一种面向行波故障定位的线长修正方法
1.本发明涉及输电线路故障测距技术领域,具体涉及一种面向行波故障定位的线长修正方法。
背景技术:
2.考虑到电缆线路的技术要求与成本费用较高,现代输电网络的组成部分主要是架空线路。随着架空线路负荷电流以及外界环境等因素的变化,架空线路弧垂参数随之发生改变,进而导致架空线路实际线长发生变化。现有行波测距公式均利用行波在导线中的传输时间与输电线路固定线长参数进行故障定位,考虑到线路弧垂的变化会导致实际线长与固定线长参数存在数值误差,使得故障位置发生改变,影响故障定位精度。当前行波测距是输电线路精确故障定位的主流,因此研究输电线路的线长修正对于故障测距具有重要意义,是提高电力系统运行维护的重要保证。
3.输电导线弧垂是导线安全运行的重要指标,弧垂应控制在一定的范围之内,针对架空线路弧垂的在线测量计算问题,一些学者对于弧垂的测量和实时监测提出了多种方法,传统的导线弧垂测量方法,如:王创权.高压送电线路弧垂测量的几种方法[j].企业技术开发,2010,29(11):26
‑
27+30)和从图像处理的角度对弧垂进行实时监测(黄新波,张晓霞,李立浧,罗兵.采用图像处理技术的输电线路导线弧垂测量[j].高电压技术,2011,37(08):1961
‑
1966)记载的方法,但这些方法测量的工作量大,不够简便,有时还与测量工作人员的生命财产安全息息相关。
技术实现要素:
[0004]
针对现有行波测距法在进行故障定位时,应用的长度参数均为输电线路固定线长而非实际线长,导致故障定位精度降低的问题。本发明提出一种面向行波故障定位的线长修正方法,旨在规避负荷电流及外界环境变化对实际线长的影响,提高输电线路行波故障定位的精度。
[0005]
本发明采取的技术方案为:
[0006]
一种面向行波故障定位的线长修正方法,建立输电线路高差绝对值参数矩阵及输电线路档距参数矩阵,通过图像识别法获取对应档距内线路最低点位置,构建应比系数k,根据应比系数k与水平距离l
oa
、l
ob
,利用斜抛物线水平距离方程,得到应比系数k的初始值,微调应比系数k的初始值,获得应比系数k的修正值;建立实际线长参数矩阵与档距误差参数矩阵,通过线长误差参数与高差绝对值的比值参数,得到完整档距误差参数矩阵,再根据误差参数矩阵与实际线长参数矩阵的关系,得到所属类别的实际线长,将各类组别修正后的线长叠加,得到输电线路实际总线长l
sum
;通过输电线路实际总线长l
sum
与水平档距l
sum
对应关系进行故障位置修正,得到距离输电线路测量端的实际故障位置l
x
。
[0007]
一种面向行波故障定位的线长修正方法包括以下步骤:
[0008]
步骤一:对电力公司提供的输电线路以高差绝对值进行分类,建立高差绝对值参
数矩阵及输电线路档距参数矩阵。
[0009]
步骤二:通过图像识别法,获取对应档距内线路最低点位置,根据悬链线线长公式,构建应比系数k,根据应比系数k与水平距离l
oa
、l
ob
,利用斜抛物线水平距离方程,得到应比系数k的初始值,根据悬链线水平距离公式,应用并微调应比系数k的初始值,获得应比系数k的修正值。
[0010]
步骤三:根据装设图像识别设备档距的实际线长,建立实际线长参数矩阵与档距误差参数矩阵,通过线长误差参数与高差绝对值的比值参数,推算出未装设图像识别设备的档距误差参数,得到完整档距误差参数矩阵,再根据误差参数矩阵与实际线长参数矩阵的关系,推算出未装设图像识别设备档距的实际线长,将全部档距进行实际线长累加,得到所属类别的实际线长,将各类组别修正后的线长叠加,得到输电线路实际总线长l
sum
。
[0011]
步骤四:通过输电线路实际总线长l
sum
与水平档距l
sum
对应关系进行故障位置修正,得到距离输电线路测量端的实际故障位置l
x
。
[0012]
所述步骤一中,将组成单条输电线路的全部档距,按照高差h的绝对值大小进行分类,高差绝对值以3m为间隔进行组别分类,将杆塔高差绝对值记为h
i
(i=1,2,
…
,n),建立该高差绝对值参数矩阵a=[h1,h2,
…
,h
n
],将每个高差对应的输电线路水平档距记为l
i
(i=1,2,
…
,n),建立输电线路档距参数矩阵b=[l1,l2,
…
,l
n
]。
[0013]
所述步骤二包括以下步骤:
[0014]
步骤2.1:对装设图像识别设备的线路进行拍照,对获取的输电线路图形进行滤波降噪处理,采取自适应滤波降噪,将经过滤波降噪后的图像进二值化及边缘检测处理,将其处理为数学示意图,根据弧垂公式,确定导线最低点到两杆塔悬挂点之间的水平距离l
oa
、l
ob
,得到完整输电线路示意图。
[0015]
步骤2.2:根据悬链线线长公式,得到架空线路的高差角β,设立应比系数σ0为水平应力,γ为输电线路比载,建立应比系数k与输电线路实际线长之间的联系。
[0016]
步骤2.3:根据所得的水平距离参数l
oa
、l
ob
,利用斜抛物线水平距离方程(5):
[0017][0018]
得到应比系数k的初始值。
[0019]
步骤2.4:根据悬链线的导线最低点到悬挂点水平距离公式(6),将所得的应比系数k的初始值代入公式,得到新的图像识别法确定的水平距离l
oa
、l
ob
,将其代入公式(5),获得应比系数k的修正值。
[0020]
[0021]
所述步骤三包括以下步骤:
[0022]
步骤3.1:将得到的应比系数k的修正值应用到悬链线线长公式,从而得到单个档距内的实际线长l
i
(i=1,2,
…
,n),建立实际线长参数矩阵l=[l1,l2,
…
,l
n
]。
[0023]
步骤3.2:由于架空线路全线装设图像识别设备成本过高,设在输电线路的第m、p、k三个档距装设图像识别设备,可得到这三个档距内的实际线长l
m
、l
p
、l
k
;
[0024]
步骤3.3:由第i个档距内的实际线长l
i
与固定线长l
i
,建立第i个档距的线长误差参数可得到第m、p、k三个档距的线长误差参数ω
m
、ω
p
、ω
k
,建立档距误差参数矩阵c=[ω1,ω2,
…
,ω
n
]。
[0025]
步骤3.4:建立线长误差参数ω
i
与高差绝对值h
i
比值参数可得第m、p、k三个档距的比值参数k
m
、k
p
、k
k
,根据k
m
、k
p
、k
k
三个比值参数得到一个平均比值参数通过矩阵方程c=k
av
a得到完整档距误差参数矩阵c=[ω1,ω2,
…
,ω
n
]。
[0026]
步骤3.5:通过矩阵方程l=(c+1)b
t
得到,实际线长参数矩阵l=[l1,l2,
…
,l
n
],将全部档距进行实际线长累加,得到所属类别的实际线长,将各类组别修正后的线长叠加得到输电线路实际总线长l
sum
。
[0027]
所述步骤四中,基于修正线长l
sum
的行波法故障定位具体特征如下:
[0028]
将输电线路实际总线长l
sum
应用行波测距公式进行故障定位,得到距离测量端的理论故障位置l
x
,通过输电线路实际总线长l
sum
与总水平档距l
sum
对应关系进行故障位置修正,得到距离输电线路测量端的实际故障位置l
x
。
[0029]
本发明一种面向行波故障定位的线长修正方法,技术效果如下:
[0030]
该方法考虑到线路弧垂的变化会导致实际线长与固定线长参数存在数值误差,从而导致故障定位精度的降低,提出基于实际线长修正的行波故障定位方法。面向输电线路在线监测,针对定时更新拍摄的线路图片,通过图像识别法获取对应档距内线路最低点位置,应用斜抛物线方程计算应比系数k初始值、应用导线悬链线方程修正k值,综合多类型档距下应比系数与全线精确档距分布实现实际线长修正,进而通过实际线长与水平档距的对应关系进行故障位置修正。该方法提高了故障定位精度,在进行故障定位可减小人力、物力损耗,精确排除故障点。
附图说明
[0031]
图1(a)为线路处理效果图一(灰度图像);
[0032]
图1(b)为线路处理效果图二(高斯噪声图像);
[0033]
图1(c)为线路处理效果图二(中值滤波图像);
[0034]
图1(d)为线路处理效果图二(自适应滤波图像)。
[0035]
图2(a)为直角坐标系建立示意图一(图片降噪图);
[0036]
图2(b)为直角坐标系建立示意图二(数学示意图)。
[0037]
图3为完整输电线路示意图。
[0038]
图4为架空线路示意图。
[0039]
图5为直角坐标系示意图。
[0040]
图6为输电线路仿真模型。
[0041]
图7为距离测量端20km小波变换波形图。
[0042]
图8为距离测量端25km小波变换波形图。
[0043]
图9为距离测量端40km小波变换波形图。
具体实施方式
[0044]
一种面向行波故障定位的线长修正方法,具体包括以下步骤:
[0045]
s1:根据供电公司提供的输电线路数据,分析架空线路高差参数的绝对值组成,以3m为间隔进行组别分类。将杆塔高差绝对值记为h
i
(i=1,2,
…
,n),建立该输电线路高差矩阵a=[h1,h2,
…
,h
n
],将每个高差对应的输电线路水平档距记为l
i
(i=1,2,
…
,n),建立输电线路档距矩阵b=[l1,l2,
…
,l
n
]。
[0046]
s2:对装设图像识别设备的线路进行拍照,对获取的图像通过正视校正技术进行输电线路的特征提取与选择。考虑到电力巡线拍摄图像的复杂性,为了提取更加精确的输电线路特征,需要对获取的输电线路图像进行滤波降噪处理。如图1(a)、图1(b)、图1(c)所示,分别展示了线路的灰度图像、添加高斯噪声的图像以及经过滤波降噪处理后的图像。可以发现相比于中值滤波处理,经过自适应滤波降噪处理后的图像可以有效地消除孤立噪声点,对于影像的边缘也提供了较好的保护,为后续的图像特征提取准备了良好的先决条件。
[0047]
将经过滤波降噪后的图像继续进行二值化以及边缘检测处理,提取线路、杆塔及其悬挂点,将其处理为数学示意图,过程如图2(a)、图2(b)所示。继而对截取包含杆塔a悬挂点的部分线路段进行图像分析,并以该悬挂点为坐标轴原点建立直角坐标系,得到线路状态方程,根据水平档距参数,恢复完整输电线路。图3所示为完整输电线路数学示意图,通过线路状态方程(1)可以得到线路的最大弧垂参数:
[0048][0049]
式(1)中,l为输电线路水平档距,通过输电线路参数水平档距l、高差h,根据公式(2)得到公式(1)中的高差角β:
[0050][0051]
公式(1)中的k为应比系数,通过导线参数比载γ、水平应力σ0与实际线长l之间的关系,设立应比系数
[0052]
根据公式(3)得到架空线路杆塔a悬挂点到导线最低点垂直距离y
oa
,该垂直距离即为导线最低点纵坐标y1。
[0053][0054]
根据垂直距离y
oa
与线路状态方程得到导线最低点横坐标x1,该横坐标即为导线最
低点到线路杆塔a悬挂点的水平距离l
oa
,继而根据输电线路档距参数l=l
oa
+l
ob
,得到导线最低点到线路杆塔b悬挂点的水平距离l
ob
。
[0055]
通过已知悬链线线长公式(4),确定输电线路实际线长需要以下参数。通过供电公司提供的单条输电线路相关参数可以确定导线型号、水平档距l、杆塔高度等信息,通过杆塔高度即可确定高差h。
[0056][0057]
式(4)中,l为档距内实际线长,l为输电线路水平档距,h为两端悬挂点高差,γ为输电线路比载,σ0为水平应力。
[0058]
考虑到导线负荷电流与其热效应,外界环境温度、天气变化等等因素影响线路弧垂发生变化,造成应比系数k值随之变化,影响输电线路的实际线长,导致故障位置发生改动。因此将通过修正导线应比系数k值得到输电线路的实际线长,进而实现精确故障定位。
[0059]
如图5所示,通过所述图像识别法确定杆塔a悬挂点为坐标轴原点,建立直角坐标系。以此坐标系确定导线最低点到两杆塔悬挂点之间的水平距离l
oa
、l
ob
。根据斜抛物线的导线最低点到悬挂点水平距离公式(5),将图像识别法所得水平距离l
oa
、l
ob
代入,得到应比系数k的初始值。
[0060][0061]
根据悬链线的导线最低点到悬挂点水平距离公式(6),应用所得应比系数k的初始值,进行系数k的修正,重新得到图像识别法确定的水平距离l
oa
、l
ob
,以此获得应比系数k的修正值。
[0062][0063]
应用得到的应比系数k的修正数值,将其应用到悬链线线长公式(7),从而得到单个档距内的实际线长l
i
。
[0064][0065]
通过得到的单个档距实际线长建立实际线长参数矩阵l=[l1,l2,
…
,l
n
]。
[0066]
s3:由于架空线路全线装设图像识别设备成本过高,因此假设在输电线路的第m、p、k三个档距装设有图像识别设备,通过s2得到这三个档距内的实际线长l
m
、l
p
、l
k
。由第i个档距内的实际线长l
i
与固定线长l
i
建立第i个档距的线长误差参数
可得到第m、p、k三个档距的线长误差参数ω
m
、ω
p
、ω
k
,建立档距误差参数矩阵c=[ω1,ω2,
…
,ω
n
]。建立线长误差参数ω
i
与高差绝对值h
i
比值参数可得第m、p、k三个档距的比值参数k
m
、k
p
、k
k
,根据k
m
、k
p
、k
k
三个比值参数得到一个平均比值参数通过矩阵方程c=k
av
a,得到完整的档距误差参数矩
[0067]
阵c=[ω1,ω2,
…
,ω
n
]。
[0068]
通过矩阵方程(8)l=(c+1)b
t
得到完整实际线长参数矩阵l=[l1,l2,
…
,l
n
]:
[0069][0070]
将全部档距进行实际线长累加,得到所属类别的实际线长,将各类组别修正后的线长叠加得到输电线路实际总线长l
sum
。
[0071]
s4:将实际总线长l
sum
代入公式(9)单端行波测距算法进行故障定位,得到距离测量端的理论故障位置l
x
。
[0072][0073]
式(9)中,t1为一端行波检测装置首先感应到故障行波初始波头的时刻,t2为同一检测点获取的故障点第一次同极性反射波时刻,t4为同一检测点获取的故障点第一次反射性反射波时刻,根据公式(10),通过输电线路实际总线长l
sum
与水平档距l
sum
对应关系进行故障位置修正,得到距离输电线路测量端的实际故障位置l
x
。
[0074][0075]
式(10)中,l
x
为距离测量端的实际故障位置;l
sum
为输电线路总水平档距。
[0076]
算例1:
[0077]
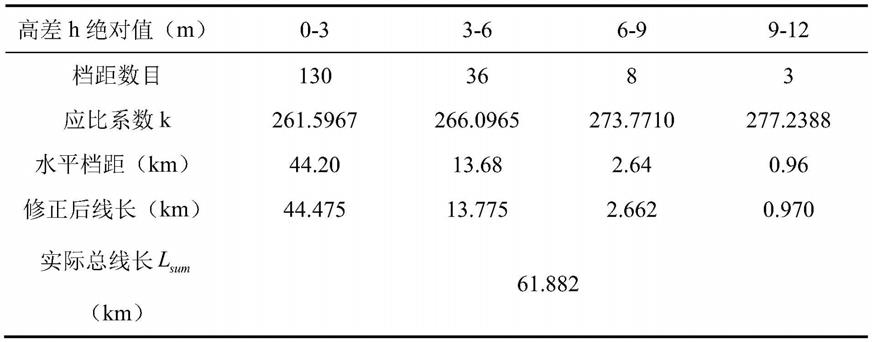
根据某供电公司提供的架空输电线路相关数据,线路水平档距为61.48km,将组成输电线路水平距离的177个档距,按其两端悬挂点高差绝对值3m为一个间隔,分为以下4组,具体结果见表1。分别对各类组别进行应比系数k的修正。得到各类组别实际线长,叠加得到实际总线长l
sum
。
[0078]
表1实际线长修正
[0079][0080]
考虑到行波测距误差为300m,根据所提实际线长修正策略可得水平档距为61.48km的输电线路实际线长为61.882km,其长度差距为402m,超过行波测距误差300m,故可以进行故障位置修正。
[0081]
算例2:
[0082]
根据某供电公司提供的线路数据在pscad软件中搭建如图6所示220kv输电线路仿真模型,系统采用双端供电,通过单端法对其进行故障定位修正仿真验证。
[0083]
设定分别在距离测量端5km,10km,20km,25km,35km,40km,50km处发生a相接地短路故障f
n
(n=1~7),过渡电阻为40ω;故障发生时刻为0.096s,选取haar小波基对故障电流行波进行小波变换分析,选取相应长度数据窗。当没有背侧线路时,检测端感应到的首次反极性反射波均为对端反射波,以此进行行波测距故障定位。
[0084]
图7为例说明实际测距距离测量端20km发生故障f3时的信号提取波形图,检测装置可感应到不同极性的故障行波时刻t1、t2和t4。
[0085]
图8为例说明实际测距距离测量端25km发生故障f4时的信号提取波形图,检测装置可感应到不同极性的故障行波时刻t1、t2和t4。
[0086]
图9为例说明实际测距距离测量端40km发生故障f6时的信号提取波形图,检测装置可感应到不同极性的故障行波时刻t1、t2和t4。
[0087]
将t1、t2和t4时刻整理,应用对端母线反射波测距算法求得故障距离,得到距离测量端全部故障定位结果如表2所示。
[0088]
表2故障位置修正
[0089][0090][0091]
对比分析表2理论测距结果、修正故障位置与供电公司提供架空线路数据可知,通过实际线长的修正,可以得到更精确的故障位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1