基于隧道磁阻效应和离子电导技术的扫描成像系统及方法与流程
1.本发明涉及扫描离子电导显微镜及扫描电化学池显微镜,具体为基于隧道磁阻效应和离子电导技术的扫描成像系统及方法。
背景技术:
2.显微技术水平的高低决定了人类科技在空间尺度下的研究边界,是生命科学、电化学等前沿领域发展的基础和必需工具。多年来,人们基于声、光、电等研发了各种各样的显微镜,它们大大促进了相关领域的发展,但同时也都存在一定的局限性。传统的光学显微镜(om)发展成熟、应用广泛,但是其分辨率较低,难以满足高分辨率使用要求;超分辨率荧光显微技术打破了光学衍射极限的限制,但是样本需要做荧光处理,无法实现细胞的“原位”成像;电子显微镜(em)分辨率很高,但是需要对样本进行处理,而且需要在真空环境下使用,无法对活细胞进行成像。近年来,以原子力显微镜(afm)为代表的扫描探针显微镜(spm)在测量领域中得到广泛应用,但afm是基于原子力进行反馈控制,可能会导致样本表面被划伤或变形。
3.扫描离子电导显微镜(scanning ion conductance microscopy,sicm)和扫描电化学池显微镜(scanning electrochemical cell microscopy,seccm)作为spm家族的新成员,以尖端开口几纳米到几百纳米的玻璃移液管作为扫描检测的传感探针,通过检测离子电导回路的电流大小实现探针尖的精密定位,通过记录分析离子电流或氧化还原电流,实现原位、非接触条件下的样本纳米级三维形貌、电化学、力学等信息的同时检测。然而,现有生命科学、材料科学等研究领域已从传统的静态研究发展到动态研究,对时间分辨率提出了更高的要求。提高扫描离子电导检测技术的时间分辨率,在生命科学领域有助于人们更好地分析细胞增殖、分化和迁移等动态行为、观测细胞表面电荷的动态分布变化、探究免疫细胞的生理行为、监测细胞表面蛋白分布及其动态变化、观察药物对细胞的作用机理等。在电化学测量领域,有利于开展纳米电极材料界面上的形貌变化、电荷转移过程等研究,对于理清界面结构、组成、电荷转移和电催化等结构
‑
功效关系、深入探究材料界面反应动力学和内在机理具有重要科学价值。但是,当前扫描离子电导检测技术在动态、高速捕捉关键信息方面仍很难满足应用要求。
4.目前扫描离子电导检测技术大多采用的是跳跃模式,即探针从z向起始位置下探至样本表面附近,记录此时探针的位置和离子电流(或氧化还原电流)信息,然后回撤至z向起始位置并水平移动至下一个点,进行下一个点的下探检测,如此重复直至完成所有预设点的扫描。跳跃模式可以有效避免扫描复杂样本时探针与样本发生碰撞,但同时由于需要多次进行z向的下探,探针的运动有许多为“冗余路径”,这大大增加了扫描检测所需要的总时间。多年来人们为了提高扫描离子电导检测技术的速度做了大量努力,目前提高扫描速度的研究主要分为“轨迹规划”和“提高接近速度”两大类。轨迹规划方法实质是缩短扫描路径,也就是减少扫描像素点数目和缩短接近路径,如预扫描法、欠采样法,此类方法通常需要通过预扫或其它方法获得扫描地形的先验知识,因此很难适应形貌未知的复杂扫描目
标。提高接近速度的方法主要包含接近控制算法改进和硬件改进法两大类,如混合扫描法、双压电陶瓷法、设计高频压电陶瓷驱动机构、过冲补偿法、速度控制算法等。
5.上述这些提速方法虽然能一定程度上提高扫描速度,但是通过分析扫描离子电导检测技术的检测原理可知,当探针距离样本的距离小于移液管尖端开口直径(一般为几纳米到几百纳米)时,回路中离子电流才会有变化,控制算法才能对探针的接近动作反馈,使探针减速至静止。由于扫描探针驱动和负载是一个较大的惯性系统,在很小的距离内扫描机构从高速运动到静止的制动通常会附加一个很大的惯性力,从而使驱动结构产生微变形,导致探针过冲碰撞,甚至破碎。
技术实现要素:
6.为解决现有技术中存在的问题,本发明的目的在于提供了一种基于隧道磁阻效应和离子电导技术的扫描成像系统及方法,本发明能够扩大扫描探针的反馈区间,解决扫描离子电导检测设备扫描速度慢的问题,大大提高了此类设备的扫描速度。
7.本发明的目的是通过以下技术方案来实现:
8.基于隧道磁阻效应和离子电导技术的扫描成像系统,包括上位机、主控制器、信号发生采集器、三维运动模块、微磁极探针、离子电流电路、电流放大器和tmr传感器;
9.三维运动模块包含有x向压电陶瓷、y向压电陶瓷和z向压电陶瓷以及用于驱动x向压电陶瓷、y向压电陶瓷和z向压电陶瓷运动的驱动系统,驱动系统与上位机连接;
10.微磁极探针安装于三维运动模块的z向压电陶瓷上,微磁极探针包括外壁和设置于外壁内并将外壁的内腔划分为第一通道和第二通道的隔板,第二通道内腔的底部设置有磁性物质;
11.离子电流电路的样本电极和tmr传感器均与电流放大器连接,电流放大器与信号发生采集器的ad模块连接,信号发生采集器的da模块与离子电流电路的样本电极以及探针电极连接;
12.信号发生采集器与主控制器连接,主控制器和三维运动模块与上位机连接。
13.优选的,所述磁性物质采用钕铁硼粉末或四氧化三铁粉末。
14.优选的,所述微磁极探针为双通道玻璃管拉制而成的探针,磁性物质设置于第二通道的尖端。
15.优选的,所述微磁极探针的开口半径为10纳米到500纳米。
16.优选的,微磁极探针上第二通道一侧的外壁靠近z向压电陶瓷,第一通道设置在远离z向压电陶瓷的一侧。
17.本发明还提供了基于隧道磁阻效应和离子电导技术的扫描成像方法,采用本发明如上所述的基于隧道磁阻效应和离子电导技术的扫描成像系统进行,包括如下过程:
18.将离子电流电路的探针电极设置于第一通道中,并在第一通道中加入离子溶液,样本电极设置在与探针电极相对的位置;将tmr传感器设置于培养皿中样本的下方;将微磁极探针移动至z向的初始位置;
19.粗定位移动:控制微磁极探针沿z向向下移动,以tmr传感器输出的电流为反馈,使微磁极探针快速运动至距样本表面第一预设距离处,实现微磁极探针的粗定位移动;
20.精确定位移动:待粗定位移动完成后,以离子电流电路的离子电流为反馈,使微磁
极探针低速下探、运动至距离样本表面第二预设距离处,实现微磁极探针的精确定位移动;其中,第二预设距离小于第一预设距离,粗定位移动时微磁极探针的移动速度大于精确定位移动时微磁极探针的移动速度;
21.记录信息:待精确定位移动完成后,记录此时的微磁极探针位置信息、离子电流信息和氧化还原电流信息;
22.扫描点移动:控制微磁极探针移动至下一个扫描点;
23.重复所述粗定位移动、精确定位移动、记录信息和扫描点移动的过程,完成所有扫描点的信息记录;
24.根据记录的所有扫描点的微磁极探针位置信息、离子电流信息和氧化还原电流信息,处理数据得到样本的三维形貌图及电化学信息。
25.优选的,微磁极探针在z向的初始位置由离子电流变化曲线结合样本起伏高度的先验知识确定得到。
26.优选的,根据微磁极探针位置和对应的磁场强度拟合出微磁极探针位置和对应的磁场强度之间的关系曲线,根据该关系曲线控制微磁极探针快速运动至距样本表面第一预设距离处。
27.优选的,所述第一预设距离为微磁极探针开口半径的5~10倍,所述第二预设距离为微磁极探针开口半径。
28.优选的,以tmr传感器输出的电流为反馈,使微磁极探针以10μm/ms~160μm/ms的速率运动至距样本表面第一预设距离处,实现微磁极探针的粗定位移动;
29.待粗定位移动完成后,以离子电流电路的离子电流为反馈,使微磁极探针以0.1nm/ms~50nm/ms的速率下探、运动至距离样本表面第二预设距离处。
30.本发明具有如下有益效果:
31.通过分析,反馈区间窄是限制扫描离子电导探针显微成像速度的根本原因,基于此,本发明基于隧道磁阻效应和离子电导技术的扫描成像系统中,采用的微磁极探针设置为两个通道,分别为第一通道和第二通道,第二通道内腔的底部设置有磁性物质;第一通道可以用来设置探针电极,形成常规的离子电流电路;与磁性物质对应还设置有tmr传感器,tmr传感器在使用时设置在样本下方,用于检测微磁极探针中磁性物质产生的磁场强度,从而以该磁场强度在tmr传感器产生的电流为反馈对微磁极探针进行定位,该结构设计能够扩大微磁极探针的反馈区间,改变了此类设备以往仅用离子电流作为反馈的扫描方式,从根本上解决了扫描离子电导检测设备扫描速度慢的问题,大大提高了此类设备的扫描速度。
附图说明
32.图1是本发明实例中具有双通道的微磁极探针结构示意图;
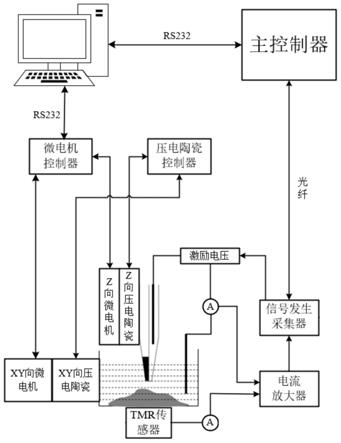
33.图2是本发明实例中基于隧道磁阻效应和离子电导技术的扫描成像系统的结构示意图;
34.图3是本发明实例中基于隧道磁阻效应和离子电导技术的扫描成像方法的流程图。
35.图中:1为外壁,2为第一通道,3为第二通道,4为隔板,5为钕铁硼粉末。
具体实施方式
36.下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
37.通过分析,现有的扫描离子电导显微镜及扫描电化学池显微镜是由于反馈区间小造成了扫描速度慢的问题,为此,本发明提出了一种基于隧道磁阻效应和离子电导技术的扫描成像系统及方法,该系统利用隧道磁阻效应通过引入磁反馈扩大了此类设备的反馈区间,从根本上解决了其扫描速度慢的问题。
38.如图2所示,本发明的基于隧道磁阻效应和离子电导技术的扫描成像系统主要包括pc机、主控制器、信号发生采集器、三维运动模块及微磁极探针。其中pc机主要用于人机交互,主要具有以下功能:
39.1)微电机和压电陶瓷的位置显示及设定
40.显示x、y、z三个方向的微电机和压电陶瓷的实时位置,输入设定x、y、z三个方向的微电机和压电陶瓷的目标位置。
41.2)扫描起始位置的搜索
42.在扫描前需要先搜索样本的大概位置,并且根据先验知识,以搜索位置为基础,加上样本起伏高度的最大量,并留有一定余量,确定扫描时微磁极探针在z向的起始位置。
43.3)扫描参数的设定
44.在扫描成像前进行扫描参数的设定,如扫描点数、扫描点间距、探针起始位置和终止位置、探针停止阈值、扫描速度、探针停留时间、常态激励电压电压大小、变化激励电压信号波形、采样频率。通过自定义扫描参数,可以满足不同的扫描需求。
45.4)扫描数据的预览
46.在扫描过程中,人机交互界面会实时显示离子电流大小及曲线、压电陶瓷位置变化及曲线、样本三维形貌预览,可以帮助我们判断发现扫描过程中的异常情况。
47.5)扫描数据的保存
48.扫描结束后,通过人机交互界面将扫描数据另存为文本数据,以便用matlab数据分析软件进行更深层次的分析。
49.主控制器通过rs232接口与pc机相连,接收由人机交互界面输入的各项动作指令,指令包括压电陶瓷的运动、指定参数下的扫描成像、扫描数据的传输。接收到动作指令后,主控制器通过控制da模块的输出电压驱动压电陶瓷控制器完成对压电陶瓷的运动控制,以信号发生采集器采集到的离子电流信号或tmr传感器输出电流信号为反馈,当离子电流信号或tmr传感器输出电流信号达到各自的设定阈值时,压电陶瓷停止运动。微电机的运动由pc机与微电机控制器通过rs232接口直接相连进行控制。
50.主控制器通过光纤与信号发生采集器通讯,传输信号发生采集器采集到的离子电流、tmr传感器输出电流、氧化还原电流,用于对微电机或压电陶瓷的实时反馈控制,以及保存记录之后传输给pc机用于后续深入分析。同时采用光纤传输可以使信号发生采集器与外界完全隔离,避免了市电系统对信号发生采集器的干扰。
51.信号发生采集器包含有ad模块、da模块和电流放大器。ad模块用于采集电压信号或经电流放大器转换后的电流信号,并将其传输给主控制器。da模块可以输出
±
10v的电压,用于根据需要输出不同波形电压信号,如恒定电压、矩形波和三角波、正弦波等,最常用
的为利用三角波进行循环伏安曲线的测试,以获取样本的电化学活性信息。扫描成像中离子电流、氧化还原电流通常只有pa级甚至更小,因此利用电流放大器对离子电流、tmr传感器输出电流、氧化还原电流进行放大转换,转换后再传输至ad模块进行采集。此外,信号发生采集器利用蓄电池供电,有效保证了其与市电系统的完全隔离。
52.三维运动模块主要包含x、y、z三个方向的微电机和压电陶瓷以及对应的控制器。其中,x、y、z向微电机行程均为15mm,用于微磁极探针的大范围运动。x、y向压电陶瓷行程为100μm,z向压电陶瓷行程为30μm,压电陶瓷用于微磁极探针的高精度运动,压电陶瓷定位精度可达0.1nm。
53.如图1所示,微磁极探针包括外壁1和外壁1中间的隔板4,隔板4将外壁1的内腔分隔为两个通道,即第一通道2和第二通道3。扫描成像时第一通道2中灌注离子溶液并置有ag/agcl电极或其他金属电极,与样本端的电极一起,形成离子电流回路。如图1和图2所示,在第二通道3的尖端,填充有磁性物质钕铁硼粉末5,其可以产生一恒定磁场,通过tmr传感器检测磁场强度,可以对微磁极探针进行定位,其定位精度为亚微米级别。
54.本发明实例中基于隧道磁阻效应和离子电导技术的扫描成像方法,主要包括如下步骤:
55.步骤1,在微磁极探针中的第一通道2灌注离子溶液,并插入金属电极,在另第二通道3中灌注钕铁硼粉末,在样本端接好电极,连接好偏置电压、tmr传感器、电流放大器回路,检查压电陶瓷、微电机、离子电流、tmr传感器输出电流信号是否正常;
56.步骤2,搜索确定扫描初始位置。在人机交互界面设定搜索速度和停止判断方式及阈值大小,然后压电陶瓷和微电机开始互相配合进行下探运动,当z向压电陶瓷走完一个行程(30μm)后,如果未达到样本附近,则pc机通过rs232接口驱动微电机控制器控制z向微电机向下运动25μm,同时z向压电陶瓷回退至最高点,开始下一个行程的搜索检测。如此往复进行,直至微磁极探针运动至样本表面附近(距离约为探针开口半径大小,一般为10纳米到500纳米)。之后结合先验知识预估样本最大起伏量,在压电陶瓷当前位置上加上该起伏量,再留1~5μm的余量,避免探针与样本发生碰撞,致使探针碎裂,扫描失败。
57.微磁极探针下探过程中的反馈控制分为两部分,分别为tmr传感器输出电流反馈控制和离子电流反馈控制。tmr传感器输出电流反馈控制的原理是:根据微磁极探针位置和对应的磁场强度,可以拟合出二者的关系曲线,根据该曲线可在微磁极探针高速下探过程中进行粗定位,使其运动至距离样本表面为微磁极探针开口半径的5~10倍处。离子电流反馈控制的原理是:离子电流只有在微磁极探针距离样本小于探针开口半径时才会变化,因此利用离子电流变化曲线可以对微磁极探针进行精确定位,使其运动至距离样本表面为探针开口半径处(通常为10纳米到500纳米)。
58.步骤3,在人机交互界面进行扫描参数的设定,例如扫描点数、扫描点间距、探针起始位置和终止位置、探针停止阈值、扫描速度、探针停留时间、常态激励电压电压大小、变化激励电压信号波形、采样频率。扫描点数和扫描点间距共同决定了扫描幅面的大小,扫描点间距直接影响到扫描结果的精细程度。在允许范围内(快速阶段10
‑
160μm/ms、低速阶段0.1nm/ms~50nm/ms)将扫描速度尽可能增大,但是扫描速度过快可能会导致成像质量下降,甚至是探针与样本碰撞碎裂。同时可以控制微磁极探针在运动至样本附近时停留一段时间,进行物质投递、循环伏安曲线检测、电荷测量、样本刚度检测等动作。
59.步骤4,参数设定完毕后开始扫描。首先以tmr传感器输出电流为反馈,微磁极探针在z向进行高速(10
‑
160μm/ms)下探,当微磁极探针运动至距离样本表面为微磁极探针开口半径的5~10倍时,以离子电流为反馈,微磁极探针在z向进行低速(0.1nm/ms~50nm/ms)下探,直至运动至距离样本表面为探针开口半径(通常为10纳米到500纳米)处,记录下此时的微磁极探针位置信息、离子电流信息和氧化还原电流信息,微磁极探针快速回退至z向初始位置,并沿x轴或y轴运动至下一个扫描点,重复以上步骤直至完成所有扫描点的检测成像。
60.步骤5,在人机交互界面读取扫描结果数据及过程数据,另存为文本并在matlab数据分析软件处理数据得到样本的三维形貌图及电化学信息。
61.综上,本发明的微磁极探针由双通道玻璃管拉制而成,并在一个通道尖端填充有钕铁硼磁性粉末,相对应的在样本下方配有tmr传感器,用于检测微磁极探针产生的磁场强度从而以tmr传感器输出电流为反馈对微磁极探针进行定位,扩大了微磁极探针的反馈区间,改变了此类设备以往仅用离子电流作为反馈的扫描方式,从根本上解决了扫描离子电导检测设备扫描速度慢的问题,大大提高了此类设备的扫描速度。主控制器以fpga为核心,可以监测tmr传感器输出电流和离子电流的变化,自动拟合出tmr传感器输出电流大小与微磁极探针的位置关系曲线,并且按照设定的阈值,自动切换反馈方式,对三维运动模块的微电机和压电陶瓷的运动进行智能控制,从而实现微磁极探针既能高速下探,又可以保证其纳米级的定位精度。本发明基于隧道磁阻效应和离子电导技术的扫描成像方法,以tmr传感器输出电流和离子电流为复合反馈控制微磁极探针的运动。首先以tmr传感器输出电流为反馈,使微磁极探针在z向进行高速下探,当微磁极探针运动至距离样本表面为微磁极探针开口半径的5~10倍时,以离子电流为反馈,微磁极探针在z向进行低速下探,直至运动至距离样本表面约几纳米处,记录下此时的微磁极探针位置信息、离子电流信息、氧化还原电流信息,完成该点的扫描。然后微磁极探针快速回退至z向初始位置,并沿x轴或y轴运动至下一个扫描点,重复以上步骤进行下一个点的扫描,直至完成所有扫描点的检测成像,处理以上数据得到样本的三维形貌图及电化学信息。该方法可以在保留扫描离子电导检测设备原位、非接触、高精度、多维成像优势的同时,解决此类设备目前存在的瓶颈问题,大幅提高其扫描成像速度,在生命科学、医学、电化学、材料学领域具有广阔的应用前景。本发明利用隧道磁阻效应与离子电导检测技术进行融合互补,提出了基于隧道磁阻效应和离子电导技术的扫描成像系统及方法。该系统的扫描探针在距离样本较远时以隧道电流为反馈高速接近样本,在距离样本较近时以离子电流为反馈缓慢接近样本,实现纳米级的检测,从根本上解决扫描离子电导检测技术扫描速度慢的问题,大大提高扫描离子电导检测设备的检测速度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1