一种智能教练车踏板位置检测装置及方法与流程
1.本发明涉及智能驾驶技术领域,尤其是一种智能教练车踏板位置检测装置及方法。
背景技术:
2.随着电子信息技术和人工智能技术的飞速发展,教练车的智能化程度逐渐提高。油门踏板、刹车踏板和离合踏板的相互配合是新学员学车过程中的难点。为了对学员进行针对性训练,提高训练效率,需要对学员操作过程中的踏板位置实时准确检测,以便反馈给车载电脑。
3.传统的踏板位置检测方法有两种:一种是在踏板上安装倾角仪,另外一种是在轴承上安装旋转编码器。倾角仪容易受到车辆震动和磁场的影响,导致检测不准确;旋转编码器检测精度较高,但是需要对原车进行较大改装,安装不方便。本发明提出的踏板位置检测装置及方法,能够实时、准确、方便检测出踏板位置。
技术实现要素:
4.本发明要解决的技术问题是:为了解决现有踏板位置检测装置及方法安装不便以及检测不准确问题,本发明提供了一种智能教练车踏板位置检测装置,包括金属滑环、线性电阻条、弹簧、直流电压源、精密电阻r1、精密电阻r2、程控电阻r
x
、检流计μa和工控机,有效解决了现有上述问题。
5.本发明解决其技术问题所采用的技术方案是:一种智能教练车踏板位置检测装置,包括金属滑环、线性电阻条、弹簧、直流电压源、精密电阻r1、精密电阻r2、程控电阻r
x
、检流计μa和工控机。
6.进一步的,所述线性电阻条固定在踏板臂侧面;所述金属滑环套在踏板臂上,在滑动过程中能够与所述线性电阻条有良好电气接触。
7.进一步的,所述弹簧处于拉伸状态,一端固定在底面上,另一端连接在所述金属滑环上。
8.进一步的,所述线性电阻条的顶端b通过导线连接至直流电压源正极。
9.进一步的,所述程控电阻r
x
首端与直流电压源正极连接,末端与所述精密电阻r2串联后,连接至直流电压源负极;其中,所述程控电阻r
x
具有rs485接口。
10.进一步的,所述检流计μa的正极d通过导线连接至所述金属滑环,负极e连接至所述程控电阻r
x
的末端;其中所述检流计μa具有rs485接口。
11.进一步的,所述精密电阻r1一端与d连接,另外一端与直流电压源负极连接。其中,r1=r2。
12.进一步的,所述工控机通过rs485总线连接至所述程控电阻r
x
和所述检流计μa,能够通过rs485总线发送指令控制所述程控电阻r
x
的大小,能够采集所述检流计μa数据。
13.一种使用上述智能教练车踏板位置检测装置的检测方法,所述检测方法包括3个
步骤:零行程时踏板臂有效电阻测量、满行程时踏板臂有效电阻测量和踏板任意位置检测,(一)零行程时踏板臂有效电阻测量:(1)使踏板不受外力,仅在弹簧的作用下处于行程为零的状态;(2)通过工控机向程控电阻r
x
发送控制指令,使其电阻值r
x
由0开始增大,步长为r1/100ω,则r
x
与时间t之间的关系为r
x
= r1/100* t;(3)在rx变化过程中,通过工控机不断接收检流计μa的电流数据,并取绝对值,按时间顺序将取绝对值后的电流数据组成数列{it};(4)当r
x
的值增大到2r1时,对数列{i
t
}进行二次曲线拟合,得到电流i与时间t的关系为i(t),令,得到电流为零时,t的大小为t0,线性电阻条顶端b与金属滑环a之间的电阻r
ab
= r1/100* t0;(5)重复执行步骤(2)~(4),即可不间断刷新r
ab
的值;(6)多次测量并取均值,得到零行程时踏板臂有效电阻为r
e
;(二)满行程时踏板臂有效电阻测量:(7)使踏板受到外力,处于满行程状态;(8)重复执行步骤(2)~(5);(9)多次测量,并取均值,得到满行程时踏板臂有效电阻为r
f
;(三)踏板任意位置检测:(10)踏板任意位置时,重复执行步骤(2)~(5),得到当前实时有效电阻r
ab
的大小;(11)当前时刻踏板位置可表示为。
14.本发明的有益效果是:本发明提供了一种智能教练车踏板位置检测装置及方法,不需要依赖倾角仪或编码器,能够实时检测出踏板位置。方法精度高,容易实施。
附图说明
15.下面结合附图和实施例对本发明进一步说明。
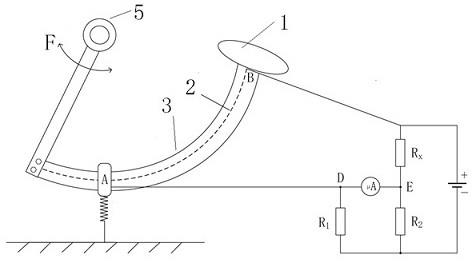
16.图1是本发明的结构示意图。
17.图1中,1.踏板,2.线性电阻条,3.踏板臂, 5.轴承,f.运动方向。
具体实施方式
18.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
19.(一)搭建系统系统包括金属滑环、线性电阻条、弹簧、直流电压源、精密电阻r1、精密电阻r2、程控电阻r
x
、检流计μa和工控机。
20.线性电阻条固定在踏板臂侧面;线性电阻条尽量选用轻薄型,既能与踏板臂完美贴合,又不影响实际操作。
21.金属滑环套在踏板臂上,在踏板转动过程中能够无阻碍自由滑动。在滑动过程中能够与线性电阻条有良好电气接触。
22.弹簧处于拉伸状态,一端固定在底面上,另一端连接在金属滑环上。在弹簧的拉力作用下,金属滑环一直处于弧形踏板臂的最低点。
23.线性电阻条的顶端b通过导线连接至直流电压源正极。直流电压源电压选为5v。
24.程控电阻r
x
首端与直流电压源正极连接,末端与精密电阻r2串联后,连接至直流电压源负极。其中,程控电阻r
x
具有rs485接口,能够接收程序指令,实时改变输出电阻。
25.检流计μa的正极d通过导线连接至金属滑环,负极e连接至程控电阻r
x
的末端;其中检流计μa具有rs485接口,能够将检测出的电流实时反馈到工控机;精密电阻r1一端与d连接,另外一端与直流电压源负极连接。精密电阻要求能够防止温漂,可选择r1=r2=100ω;工控机通过rs485总线连接至程控电阻r
x
和检流计μa的rs485接口,能够通过rs485总线发送指令控制程控电阻r
x
的大小,能够采集检流计μa数据。
26.(二)检测方法检测方法包括3个步骤:零行程时踏板臂有效电阻测量、满行程时踏板臂有效电阻测量和踏板任意位置检测。
27.零行程时踏板臂有效电阻测量:(1)使踏板不受外力,仅在弹簧的作用下处于行程为零的状态;(2)通过工控机向程控电阻r
x
发送控制指令,使其电阻值r
x
由0开始增大,步长为r1/100=100/100=1ω,则r
x
与时间t之间的关系为r
x
= 100/100* t = t。发送指令的频率高低将影响检测的实时性,频率越高,实时性越好。一般建议频率在20hz左右,最高不超过50hz。
28.(3)在rx变化过程中,通过工控机不断接收检流计μa的电流数据,并取绝对值,按时间顺序将取绝对值后的电流数据组成数列{it}。该数列的值具有先减小后增大的特性。
29.(4)当r
x
的值增大到2r1=2
×
100=200ω时,对数列{i
t
}进行二次曲线拟合,得到电流i与时间t的关系为i(t)。令,得到t的大小为t0。线性电阻条顶端b与金属滑环a之间的电阻r
ab
= t0。此步操作的原因是:检流计无论多么精准,总会存在测量误差。且实际操作中,很难确切地找到电流为零的时刻。本发明将测量的电流进行二次曲线拟合,然后求取极值点,能够准确估计到电流为零的时刻t0,通过数学的方法将仪器的测量误差降到最低。进而通过该时刻t0和r
x
的增长模型,准确估计出r
ab
。
30.(5)重复执行步骤(2)~(4),即可不间断刷新r
ab
的值。
31.(6)多次测量并取均值,得到零行程时踏板臂有效电阻为r
e
。
32.满行程时踏板臂有效电阻测量:(7)使踏板受到外力,处于满行程状态,并保持该状态不变。
33.(8)重复执行步骤(2)~(5)。
34.(9)多次测量,并取均值,得到满行程时踏板臂有效电阻为r
f
。
35.踏板任意位置检测:(10)踏板任意位置时,重复执行步骤(2)~(5),得到当前实时有效电阻r
ab
的大小。
36.(11)当前时刻踏板位置可表示为。该数值越大,说明踏板的行程越大。
37.此外,如果踏板臂本身具有线性电阻的特性,本实施例中的线性电阻条可以不用安装,直接测量踏板臂有效电阻即可。方案能更加简化,更容易实施。
38.如果踏板行程与有效电阻r
ab
没有线性关系,则需要先进行标定处理。例如,分别令踏板行程为{0%、10%、20%、30%、40%、50%、60%、70%、80%、90%、100%},测得r
ab
的值分别为{re、r
ab1
、r ab2
、r ab3
、r ab4
、r ab5
、r ab6
、r ab7
、r ab8
、r ab9
、r
f
}。对二者采用3次多项式进行拟合,得到踏板行程p与r
ab
的关系为p=f(r
ab
)。在按照本专利实施过程中,测得r
ab
的精确电阻后,带入p=f(r
ab
)即可得到踏板的当前行程。
39.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1