一种司机控制器机械可靠性的自动检测分析系统
1.发明涉及汽车检测分析技术领域,尤其涉及一种司机控制器机械可靠性的自动检测分析系统。
背景技术:
2.现在的汽车基本都是机电一体化的产品,以机械为运行基础,以电控为控制手段,基本上各种功能都是通过电控系统来实现的,比如发动机运转、自动变速箱换挡、各种刹车辅助功能、电动转向助力、车身稳定控制、空调系统、车身附件控制系统等。为了实现电控功能,在汽车上各个部位安装了各种各样的传感器、执行器以及电子控制单元,它们在工作时需要互相通讯、协调,以便给汽车发出正确的控制指令。如果某一个元器件不能正常工作,或者彼此之间的通讯不畅,就有可能导致汽车电控单元无法得到正确的信息,或者各种信息无法正常沟通传递,进而导致汽车无法顺畅运行,或者某些功能无法实现。
3.司机控制器是由机械联动装置和行程开关组成的产品,是用来操作机车运行的主令机器,其主要利用控制电路的低压电器来间接控制主电路的电气设备。因此,司机控制器的可靠性高低决定了整个列车能否安全运行。根据现行的国家标准,司机控制器往复动作要求105次且每次动作均准确有效。因此,对于司机控制器的生产商和使用者而言,需要采用一种快速可靠的检测分析系统来验证司机控制器在其寿命周期内的机械可靠性。
4.目前,司机控制器的可靠性检测一般是通过搭建简易的定时器和计数器测试平台来实现。然而,这种测试平台存在一些明显的缺点,如:人工参与度高,没有计算设备的参与,需要手动进行检测,极大的增加了检测分析的时间成本
技术实现要素:
5.为了克服现有技术存在的缺点与不足,本发明提供一种司机控制器机械可靠性的自动检测分析系统。
6.本发明中,该系统包括推进系统102、传感器系统104、控制系统106、外围设备108、电源110、计算设备111和用户接口112;
7.本发明中,计算设备111包括处理器113和存储器114,计算设备111是汽车控制器或其控制器的一部分;
8.本发明中存储器114包括可由处理器113执行的指令115,也可以保存地图数据116;
9.本发明中,汽车系统10中电源110向汽车供电,计算设备111用于从推进系统102、传感器系统104、控制系统106和外围设备108接收信息并控制所述系统,计算设备111用于在用户界面112上生成图像显示并从用户界面112接收输入。
10.本发明中,推进系统102用于向汽车提供动力运动,推进系统102包括引擎/电机118、能量源120、传输装置122和车轮124;本发明中,引擎/电机118可以是任何组合,诸如内燃机、电动机、蒸汽引擎或者可
以包括这样的组合;
11.本发明中,能量源120是向引擎/电机118整体或部分地提供动力的能量源,引擎/电机118可以用于将能量源120转换成机械能。能量源120包括汽油、柴油、其他石油燃料、丙烷、其他压缩气燃料、乙醇、太阳能板、电池和其他电力源。另外,或可替代地,能量源120可包括燃料罐、电池、电容器任何组合,能量源120还可以向汽车的其他系统提供能量。
12.本发明中,传感器系统104可以包括若干传感器,该传感器用于检测关于汽车放置的环境的信息,传感器包括全球定位系统(gps)模块126、惯性测量单元(imu)128、无线探测和测距(雷达、radar)单元130、包括激光测距仪和/或光学检测和测距(骑车的人、lidar)单元132、照相机134和用于校正传感器的位置和/或方向的致动器136。传感器系统104还包括监视汽车内部系统的附加传感器。
13.本发明中,惯性测量单元(imu)128是用于基于惯性加速度来检测汽车的位置和方向的变化的传感器;
14.本发明中,无线探测和测距(雷达、radar)单元130是物体检测系统,其可以用于使用电波来确定物体的距离、高度、方向或速度等特性。该单元用来发送电波或微波的脉冲,并且无线电波或微波可以从波的路径中的任何物体反弹,该单元用来为对接收到的信号执行数字信号处理(从物体反弹),或者可以用于识别物体;
15.本发明中,照相机134可以是用于拍摄汽车所放置环境的图像的任何照相机(例如,静止照相机、摄像机等),为此目的,照相机可以用于检测可见光,或者可以用于检测来自诸如红外线或紫外线之类的光谱的其他部分的光,照相机134可以是二维检测器,或者可以具有三维空间距离。
16.本发明中,控制系统106可以用于控制汽车的操作,控制系统106包括导向单元138、节气门140、刹车单元142、传感器扩散系统144、计算机视觉系统146、导航或路径设置系统148、和障碍物避免系统150。
17.本发明中,导向单元138可以是用于调节汽车的方位或方向的机构的任意组合,
18.本发明中,节气门140可以是用于控制引擎/电机118的操作速度和加速度,从而控制汽车的速度和加速度的机构的任意组合;本发明中,刹车单元142可以是用于使汽车减速的机构的任意组合,刹车单元142可以使用摩擦来使车轮/轮胎124低速化。刹车单元142可用于再生式,且车轮/轮胎124的动能可被转换成电流;本发明中,触摸屏154可以由用户使用以向汽车输入命令。为此目的,触摸屏154可以用于通过电容式检测、电阻膜式检测或表面弹性波处理来检测用户手指的位置和运动中的至少一个。触摸屏154可以检测手指在与触摸屏表面平行的方向或同一平面、与触摸屏表面垂直的方向或两者上的运动还可以检测施加到触摸屏表面的压力的水平。触摸屏154可以由一个或多个半透明或透明绝缘层和一个或多个半透明或透明导电层形成。触摸屏154可以采取其他形式。
19.本发明中,无线通信系统152所描述,无线通信系统208可无线地耦合到一个或一个以上其它汽车、传感器或其它实体可以是用于经由直接或通信网络耦合的任何系统。尽管无线通信系统208被示出为位于汽车200的车顶上,但是在其他示例中,无线通信系统208可以总体上或部分地位于其它位置。
20.本发明中,系统通过以下步骤实现可靠性的系统检测。
21.步骤1:司机通过用户界面112向计算设备111下达自动检测分析指令。
22.步骤2:计算设备111在接受指令后接收对汽车整体的控制,向汽车的推进系统102、传感器系统104、控制系统106、外围设备108、电源110下达自动检测分析指令。
23.步骤3:推进系统102、传感器系统104、控制系统106、外围设备108、电源110立即进入自动检测分析模式,检测项目包括汽车所有电路是否故障、发动机运行情况、动力情况。
24.步骤4:推进系统102、传感器系统104、控制系统106、外围设备108、电源110完成自检并将自检参数通过用户界面112反馈给司机。
25.本发明通过将汽车的检查人工控制转移到汽车本身自检适应方法和系统,使得计算设备能够通过驾驶员的指示,接受从手动驾驶模式到自动模式的车辆移动的要求,计算设备可以根据车辆的自动运转动作相关的参数来判断车辆的状态,计算设备可以根据车辆的状态和指示来决定控制转移的对应命令,计算设备可以包括对应于策略和控制移动的时间段,并且可以命令执行车辆控制从手动模式到自动模式的转变,从而缩短检测分析的时间成本。
附图说明
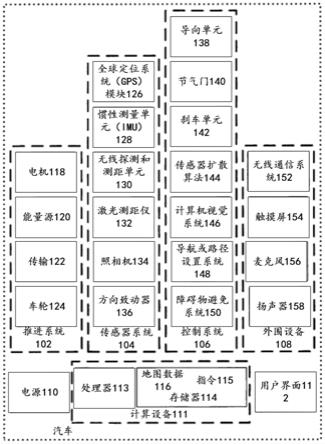
26.图1为本发明自动检测分析的系统图;
27.图2为本发明的实施案例图;
28.图3为本发明系统的自检流程图。
具体实施方式
29.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互结合,下面结合附图和有具体实施例对本技术作进一步详细说明。
30.如图1所示,一种司机控制器机械可靠性的自动检测分析系统,本发明中,该系统包括推进系统102、传感器系统104、控制系统106、外围设备108、电源110、计算设备111和用户接口112;
31.本发明中,计算设备111包括处理器113和存储器114,计算设备111是汽车的控制器或其控制器的一部分;
32.本发明中存储器114包括可由处理器113执行的指令115,也可以保存地图数据116;
33.本发明中,汽车中电源110向汽车供电,计算设备111用于从推进系统102、传感器系统104、控制系统106和外围设备108接收信息并控制所述系统,计算设备111用于在用户界面112上生成图像显示并从用户界面112接收输入。
34.本发明中,推进系统102用于向汽车提供动力运动,推进系统102包括引擎/电机118、能量源120、传输装置122和车轮124;本发明中,引擎/电机118可以是任何组合,诸如内燃机、电动机、蒸汽引擎或者可以包括这样的组合;
35.本发明中,能量源120是向引擎/电机118整体或部分地提供动力的能量源,引擎/电机118可以用于将能量源120转换成机械能。能量源120包括汽油、柴油、其他石油燃料、丙
烷、其他压缩气燃料、乙醇、太阳能板、电池和其他电力源。另外,或可替代地,能量源120可包括燃料罐、电池、电容器任何组合,能量源120还可以向汽车的其他系统提供能量。
36.本发明中,传感器系统104可以包括若干传感器,该传感器用于检测关于汽车放置的环境的信息,传感器包括全球定位系统(gps)模块126、惯性测量单元(imu)128、无线探测和测距(雷达、radar)单元130、包括激光测距仪和/或光学检测和测距(骑车的人、lidar)单元132、照相机134和用于校正传感器的位置和/或方向的致动器136。传感器系统104还包括监视汽车的内部系统的附加传感器。
37.本发明中,惯性测量单元(imu)128是用于基于惯性加速度来检测汽车的位置和方向的变化的传感器;
38.本发明中,无线探测和测距(雷达、radar)单元130是物体检测系统,其可以用于使用电波来确定物体的距离、高度、方向或速度等特性。该单元用来发送电波或微波的脉冲,并且无线电波或微波可以从波的路径中的任何物体反弹,该单元用来为对接收到的信号执行数字信号处理(从物体反弹),或者可以用于识别物体;
39.本发明中,照相机134可以是用于拍摄汽车放置环境的图像的任何照相机(例如,静止照相机、摄像机等),为此目的,照相机可以用于检测可见光,或者可以用于检测来自诸如红外线或紫外线之类的光谱的其他部分的光,照相机134可以是二维检测器,或者可以具有三维空间距离。
40.本发明中,控制系统106可以用于控制汽车的操作,控制系统106包括导向单元138、节气门140、刹车单元142、传感器扩散系统144、计算机视觉系统146、导航或路径设置系统148、和障碍物避免系统150。
41.本发明中,导向单元138可以是用于调节汽车的方位或方向的机构的任意组合,
42.本发明中,节气门140可以是用于控制引擎/电机118的操作速度和加速度,从而控制汽车的速度和加速度的机构的任意组合;本发明中,刹车单元142可以是用于使汽车减速的机构的任意组合,刹车单元142可以使用摩擦来使车轮/轮胎124低速化。刹车单元142可用于再生式,且车轮/轮胎124的动能可被转换成电流。
43.本发明中,图2示出了根据一个实施例的示例性汽车200。特别地,图2示出了汽车200的右侧视图、前视图、后视图和顶视图。在图2中,汽车200被示为小汽车,但是其他例子是可能的。例如,汽车200在其他示例中也可以特别表示卡车、货车、半拖车、自动两轮车、高尔夫球车、越野车或农耕车辆。如图所示,汽车200包括一个传感器单元202、第二传感器单元204、第三传感器单元206、无线通信系统208和照相机210。
44.第一、第二和第三传感器单元202到206可以分别包括全球定位系统传感器、惯性测量单元、雷达单元、骑手单元、照相机、车道检测传感器和声学传感器的任意组合。也可以考虑其他类型的传感器。
45.本发明中,尽管第一、第二和第三传感器单元202被示出为安装在汽车200的特定位置,但是在一些示例中,传感器单元202可以安装在汽车200的内部或外部。此外,虽然仅示出了三个传感器单元,但是在一些例子中,可以在汽车200中包括更多或更少的传感器单元。
46.在一些示例中,第一、第二和第三传感器单元202到206中的一个或多个可以包括
可移动地安装传感器的一个或多个可动挂载。可动式挂载例如也可以包括旋转台。安装在旋转台上的传感器也可以旋转以使得传感器能够从汽车200周围的每个方向获取信息。或者,或者另外,可动式挂载也可以包括倾斜台。安装在倾斜台上的传感器也可以在特定范围的角度和/或方位角中倾斜,以便从各种角度获得信息。可动式挂载也可以采用其他形式。
47.本发明中,在一些示例中,第一、第二和第三传感器单元202
‑
206中的一个或多个是可包括一个或多个致动器,其用于通过移动传感器和/或可移动式挂载来调节传感器单元内的传感器的位置和/或方向。致动器的例子包括电机、空压式致动器、油压活塞、继电器、螺线管以及压电致动器。其他的致动器也可以考虑。
48.本发明中,如上文关于图1的无线通信系统152所描述,无线通信系统208可无线地耦合到一个或一个以上其它汽车、传感器或其它实体可以是用于经由直接或通信网络耦合的任何系统。尽管无线通信系统208被示出为位于汽车200的车顶上,但是在其他示例中,无线通信系统208可以总体上或部分地位于其它位置。
49.本发明中,照相机210可以是用于拍摄汽车200所放置的环境图像的任意照相机(例如,静止照相机、摄像机等)。
50.为了这个目的,照相机210可以采用上文关于图1的照相机134描述的任意形式。尽管照相机210被示出为安装在汽车200的挡风玻璃内,但是在其他示例中,照相机210可以安装在汽车200的内侧或外侧。
51.本发明中,汽车200的控制系统可以用于根据可实现的多个控制策略中的一个控制策略来控制汽车200。控制系统接收来自多个耦合到汽车200(接触或离开汽车200)的传感器的信息,并基于该信息修改控制策略(和相关联的操作行为)可以用于根据修改的控制策略来控制汽车200。控制系统还可以用于监视从传感器接收到的信息并持续地评估运行状况,并且还可以用于基于运行状况的变化来修改控制策略和操作行为。
52.本发明中,系统通过以下步骤实现可靠性的系统检测。
53.步骤1:司机通过用户界面112向计算设备111下达自动检测分析指令。
54.步骤2:计算设备111在接受指令后接收对汽车整体的控制,向汽车的推进系统102、传感器系统104、控制系统106、外围设备108、电源110下达自动检测分析指令。
55.步骤3:推进系统102、传感器系统104、控制系统106、外围设备108、电源110立即进入自动检测分析模式,检测项目包括汽车所有电路是否故障、发动机运行情况、动力情况。
56.步骤4:推进系统102、传感器系统104、控制系统106、外围设备108、电源110完成自检并将自检参数通过用户界面112反馈给司机。本发明通过将汽车的检查人工控制转移到汽车本身自检适应方法和系统,使得计算设备能够通过驾驶员的指示,接受从手动驾驶模式到自动模式的车辆移动的要求,计算设备可以根据车辆的自动运转动作相关的参数来判断车辆的状态,计算设备可以根据车辆的状态和指示来决定控制转移的对应命令,计算设备可以包括对应于策略和控制移动的时间段,并且可以命令执行车辆控制从手动模式到自动模式的转变。
57.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解的是,在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种等效的变化、修改、替换和变型,本发明的范围由所附权利要求及其等同范围限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1