基于动态数据实时适应的航向预测方法
1.本发明涉及语音信号定向角判向技术领域,特别是涉及一种基于动态数据实时适应的航向预测方法。
背景技术:
2.预测野外车辆航向一般采用红外传感器功能,但在一些极端情况下,红外传感器就无法工作:(1)外界环境温度过高;(2)当在传感器与野外运动目标之间有障碍物时红外传感无法判别运动目标的方向;(3)红外对于远距离车辆的检测率较低。因此根据声音信号处理得到定向角来研究航向就显得至关重要:其不仅可以让复合式传感器在野外车辆行进中很好的预测运动目标的方向,而且还可以让各个传感器互相弥补,让复合式传感器在野外监测运动目标的精准度比单个传感器效果更加显著。
技术实现要素:
3.本发明提供一种基于动态数据实时适应的航向预测方法,能够对传感器实时产生的数据进行航向判别,主要针对地是野外车辆的航向判别。
4.本发明解决其技术问题所采用的技术方案是:提供一种基于动态数据实时适应的航向预测方法,包括以下步骤:
5.(1)对车辆行进过程中采集得到的声音信号进行处理,得到多个定向角数据;
6.(2)将得到的多个定向角数据通过坐标旋转的方式放在一个连续的区间内;
7.(3)将多个定向角数据作为训练集,训练线性回归模型,确定出定向角的变化趋势;
8.(4)根据所述定向角的变化趋势,判断野外运动车辆相对于传感器布设的运动方向,再结合传感器布设时声音传感器的朝向角预测出所述野外运动车辆行进的航向。
9.所述步骤(2)中的坐标旋转是指通过对定向角数据加或减同一个量级的数据实现恒等变换,使得野外运动车辆在运动过程中所形成的定向角连续。
10.所述步骤(2)和(3)之间还包括通过3σ法则对多个定向角数据中的异常值进行剔除的步骤。
11.所述通过3σ法则对多个定向角数据中的异常值进行剔除具体为:计算多个定向角数据的平均值u和标准偏差σ,将定向角数据中超过(u
‑
3σ,u+3σ)范围的数据作为异常值剔除。
12.所述步骤(3)中线性回归模型为y
t
=ax
t
+b,其中,x
t
表示t时刻自变量的值,y
t
表示t时刻因变量的值,a和b为一元线性回归方程的参数,其中,t时刻因变量的值,a和b为一元线性回归方程的参数,其中,n表示定向角数据的数量,x
i
表示i时刻的定向角数据,y
i
表示i时刻对应
的航向角数据。
13.所述步骤(4)具体为:若所述野外运动车辆相对于传感器布设的运动方向为从左向右行进时,即用声音传感器朝向角加上270度得到最终角度,若所述野外运动车辆相对于传感器布设的运动方向为从右向左行进时,即用声音传感器朝向角加上90度得到最终角度,最后将所述最终角度转为0到360之间合理的航向角,从而预测出野外运动车辆行进的航向。
14.有益效果
15.由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明主要对车辆行进过程中采集得到的声音信号进行处理得到定向角,然后对野外车辆目标的行进航向进行预测,预测方法为:首先对定向角旋转坐标使其连续,再对异常值检测处理,最后对其定向角线性回归,转换为相应的角度预测其走向趋势,最终决策表决判向。本发明模型简单,鲁棒性强,且对于数据集没有硬性要求,在少数数据集下也可得到运动目标的粗略航向,并且随着数据集的增加,得到更加精准的航向,符合传感器工作原理,即随着运动目标的行进,定向角数据增多,判别航向角越来越准确。
附图说明
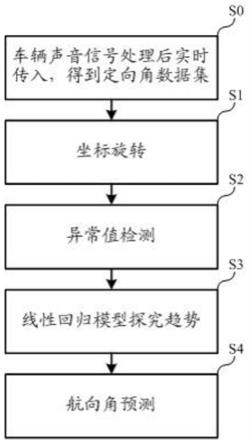
16.图1是本发明实施方式的基于动态数据实时适应的航向预测方法的流程图;
17.图2是不连续的定向角传入后通过坐标旋转将其数据处理在一个连续区间的图;
18.图3是有异常值的数据集,通过坐标旋转,去异常值,并分段的图。
具体实施方式
19.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
20.本发明的实施方式涉及一种基于动态数据实时适应的航向预测方法,如图1所示,包括以下步骤:
21.步骤s0,对车辆行进过程中采集得到的声音信号进行处理,得到多个定向角数据。
22.步骤s1,将得到的多个定向角数据通过坐标旋转的方式放在一个连续的区间内。具体地说,在野外车辆测试中,假设车辆针对一段直线运动,则定向角应该在某一个接近180度的区间内运动,因此应将所有的定向角转换为一个连续的区间内研究其趋势。若得到的定向角有从第一象限与第四象限的跳跃,则通过坐标旋转的方式放在一个连续的区间内。其中,坐标旋转即通过对定向角数据加或减同一个量级的数据实现恒等变换,使得野外运动车辆在运动过程中所形成的定向角连续而非存在跳跃点,从而便于研究其航向角。
23.如图2所示,小三角的点为定向角最初的数据。从图2中可看出,数据在中间断开,不连续。对于这样的数据,如果直接利用一元线性回归探究其趋势容易产生较大的误差,导致结果不准确,因此利用步骤s1使其定向角连续变为图中圆形的点。
24.步骤s2,通过3σ法则对多个定向角数据中的异常值进行剔除。在训练机器学习算法或应用统计技术时,错误值或异常值可能是一个严重的问题,它们通常会造成测量误差
或异常系统条件的结果,因此不具有描述底层系统的特征。实际上,最佳做法是在进行下一步分析之前,就应该进行异常值去除处理。目前,异常值检测一般常用到的方法有:数字异常值(numeric outlier)、z
‑
score、dbscan、3σ法则等。本实施方式采用3σ法则剔除异常值,具体为:计算多个定向角数据的平均值u和标准偏差σ,将定向角数据中超过(u
‑
3σ,u+3σ)范围的数据作为异常值剔除。
25.3σ法则为:数值分布在(u
‑
σ,u+σ)中的概率为0.6827,数值分布在(u
‑
2σ,u+2σ)中的概率为0.9545,数值分布在(u
‑
3σ,u+3σ)中的概率为0.9973。因此可以认为,y的取值几乎全部集中在(u
‑
3σ,u+3σ)区间内,超出这个范围的可能性仅占不到0.3%,因此,如果有任何数据点超过标准差的3倍,那么这些点很有可能是异常值或离群点,因此需要将超出范围的定向角数据作为异常值进行剔除。
26.如图3所示,应用本实施方式的方法可知:在定向角处于极小值点时,完成步骤s1d数据旋转后,根据本实施方式中步骤s2进行异常值剔除时,发现该点属于异常值点,则定向角数据被分割成两个部分,使其不连续;在两段中,选择数据较多而具有代表性的一段去研究其最终的判向。
27.步骤s3,将多个定向角数据作为训练集,训练线性回归模型,确定出定向角的变化趋势。结合图2与图3,从上面的分析中可以发现经过对定向角数据旋转坐标,异常值检测与处理后得到的数据,应用一元线性回归模型可以计算出定向角的变化趋势即单调性,从而对其拟合如图2和3中所示的直线那般,最后判断出运动车辆相对传感器的左右判向。本实施方式中采用的线性回归模型为y
t
=ax
t
+b,其中,x
t
表示t时刻自变量的值,y
t
表示t时刻因变量的值,a和b为一元线性回归方程的参数,其中,变量的值,a和b为一元线性回归方程的参数,其中,n表示定向角数据的数量,x
i
表示i时刻的定向角数据,y
i
表示i时刻对应的航向角数据。
28.步骤s4,根据所述定向角的变化趋势,判断野外运动车辆相对于传感器布设的运动方向,再结合传感器布设时声音传感器的朝向角预测出所述野外运动车辆行进的航向。具体为:若所述野外运动车辆相对于传感器布设的运动方向为从左向右行进时,即用声音传感器朝向角加上270度得到最终角度,若所述野外运动车辆相对于传感器布设的运动方向为从右向左行进时,即用声音传感器朝向角加上90度得到最终角度,最后将所述最终角度转为0到360之间合理的航向角,从而预测出野外运动车辆行进的航向。
29.本实施方式可以针对处于野外环境中的车辆,在复合式传感器中,单单依靠红外传感器判向,则在温度过高以及布设传感器前面有障碍物(如布设路前有草丛)的情况下,红外判向不准,所以研究声音信号的定向角与航向之间的关系,可以在很大程度上提升判向的准确率。
30.为验证本实施方式有效性,共采集硬土路、水泥路两种不同路面的车辆声音信号处理后的定向角作为样本。车辆类型分为履带车、轮式装甲车和轻型轮式车三种类型,对于所有的数据应用本实施方式中的方法与用红外传感器判向进行实验。结果表明,本实施方式的方法可以很好的应用在复合式传感器中。
31.对比实验1:
32.表1方法对比结果表
33.方法准确率动态数据预测航向(本实施方式)90.2%红外传感器判向75.4%
34.对比实验1结果显示,针对野外车辆运动而言,用红外传感器判向没有本实施方式的方法准确率高,从而本实施方式的方法对于预测航向起到重要的作用。
35.对比实验2:动态数据预测航向方法对于不同地区实验结果显示为:
36.表2不同地区实验结果表
37.地区准确率上海崇明91.2%江苏常州90.0%河北张家口86.0%
38.实验分析:上表中,上海崇明准确率较高,因为上海崇明数据量比较大,更加可以代表本实施方式的方法的实际效果,在江苏常州以及河北张家口实验数量集较少,但是也可以说明,本实施方式的方法对于不同地区的野外测试,效果都很显著。
39.不难发现,本发明主要对车辆行进过程中采集得到的声音信号进行处理得到定向角,然后对野外车辆目标的行进航向进行预测,预测方法为:首先对定向角旋转坐标使其连续,再对异常值检测处理,最后对其定向角线性回归,转换为相应的角度预测其走向趋势,最终决策表决判向。本发明模型简单,鲁棒性强,且对于数据集没有硬性要求,在少数数据集下也可得到运动目标的粗略航向,并且随着数据集的增加,得到更加精准的航向,符合传感器工作原理,即随着运动目标的行进,定向角数据增多,判别航向角越来越准确。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1