一种基于毫米波雷达的静止目标提取方法及系统与流程
1.本发明涉及汽车雷达的技术领域,尤其涉及一种基于毫米波雷达的静止目标提取方法及系统。
背景技术:
2.随着汽车行业的发展,雷达等传感器在汽车上的应用愈发受到用户和厂家关注,目前,车载角雷达广泛用于目标识别、报警等应用,但受限于检测精度,存在漏检和误检的概率,另外角雷达的探测距离有限,使得在高速时路沿、围栏等静止目标边缘检测率不高,对匝道护栏、花坛边缘等曲率较大的边缘更难识别。
技术实现要素:
3.本发明为解决当前汽车行驶时对道路静止目标检测精度低的技术问题,提供一种基于毫米波雷达的静止目标提取方法及系统。
4.为解决上述技术问题,本发明的技术方案如下:
5.一种基于毫米波雷达的静止目标提取方法,所述方法包括:
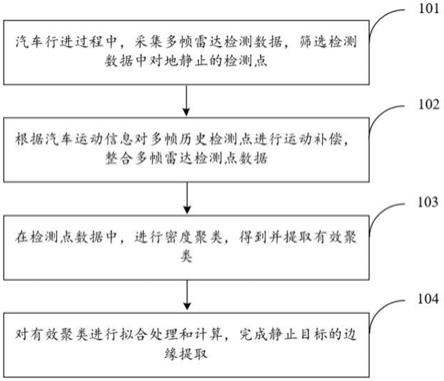
6.汽车行进过程中,采集多帧雷达检测数据,筛选检测数据中对地静止的检测点;
7.根据汽车运动信息对多帧历史检测点进行运动补偿,整合多帧雷达检测点数据;
8.在检测点数据中,进行密度聚类,得到并提取有效聚类;
9.对有效聚类进行拟合处理和计算,完成静止目标的边缘提取。
10.进一步的,所述在检测点数据中,进行密度聚类,得到并提取有效聚类具体包括:
11.检测点数据中的两个检测点之间位置波门处于预设值内,将两个聚为一类,将所有检测点进行聚类;
12.对聚类中的点数量进行判定,若聚类中的点数量满足点数量要求,则认定为有效聚类,否则舍弃。
13.进一步的,所述波门预设值为2.5
±
0.5m,所述聚类中的点数量要求值为15
±
5个。
14.进一步的,所述对有效聚类进行拟合处理和计算,完成静止目标的边缘提取包括:
15.采用多项式拟合对有效聚类中的点进行拟合,提取静止目标的表达式;
16.根据拟合得到的表达式与聚类点的实际位置的重合度来判断拟合结果的有效性,若误差满足预设范围值,将该表达式提取为静止目标的有效表达式,否则,重新密度聚类、拟合操作。
17.进一步的,所述预设范围值为误差小于1
±
0.8m。
18.进一步的,所述雷达检测数据包括检测点的位置信息、速度信息、角度信息。
19.进一步的,所述筛选检测数据中对地静止的检测点包括:
20.根据本车行驶的车速以及检测点的相对速度大小,对雷达检测到的检测点进行筛选,筛选出对地相对静止的检测点;其中,对地相对静止的检测点为对地速度小于1m/s的检测点。
21.进一步的,所述运动补偿为根据历史帧本车位置以及当前帧本车位置对历史帧进行运动补偿。
22.进一步的,所述整合多帧雷达检测点数据包括:
23.将经过运动补偿后的多个历史帧与当前帧进行整合,得到目标特征识别更稳定的检测点数据。
24.另外的,本发明还提供一种基于毫米波雷达的静止目标跟踪系统,该系统包括角雷达和处理器,所述处理器接收角雷达检测到的检测信息,并执行上述的基于毫米波雷达的静止目标提取方法。
25.本发明通过点云收集、运动补偿、聚类和拟合来实现对静止目标的边缘提取,其可提取任意曲率的路沿或者围栏,且可自检提取的有效性,并自适应修正提取结果,从而通过路沿、围栏等静止目标的边缘提取,帮助车辆识别场景,有助于提高报警应用的正确率,降低静止目标附近虚假检测目标的误报率。
附图说明
26.图1为本发明实施例中基于毫米波雷达的静止目标提取方法的结构流程图。
27.图2为本发明实施例中基于毫米波雷达的静止目标提取方法的其中一个示例的流程图。
具体实施方式
28.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
29.本技术实施例的附图中相同或相似的标号对应相同或相似的部件;在本技术的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制。
30.此外,若有“第一”、“第二”等术语仅用于描述目的,主要是用于区分不同的装置、元件或组成部分(具体的种类和构造可能相同也可能不同),并非用于表明或暗示所指示装置、元件或组成部分的相对重要性和数量,而不能理解为指示或者暗示相对重要性。
31.图1示出了基于毫米波雷达的静止目标提取方法的结构流程图。
32.如图1所示,本实施例提供了一种基于毫米波雷达的静止目标提取方法,该方法主要用于通过汽车的角雷达来对汽车行驶道路上的栏杆、围栏或路沿等对地静止且有延续性的道路建筑进行识别检测并进行提取,帮助车辆识别场景,提高汽车报警的正确率。具体的,该方法包括:
33.101、汽车行进过程中,采集多帧雷达检测数据,筛选检测数据中对地静止的检测点;其中,该雷达检测数据即雷达所检测到的检测点的信息总合,具体包括有检测点的位置信息、速度信息、角度信息。
34.优选的,上述的步骤中,筛选检测数据中对地静止的检测点具体包括:根据本车行
驶的车速以及检测点的相对速度大小,对雷达检测到的检测点进行筛选,筛选出对地相对静止的检测点;其中,对地相对静止的检测点为对地速度小于1m/s的检测点。
35.该筛选过程中,对地静止的检测点的筛选需要利用本车行驶时的车速来进行校正,筛选时,根据本车行驶的车速以及检测点的相对速度大小,筛选出对地速度小于1m/s的检测点,认定其为静止目标。例如,角雷达检测50
±
10m内的检测点后,对检测点的速度值进行补偿,补偿本车速度后小于1
±
0.2m/s的检测点,则可以认定为对地静止的检测点。具体的,检测点的对地速度=检测点相对速度+本车速度*cos(检测点角度)。
36.102、根据汽车运动信息对多帧历史检测点进行运动补偿,整合多帧雷达检测点数据;其中,由于历史帧检测点位置信息是相对历史帧本车位置的坐标,因此,在当前帧中,需要对历史帧进行点迹补偿,补偿本车在当前帧与历史帧之间本车运动的历史距离,以还原静止目标在不同时刻的相对位置。因为静止目标对地位置不变,所以通过多帧点的运动位置补偿后,可以解决雷达一帧内得到的检测点少且不均匀的问题,且之后的目标特征识别更稳定。
37.为了更好的理解,提供本实施例具体补偿示例,例如,汽车角雷达在t时刻获取到静止目标a相对本车的位置坐标target(x
t
,y
t
),而本车对地的行驶轨迹为(sx
t
,sy
t
),行驶角度为sθ
t
,此时静止目标a的对地坐标为target(abs_x
t
,abs_y
t
);
38.其中:
39.abs_x
t
=sx
t
+y
t
*sin(sθ
t
)+x
t
*cos(sθ
t
);
40.abs_y
t
=sy
t
+y
t
*cos(sθ
t
)
‑
x
t
*sin(sθ
t
);
41.t+1时刻本车直行的行驶轨迹更新为(sx
t+1
,sy
t+1
),行驶角度为sθ
t+1
,则静止目标a当前时刻相对本车的位置坐标更新为target(x
t+1
,y
t+1
);
42.其中:
43.x
t+1
=(abs_x
t
‑
sx
t+1
)*cos(sθ
t
)
‑
(abs_y
t
‑
sy
t+1
)*sin(sθ
t
);
44.y
t+1
=(abs_x
t
‑
sx
t+1
)*sin(sθ
t
)+(abs_y
t
‑
sy
t+1
)*cos(sθ
t
)。
45.在运动位置补偿后,处理器将经过运动补偿后的多个历史帧与当前帧进行整合,从而得到目标特征识别更稳定的检测点数据,并整合为雷达检测数据,后续的聚类和拟合以雷达检测数据作为基础。
46.当然,在后续操作过程中,为了更好的针对围栏、路沿等静止目标进行检测,可以对雷达检测数据进行进一步筛选,此次筛选主要用于筛选有效范围内的点,从雷达检测数据中提取距离100
±
50m内的点。
47.103、在检测点数据中,进行密度聚类,得到并提取有效聚类。
48.优选的,该步骤具体包括:
49.检测点数据中的两个检测点之间位置波门处于预设值内,将两个聚为一类,将所有检测点进行聚类;
50.对聚类中的点数量进行判定,若聚类中的点数量满足点数量要求,则认定为有效聚类,否则舍弃。
51.其中,密度聚类会设定一个波门值,若两个检测点之间的距离处于该波门值内,则可以认定两个点属于同一个聚类,根据这种判断方式对检测点数据中的检测点进行聚类,得到多个聚类。值得注意的是,若a点与b点为同类,b点和c点为同类,则a、b、c三点均为同一
类。
52.具体的,具体的聚类数值方面,聚类的检测点位置波门ε1设为2.5
±
0.5m,检测点速度波门ε2设为1
±
0.2m/s,即通过计算两两之间的直线距离δd及速度差δv,若满足δd<ε1且δv<ε2,则该两点聚为一类。
53.在聚类完成后,进行有效聚类进行提取,由于栏杆、路沿等静止目标为拥有较长延续长度的目标,因此,若聚类的点个数小于一定数值,可认定为其非栏杆、路沿等静止目标。具体的,若聚类中的点的数量满足15
±
5个以上,即满足下面的拟合要求;否则舍弃。具体的聚类点数目可以根据检测精度需求进行合理的调整。
54.104、对有效聚类进行拟合处理和计算,完成静止目标的边缘提取。其中,对有效类中的点用多项式拟合方法,得到边缘提取的表达式,并对表达式进行验证,最终确定边缘提取的有效表达式,完成该静止目标的边缘提取。
55.在一些实施例中,步骤104对有效聚类进行拟合处理和计算,完成静止目标的边缘提取具体包括:
56.采用多项式拟合对有效聚类中的点进行拟合,提取静止目标的表达式;
57.根据拟合得到的表达式与聚类点的实际位置的重合度来判断拟合结果的有效性,若误差满足预设范围值,将该表达式提取为静止目标的有效表达式,否则,重新密度聚类、拟合操作。
58.其中,处理器根据拟合得到的表达式与聚类点的实际位置的重合度来判断拟合结果的有效性。判断过程中,若满足误差满足预设范围值,则路沿、围栏等边缘提取成功,否则重新进入步骤103进行聚类拟合操作,直到所有点处理完毕。具体的,上述预设范围值为误差小于1
±
0.8m。
59.为了更好的操作体验,提供本实施例一个具体提取步骤,请参阅图2,处理器通过角雷达进行点云提取,即提取角雷达所检测到的检测点信息,并进行运动补偿进行筛选。筛选过程中,对检测点的数量进行检测,若检测点过少,则放弃边缘提取,若检测点符合要求,进行密度聚类、拟合,最终对拟合的效果进行判断,得到最终有效表达式,完成静止目标的提取。
60.本实施例的好处在于,本方法通过点云收集、运动补偿、聚类和拟合来实现对静止目标的边缘提取,其可提取任意曲率的路沿或者围栏,且可自检提取的有效性,并自适应修正提取结果,从而通过路沿、围栏等静止目标的边缘提取,帮助车辆识别场景,有助于提高报警应用的正确率,降低静止目标附近虚假检测目标的误报率。
61.另外的,本实施例还提供一种基于毫米波雷达的静止目标提取系统,该系统包括角雷达和处理器,其中,处理器接收角雷达检测到的检测信息,并执行以上基于毫米波雷达的静止目标提取方法的相关步骤,以实现路沿、围栏等静止目标边缘的提取。
62.显然,本发明的上述实施例仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1