置成将处理输入信号与码序列相关以生成一连串距离分布。为此,该处理单元被进一步配置成累积m个连续距离分布。有利地,多个连续距离分布(例如,m个距离分布)的累积改善例如信噪比。
[0022]
优选地,码序列对应于二进制码序列或实码序列或复码序列。为此,在码序列对应于二进制码序列的情形中,码生成单元被进一步配置成将k定义为由下式给出的整数或非整数:
[0023][0024]
其中d是整数。有利地,本发明进一步提出因调制而异的(bpsk)实现以解决除了iq不平衡性以外的前端的附加非理想性。
附图说明
[0025]
本发明的示例性实施例现在参照仅仅作为示例而非限制的附图来进一步解释。在附图中:
[0026]
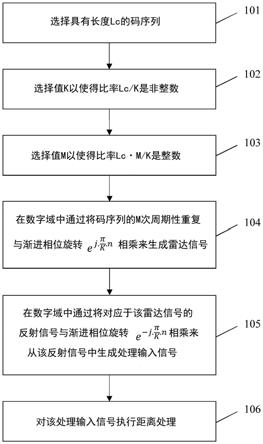
图1示出了根据本发明的第一方面的方法的示例性实施例;
[0027]
图2示出了用于获取一个雷达数据立方体的示例性传输帧。
[0028]
图3a示出了具有两个目标的理想m序列距离分布;
[0029]
图3b示出了具有两个目标的理想aps距离分布;
[0030]
图4示出了根据本发明的第二方面的数字调制雷达的示例性实施例;
[0031]
图5a详细地示出了图4的码生成单元;
[0032]
图5b详细地示出了图4的处理单元;
[0033]
图6作为示例地示出了z因变于k的幅值;
[0034]
图7a示出了针对具有bpsk调制的序列长度544的累积后的aps距离分布;
[0035]
图7b示出了针对具有msk调制的序列长度544的累积后的aps距离分布;
[0036]
图7c示出了针对具有pi/2-bpsk调制的序列长度544的累积后的aps距离分布;
[0037]
图7d示出了根据所提出的解决方案的针对具有pi/3-bpsk调制的序列长度544的累积后的aps距离分布;
[0038]
图8a示出了针对具有bpsk调制的序列长度511的累积后的m序列距离分布;
[0039]
图8b示出了针对具有msk调制的序列长度511的累积后的m序列距离分布;
[0040]
图8c示出了针对具有pi/2-bpsk调制的序列长度511的累积后的m序列距离分布;以及
[0041]
图8d示出了根据所提出的解决方案的针对具有pi/3-bpsk调制的序列长度511的累积后的m序列距离分布;
具体实施方式
[0042]
现在将详细参考本发明的各实施例,其示例在各附图中示出。然而,本发明的以下实施例可被各种修改并且本发明的范围不受以下实施例的限制。
[0043]
在图1中,示出了根据本发明的第一方面的方法的示例性实施例。在第一步骤101中,选择具有码序列长度lc的码序列。在第二步骤102中,选择参数k的值以使得比率lc/k是非整数。在第三步骤103中,选择参数m的值以使得比率lc
·
m/k是非整数。在第四步骤104中,在数字域中通过将码序列的m次周期性重复与渐进相位旋转相乘来生成雷达信号。在第五步骤105中,在数字域中通过将对应于该雷达信号的反射信号与渐进相位旋转相乘来从该反射信号中生成处理输入信号。最后,在第六步骤106中,对该处理输入信号执行距离处理。
[0044]
该距离处理包括距离分布、多普勒分布的生成,并且进一步包括被称为距离-多普勒图的所述距离和多普勒分布的组合。为此,该方法包括以下连续步骤:将处理输入信号与码序列相关以生成一连串距离分布并且进一步累积m个连续距离分布以改善snr。
[0045]
在图2中,示出了用于获取一个雷达数据立方体的示例性传输帧200。传输帧200被示为用于单输入单输出相位调制连续波(siso-pmcw)雷达的常规传输帧。码序列长度lc定义码序列202(如在此表示为“s”)中的样本或码片201的数目。换言之,码序列长度lc定义用于距离处理运算的距离区间的数目。由此,数字调制雷达的所谓的脉冲重复频率可被定义为例如以码片率fc自我重复的长度lc的序列。
[0046]
参数m定义所累积的相同码序列“s”的重复203的次数,这类似于常规伪随机码序列,诸如最大长度序列(mls)。换言之,重复数m定义要相干累积的距离分布的数目。参数n定义m个序列203的重复204的次数,即供进行多普勒处理以估计目标速度的样本数。因此,码序列“s”在传输帧200中被重复m
·
n次用于一个雷达数据立方体的获取。
[0047]
在检测相位期间,发射信号从雷达前方的所有目标或障碍物反射。这产生码序列“s”的延迟版本的线性组合。该延迟与目标距离位置成比例。为了估计该延迟,将接收到的信号与所传送的码序列“s”相关(例如用于二进制码序列)或者与所传送的码序列“s”的复共轭相关(例如用于复码序列)。这产生包含每一个目标的位置处的峰值的距离分布,该峰值与从所述目标反射回来的功率成比例。
[0048]
在图3a和3b中,示出了用于理想雷达收发机的示例性距离分布。具体而言,图3a示出了对于m序列(mls)的具有两个目标的理想距离分布。水平轴表示所述目标的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈301和302指示两个目标。而图3b示出了对于近乎完美序列(aps)的具有两个目标的理想距离分布。水平轴表示所述目标的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈303和304指示两个目标。
[0049]
理想地,相关器的输出在距离区间中包含零,这些零不对应于任何目标。实际上,一些非空值可显得来自码序列特性。这些值被称为距离旁瓣。例如,m序列始终产生比相关峰值低-20log10(lc)db的距离旁瓣,其中lc是码序列长度,如图3a所示。另一方面,aps不产生任何旁瓣,如图3b所示。理想码序列应具有以下特性:
[0050][0051]
这针对bpsk码序列,或者
[0052][0053]
这针对复码序列,其中bc(n)是数字域中的码序列,δ是码序列中的对应于目标距离的循环移位,且()
*
是复共轭运算。
[0054]
如已在上文中提及的,m个连续距离分布被累积以改善snr,而多普勒处理是通过离散傅立叶变换(dft)沿着慢速实现的,即m个码序列的n次重复。如果使用多个天线,则还可应用具有常规波束成形或多输入多输出(mimo)的角处理。在具有理想收发机的情况下,对点目标的响应创造距离、距离-多普勒或距离-多普勒-角度域中的尖峰值,这可能受到波形序列的理论旁瓣的限制。然而,在具有非理想收发机的情况下,理想响应被降级,这通常表现为重影目标的出现或旁瓣增大。非理想性的典型源是功率放大器非线性或iq不匹配性。
[0055]
对序列“s”的选择取决于数字调制雷达的类型,诸如基于相位调制连续波(pmcw)的雷达或者基于正交频分调制(ofdm)的雷达。
[0056]
在pmcw雷达的情况下,距离处理是借助于相关来执行的。因此,码序列选择取决于码序列的周期性自动相关特性,如在式(1)和(2)中定义的。在此,满足上述自动相关特性的码序列被选择。为此,aps和m序列在本说明书中例示,这完美满足上述自动相关特性。特别地,aps在距离分布中产生两个非零值,而不是仅仅一个非零值,并且当δ≠0时,m序列给出值1,而不是0,
[0057]
在ofdm雷达的情况下,距离处理是通过与无线通信中的信道均衡相类似的处理来执行的。该操作提取距离分布并自我移除码序列。因此,可使用lc复样本的每一序列并因此不存在对所述复样本的值的约束。所提出的解决方案有效地解决上述非理想性并促成对所述非理想性稳定的雷达检测,其中可实现所提出的解决方案,而不管码序列选择以及数字调制雷达的类型。
[0058]
在图4中,示出了根据本发明的第二方面的数字调制雷达400的示例性实施例。数字调制雷达400包括在数字域中生成雷达信号402的码生成单元401。在码生成单元401下游的数模转换器(dac)403在模拟域中转换数字雷达信号402,由此生成模拟雷达信号404。在dac 403下游的低通滤波器(lpf)405执行对模拟雷达信号404的基带滤波,即滤除较高频率分量,由此生成经滤波的雷达信号406。
[0059]
在lpf 405下游的混频器407用优选地由本地振荡器(未示出)生成的载波正弦波来调制经滤波的雷达信号406,由此生成rf雷达信号408。放大器,尤其是功率放大器(pa)409放大rf雷达信号408,由此生成经由发射机天线411传送的雷达发射信号410。因此,用于传送雷达信号402的发射路径由dac 403、lpf 405、混频器407、pa 409以及可选的发射机天线411组成。
[0060]
雷达发射信号410通常从所有目标反射并且所得回波或反射信号或雷达接收信号
430由接收机天线接收。一般而言,发射信号410的仅仅一部分被反射回到接收机天线431。放大器,尤其是低噪放大器(lna)429放大雷达信号430,由此生成放大的雷达接收信号428。在lna 429下游的混频器427用由本地振荡器生成的载波信号来解调放大的雷达接收信号428,即放大的雷达接收信号428的直接转换,由此生成基带信号426。
[0061]
在混频器427下游的低通滤波器(lpf)425对基带信号426进行滤波,由此生成经滤波的基带信号424。在lpf 425下游的模数转换器(adc)423将经滤波的基带信号424转换到数字域中,由此在数字域中生成与由码生成单元401在数字域中生成的雷达信号402相对应的反射信号422。数字调制雷达400进一步包括处理单元421,该处理单元在数字域中从反射信号422中生成处理输入信号以执行距离和多普勒处理。因此,用于接收反射信号422的接收路径由lna 429、混频器427、lpf 425、adc 423以及可选的接收机天线431组成。
[0062]
可以理解,发射机天线411和接收机天线431可被实现为天线阵列中的专用天线,以用于数字调制雷达400的相应发射路径和接收路径。还可想到发射机天线411和接收机天线431可以在单个天线阵列中实现并且该天线阵列可以按切换方式操作,例如天线切换或循环器,以用于数字调制雷达400的发射路径和接收路径。
[0063]
码生成单元401被进一步配置成与处理单元421通信以提供关于用于相关的所选码序列的信息。通信信号被示为虚线412。可以想到码生成单元401和处理单元421可被实现为单个实体,例如作为基带处理单元。此外,用于生成和/或处理雷达信号的附加装置,例如用于存储码序列、控制命令等的存储器,或存储以及诸如用户接口等接口,未被显式地示出,但在上述实现中是显而易见的。
[0064]
由于混频器407和427的非理想性,i和q分量不是等同的并因此引发所述i和q分量之间的不匹配,这被称为iq不平衡。一般而言,混频器407的非理想性引入iq不平衡,iq不平衡导致例如雷达距离-多普勒图中的距离旁瓣或重影。此外,混频器427的非理想性还在基带信号中引入iq不平衡。由于上述效应,所得雷达距离分布可包含显著的距离旁瓣。另外,pa 409的非线性通过例如在雷达距离-多普勒图中产生距离旁瓣或重影来使得雷达性能进一步降级。
[0065]
在图5a和图5b中,在码生成单元401中雷达信号402的生成以及在处理器421中处理输入信号524的生成被详细地示出。图5a的码生成单元401包括根据预定义码序列来生成码片信号或码片的信号发生器501。这一码序列可对应于如图2所示的包括lc码片的序列“s”的传输帧,该序列“s”被重复m次并最终“s”的m次重复被进一步重复n次。换言之,序列“s”在单个传输帧中被重复m
·
n次。
[0066]
在此,码序列被示为bc(n),其中n定义对应于码率的离散时间指数。在常规数字调制雷达中,码序列bc(n)作为雷达信号被重复传送,即重复码序列bc(n)被直接使用以用于连续转换、滤波和放大阶段。然而,为了根据本文提出的创造性解决方案来生成对非理想性稳定的雷达信号,码生成单元401进一步包括将bc(n)的周期性重复(在此示为b(n))与渐进相位旋转相乘的乘法器503。因此,雷达信号402按数字码序列可被表达为:
[0067][0068]
其中b(n)是bc(n)的周期性重复。
[0069]
另一方面,处理单元421在如图4描述的基带转换后接收反射信号422(在此示为u
(n))。处理单元421包括将反射信号u(n)与渐进相位旋转相乘的乘法器523。这产生处理输入信号524(在此示为v(n)),该信号用于后续处理。因此,该处理输入信号v(n)可被表达为:
[0070][0071]
可以看到对接收信号的渐进相位旋转具有与对发射信号的渐进相位旋转相对的旋转角。因此,乘法器523有效地移除复指数。
[0072]
处理单元421进一步包括处理块525,该处理块例如在从码生成单元401,尤其是信号发生器501馈送的码序列信息412的帮助下将处理输入信号524与码序列bc(n)相关,由此执行距离处理以生成雷达距离分布。处理块525进一步累积m个连续距离分布以移除来自iq不平衡的距离旁瓣,这将在后续各节中详细地描述。m个连续分布的累积进一步改善例如snr。处理单元421进一步包括离散傅里叶变换(dft)块527,该dft块527对n个样本执行dft以产生多普勒分布。
[0073]
在下文中,关于参数lc、k和m及其对距离旁瓣减小的影响(尤其是因为iq不平衡)的准则被详细地描述。
[0074]
反射信号422在时域中可被描述为:
[0075]
u(t)=αy(t)+βy
*
(t)
ꢀꢀꢀ
(5)
[0076]
因此,对于理想情形,即当不存在i和q分支之间的不匹配或不平衡时,α=1且β=0。
[0077]
因此,发射路径和/或接收路径上的iq不匹配将产生距离旁瓣,诸如:
[0078][0079]
其中δ是传播延迟。
[0080]
在式(6)中,第一项是与取决于传播延迟δ的相位旋转相乘的码序列的延迟版本。因此,码序列的自动相关特性不受影响。
[0081]
然而,第二项也是与相位旋转相乘的码序列的延迟版本。另外,该项还包含渐进相位旋转该渐进相位旋转破坏了码序列的相关特性。这将导致距离旁瓣。然而,在k的选择准则下,所述渐进相位旋转将在雷达数字处理链期间被缓解。
[0082]
例如,前三个距离分布可被表达为:
[0083][0084][0085][0086]
其中d是码序列bc(n)中的循环移位。
[0087]
每一距离分布rk(d)受距离旁瓣影响。这可被描述为:
[0088][0089]
其中r
sl,k
(d)包含来自rk(d)的距离旁瓣。
[0090]
式(8)可被重写为:
[0091][0092]
因为b(n)是包含lc个样本的bc(n)的周期性重复。
[0093]
可以看到,所有距离分布将具有如下相同的距离旁瓣:
[0094][0095]
该距离旁瓣与取决于距离分布指数的相位旋转相乘。因此,式(9)能够以简化形式被重写为:
[0096][0097]
从式(11)中,可以归纳出如果lc不是k的倍数,则连续距离分布中的距离旁瓣不同相并因此将在累积期间衰减。
[0098]
此外,可以从式(11)中归纳出,如果lc
·
m/k是整数,则全部m个距离分布中的指数d处的距离旁瓣的相位被均等地分布在复圆上。因此,m个连续距离分布的累积消除了距离旁瓣,如在下式中示出的:
[0099][0100]
这也可被扩展到复码序列以及ofdm雷达,因为它们传送复数字调制信号。尤其是对于复码序列,可以看到,重影由表示,这类似于式(6),但具有复算符()*,即码序列的复共轭。然而,它们在k的函数中受到相同的相位旋转的影响。因此,本文提出的解决方案还可用于用复码序列来有效地补偿由(发射机和接收机侧的)iq不平衡产生的距离旁瓣。
[0101]
在下文中,关于参数k及其对距离旁瓣减小的影响(尤其是因为功率放大器非线性)的准则被详细地描述。以下技术是对二进制码序列执行的,例如在诸如pmcw雷达等二进制相位调制雷达中实现。
[0102]
实现低复杂性pmcw雷达的高效方式是使用bpsk调制。以此方式,调制信号仅仅是{-1;+1}码序列。这产生二进制相位调制雷达。除了该低复杂性之外,bpsk调制还显示出低峰均功率比(papr)。理想地,papr应当是0 db(不变量)。然而,因为发射机带宽受限,所以从a+1到a-1的转变不是即时的,并且波形展示出非恒定幅值,这使该波形对于功率放大器中所引入的非线性失真是灵敏的。该papr降级还可来自与特定频谱掩码相适配所需的脉冲整
形操作。该现象在距离分布中产生被称为距离旁瓣或重影的非期望伪影。
[0103]
将码序列b(n)认为是二进制码序列,该二进制码序列在数字域中按复指数与渐进相位旋转相乘,如上所述。这产生雷达信号s(n),如式(3)所示。该雷达信号然后在模拟域中被转换并调制载波正弦波。
[0104]
一般而言,传输是带宽受限的,这可以通过lpf 405用脉冲响应h(n)来建模。该信号然后通过pa 409来放大。为了降低雷达信号传输的功耗,pa 409被优选地靠近其饱和点操作。然而,这在发射信号中产生非线性失真,这使雷达性能降级。
[0105]
所提出的解决方案实现了不同的技术,即不是创造具有低papr的波形。所提出的技术创造能够消除距离旁瓣的最重要源的波形。出于该原因,提出以下两个假设:
[0106]
1)功率放大器非线性模型可以用立方模型来近似:
[0107]
y(n)=a0x(n)+a3x(n)|x(n)|2ꢀꢀꢀ
(13)
[0108]
其中a0是功率放大器线性增益(正实值)且a3是三阶非线性(负实值)。
[0109]
该假设实际上在以下情况下被满足:基带功率放大器模型中不存在偶数非理想性并且实际上三阶非线性占主导。
[0110]
2)lpf离散脉冲响应中的只有三个抽头是显著的:
[0111][0112]
由于h(n)是低通滤波器,因此该假设是现实的。然而,如果在滤波器离散脉冲响应中存在不止三个抽头,则源自所述附加抽头的非线性失真(与功率放大器非线性相组合)将被部分地补偿。换言之,所述假设被提出以移除源自三个最显著抽头的旁瓣和重影并因此移除距离旁瓣和重影的最显著部分。
[0113]
处理输入信号v(n)包含作为二进制码序列b(n)的线性组合的若干项,这些线性组合取决于目标位置并包含有用信息。其他项取决于b(n)的非线性组合。所述非线性组合将在距离分布中产生距离旁瓣或重影。然而,对于每一情形,非线性组合全都乘以:
[0114][0115]
对于其z(k)=0的k的值将不会产生任何距离旁瓣和重影。至少,脉冲响应h(n)的三个最显著抽头以及三阶非线性所产生的旁瓣和重影由于波形特性而被消除。
[0116]
在图6中,示出了z因变于k的幅值600。水平轴定义k的值,且垂直轴定义|z|的幅值。可以看到,例如,在点601和602,z因变于k的幅值600达到零。对于该示例,使|z|为零的k值分别是点601和602处的1.5和3。因此,诸如3或1.5等k值不给出距离旁瓣或重影,而k值2给出更大的距离旁瓣和重影。从该图示中,参数k能够以简化形式表达,诸如:
[0117][0118]
其中d是整数。因此,可能的k值可被近似为
±
3,
±
1.5,等等。
[0119]
参数lc、k和m的一些示例性组合在下表中示出:
[0120]
lcmk8443351122
84433102322102433
[0121]
例如,对于844的码序列长度lc,三个连续距离分布(即m)需要被累积并且k的值需要被定义为3。该特定组合允许对iq不平衡稳定的雷达信号的生成,而不管数字调制雷达的调制技术。此外,由于k的值是3,这满足如式(16)所示的二进制码序列的准则,因此该组合进一步允许对功率放大器非线性稳定的雷达信号的生成,尤其对于二进制相位调制雷达。
[0122]
在图7a、图7b、图7c和图7d中,示出了针对用于不同调制技术的具有码序列长度544的aps码序列的距离分布。
[0123]
图7a示出累积后的具有两个目标701、702的距离分布,尤其是针对用于二进制相移键控(bpsk)调制的具有码序列长度544的aps码序列。水平轴表示所述目标701、702的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈701和702指示两个目标。距离旁瓣的幅值可被近似为大约-60db。
[0124]
图7b示出累积后的具有两个目标701、702的距离分布,尤其是针对用于最小移位监控(msk)调制的具有码序列长度544的aps码序列。水平轴表示所述目标701、702的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈701和702指示两个目标。距离旁瓣的幅值可被近似为大约-40db,即旁瓣幅值相对于图7a的技术递增大约20db。
[0125]
图7c示出累积后的具有两个目标701、702的距离分布,尤其是针对用于pi/2二进制相移键控(π/2-bpsk)调制的具有码序列长度544的aps码序列。水平轴表示所述目标701、702的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈701和702指示两个目标。距离旁瓣的幅值可被近似为大约-50db,即该旁瓣幅值相对于图7a的技术递增大约10db,并且该旁瓣幅值相对于图7b的技术递减大约20db。
[0126]
图7d示出根据所提出的解决方案的累积后的具有两个目标701、702的距离分布,尤其是针对具有码序列长度544的aps码序列。在此,k的值被选为3,m的值被选为3,并且用二进制相移键控(π/3-bpsk)调制来实现。水平轴表示所述目标701、702的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈701和702指示两个目标。距离旁瓣的幅值可被近似为大约-100db,这显示出与图7a、图7b和图7c所示的技术相比更好的旁瓣抑制,即旁瓣抑制被分别改进大约40db、60db和50db。
[0127]
注意,-100db的距离旁瓣源自低通滤波器的不止三个抽头的附加抽头,如上所述。如果低通滤波器只有三个抽头,则将不会在图7d所示的距离分布中观察到距离旁瓣。然而,所提出的解决方案展示出胜过图7a、图7b和图7c所示的技术的性能,因为由滤波器的三个最显著抽头产生的旁瓣被抑制。
[0128]
在图8a、图8b、图8c和图8d中,示出了针对用于不同调制技术的具有码序列长度511的m序列码序列的距离分布。尤其对于m序列,距离旁瓣来自对码序列自身的限制,因为本领域内已知m序列在受到放大器非线性影响的情况下产生重影目标。
[0129]
图8a示出累积后的具有两个目标801、802的距离分布,尤其是针对用于二进制相移键控(bpsk)调制的具有码序列长度511的m序列码序列。水平轴表示所述目标801、802的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆
圈801和802指示两个目标。距离旁瓣的幅值可被近似为大约-50db。还可看到该技术产生重影目标,如在峰值803处指示的。
[0130]
图8b示出累积后的具有两个目标801、802的距离分布,尤其是针对用于最小移位键控(msk)调制的具有码序列长度511的m序列码序列。水平轴表示所述目标801、802的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈801和802指示两个目标。距离旁瓣的幅值可被近似为大约-55db。
[0131]
图8c示出累积后的具有两个目标801、802的距离分布,尤其是针对用于pi/2二进制相移键控(π/2-bpsk)调制的具有码序列长度511的m序列码序列。水平轴表示所述目标801、802的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈801和802指示两个目标。距离旁瓣的幅值可被近似为大约-55db,然而受放大器非线性影响并产生重影目标,如在峰值804处指示的。
[0132]
图8d示出根据所提出的解决方案的累积后的具有两个目标801、802的距离分布,尤其是针对具有码序列长度511的m序列码序列。在此,k的值被选为3,m的值被选为3,并且用二进制相移键控(π/3-bpsk)调制来实现。水平轴表示所述目标801、802的以米为单位的距离,且垂直轴表示以分贝为单位的反射功率幅值。在此,在相应峰值处用圆圈801和802指示两个目标。距离旁瓣的幅值可被近似为大约-50db,并且不存在重影目标,这指示对放大器非线性的稳定性。
[0133]
因此,可以看到例如对于奇数长度码序列(例如,511),π/2-bpsk对iq不匹配是稳定的,但受功率放大器非线性的影响。另一方面,msk脉冲整形可被视作具有不变量的特殊π/2-bpsk情形。因此,msk技术也是对奇数码序列的可行替代方案。然而,π/2-bpsk和msk脉冲整形技术只在m满足所提出的lc
·
m/k是整数的准则的情况下才对iq不平衡是稳定的。对于其他m值,对iq不平衡的稳定性无法通过所述技术来达成。然而,对于偶数长度码序列(例如,544),pi/2-bpsk和msk脉冲整形对于iq不匹配是非常灵敏的。所提出的解决方案(例如,如在此被例示为pi/3-bpsk调制技术)与用于偶数长度码序列的上述技术相比在旁瓣抑制方面是更好的。
[0134]
因此,所提出的解决方案解决了诸如pmcw和ofdm雷达等数字调制雷达中的旁瓣降级和重影问题。在这些雷达中,通过仔细地选择波形序列和用于构建雷达数据立方体的算法,可实现近乎理想的模糊函数。然而,收发机非理想性(非线性、饱和/削波、相位噪声、iq不平衡、adc抖动等)可造成模糊函数的降级,这表现为引发距离旁瓣和/或出现重影目标。距离旁瓣降级导致灵敏度降低,重影目标导致假警报;因此这两者都必须被尽可能多地避免。
[0135]
所提出的解决方案的目标是最小化功率放大器非线性和iq不平衡的影响。出于该目的,渐进相位旋转被添加到发射信号以便因距离分布而异地修改iq不匹配的影响。因此,在定义了虚了长度lc、累积数m和相位旋转pi/k的组合的情况下,因此可消除来自iq不匹配的距离旁瓣。另外,对于bpsk pmcw雷达,特定相位旋转pi/k极大地改进了对功率放大器非线性的稳定性。
[0136]
本发明的实施例可由硬件、软件或其组合来实现。本发明的各实施例可由一个或多个专用集成电路(asic)、数字信号处理器(dsp)、数字信号处理设备(dspd)、可编程逻辑设备(pld)、现场可编程门阵列(fpga)、处理器、控制器、微控制器、微处理器等来实现。
[0137]
尽管本发明已经针对一个或多个实施方式进行了说明和描述,但本领域的其他技术人员在阅读和理解本说明书和附图后将想到等效的改变和修改。另外,虽然本发明的特定特征可能仅相对于几种实现中的一种被公开,但是这种特征可以与其他实现的一个或多个其他特征组合,如对于任何给定或特定应用可能是需要的和有利的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1