一种带电作业人员安全距离监测方法及系统与流程
1.本发明属于电网安全监测领域,具体涉及一种带电作业人员安全距离监测 方法及系统。
背景技术:
2.现在的电网已经日趋复杂和广泛,在电网的工作过程中,需要进行检查或 维修。带电作业是保障电网安全稳定运行的重要技术手段,同时也是一项高空 高危的特殊工种。传统的带电作业和设备在实际应用中存在着如下问题,包括: 安全防护技术手段不足;智能装置、远程管控装置缺乏;人员劳动强度大等问 题。因此,现有技术无法满足当前带电检修安全防护智能化、信息化、可视化 和互动化的实际要求;受带电作业复杂现场环境和强电磁场因素的影像,现有 的基于现场作业过程中,实时信息化和智能化的安全监测预警、现场作业管控 和远程增段指挥的主动安全防护技术手段,还未能充分支撑带电作业安全保障 工作。例如在高空带电环境下,对作业人员的安全距离无有效监测手段,现阶 段只能依靠经验判断,难以精准把控安全距离,存在极大的安全风险。
技术实现要素:
3.本发明的目的之一在于提供一种带电作业人员安全距离监测方法,该方法 通过对人体姿态实时建模,对带电作业人员的安全距离实时监测;本发明的目 的之二在于提供一种基于带电作业人员安全距离监测方法的系统,保障了带电 作业人员的安全。
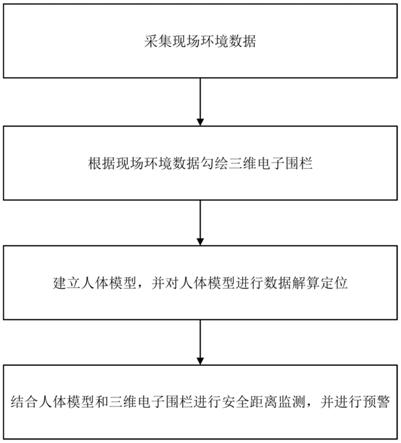
4.本发明提供的这种带电作业人员安全距离监测方法,包括如下步骤:
5.s1.采集现场环境数据;
6.s2.根据现场环境数据勾绘三维电子围栏;
7.s3.建立人体模型,并对人体模型进行数据解算定位;
8.s4.结合人体模型和三维电子围栏进行安全距离监测,并进行预警。
9.所述的步骤s1,包括对现场环境进行点云数据采集,获取现场环境的三维 模型和位置数据;对于获得的线路本体、通道和重要跨越物的三维矢量线模型, 通过基于属性的线转体技术、模型库调取技术及高精度纹理生成技术,建立输 电线走廊杆塔组件及交跨物的三维模型。
10.所述的步骤s2具体为,将现场环境的三维模型导入为底图,采用绘制工具 在现场环境的三维模型上勾绘三维电子围栏。
11.所述的步骤s3,对人体模型定位的方法包括如下步骤:
12.a1.对人体重要部位的位置信息实时与三维电子围栏的位置信息进行解 算,判断定位的过程中是否存在固定解;
13.a2.若存在一个固定解,判断固定解所在的部位;
14.a3.若存在一个以上固定解,判断头部天线的解算状态。
15.所述的步骤a1,具体包括若存在固定解,则判断存在固定解的个数;若不 存在固
定解,此时头部的点为浮点解,则以头部的定位点为起点,向下预设距 离后得到的点为球心,绘制球体,并设置预设半径。
16.所述的步骤a2,具体包括如下步骤:
17.b1.当头部天线的解算状态为固定解时,以头部天线的定位点为起点,向下 预设距离后的点为球心,绘制球体,并设置预设半径;
18.b2.当脚部的天线存在固定解,则以脚部天线的定位点为起点,向上预设距 离后得到的点为球心,绘制球体,并设置预设半径;
19.b3.当手部的天线存在固定解,则以手部天线的定位点为球心绘制球,并设 置预设半径。
20.所述的步骤a3,具体包括如下步骤:
21.c1.当头部天线解算状态为固定解:
22.以头部天线的定位点为起点,向下预设距离后得到的点为球心,绘制一个 球体,球体的半径为球心到最远的定位点的距离l;若距离l超过预设半径, 则取预设半径作为球体半径;
23.c2.当头部天线解算状态不固定时,按照多固定解定位方法绘制球体。
24.所述的多固定解定位方法包括如下步骤:
25.d1.若两个固定解是脚部,则以两个脚部天线定位点中心为起点,向上预 设距离后得到的点为球心,绘制一个球体,球体的半径为球心到最远的定位点 的距离l;若距离l超过预设半径,则取预设半径作为球体半径;
26.d2.若两个固定解是手部,则以两个手部天线定位点中点为球心绘制球体, 球体的半径为球心到最远的定位点的距离l;若距离l超过预设半径,则取预 设半径作为球体半径;
27.d3.若同时存在两个脚部天线定位点和两个手部天线定位点为固定点,采 用步骤d1绘制球体;
28.d4.若不存在头部、两个固定解为脚部或两个固定解为手部,则以所有定 位点的中点做球心,绘制球体,并设置预设半径。
29.本发明还公开了一种基于上述带电作业人员安全监测方法的系统,包括安 全距离监测装置、cors站差分数据解算装置和用户应用装置;安全距离监测装 置采用带电作业人员安全距离监测方法,用于对带电作业人员的安全距离实时 监测;cors站差分数据解算装置用于收集定位数据并传送到安全距离监测装置 中;cors站差分数据解算装置包括基准站网、数据处理中心、数据传输模块和 数据播发模块;数据处理中心通过数据传输模块连接基准站网和用户应用装置, 数据播发模块分别连接安全距离监测装置和数据处理中心;基准站网包括均匀 分布的基准站,基准站网用于采集卫星观测数据并输送到数据处理中心;数据 处理中心用于接收基准站网的数据,并进行数据处理,形成多基准站差分定位 用户数据,并分发给用户;数据传输模块包括数据传输硬件设备和软件控制模 块;数据播发模块连接数据处理中心,并播发导航和定位数据;用户应用装置 用于接收数据并进行实时监控。
30.基准站网还包括抗干扰装置,抗干扰装置连接数据处理中心;抗干扰装置 采用大接收角度的螺旋天线;同时大接收角度的螺旋天线采用高介电性构造材 料;大接收角度的
螺旋天线采用巴伦电路平衡设计。
31.本发明提供的这种带电作业人员安全距离监测方法及系统,能够在高空带 电的情况下,对作业人员的安全距离进行有效监测;对带电检修的过程进行预 警,提高了作业人员的安全性,同时监测高效,节省人力资源和成本。
附图说明
32.图1为本发明方法的流程示意图。
33.图2为本发明方法的身体部位位置示意图。
34.图3为本发明系统的结构示意图。
35.图4为本发明实施例的cors站差分数据推送示意图。
36.图5为本发明实施例的cors系统工作流程示意图。
37.图6为本发明实施例的实际电塔环境示意图。
38.图7a为本发明实施例的网络远离电磁场环境解状态示意图,图7b为本发 明实施例的网络强电磁场环境解状态示意图,图7c为本发明实施例的网络远离 电磁场环境差分延时示意图,图7d为本发明实施例的网络强电磁场环境差分延 时示意图。
39.图8a为本发明实施例的卫星远离电磁场场定位精度符合示意图,图8b为 本发明实施例的卫星强电磁场场定位精度内符合示意图。
40.图9a为本发明实施例的rtk远离电磁场解状态示意图,图9b为本发明实 施例的rtk强电磁场解状态示意图。
41.图10为本发明实施例的三维电子围栏示意图。
具体实施方式
42.如图1为本发明方法的流程示意图:本发明提供的这种带电作业人员安全 距离监测方法,包括如下步骤:
43.s1.采集现场环境数据;
44.步骤s1包括对现场环境进行点云数据采集,获取现场环境的三维模型和位 置数据;在本实施例中通过无人机搭载激光雷达点云数据采集系统,并采用多 镜头倾斜摄影传感器,对现场环境中的杆塔和线路进行采集;对于自动/半自动 获得的线路本体、通道和重要跨越物等的三维矢量线模型,可通过基于属性的 线转体技术、模型库调取技术及高精度纹理生成技术,建立输电线走廊杆塔各 组件(塔、绝缘子、导地线、间隔棒等)、重要交跨物等的高精度三维模型。
45.s2.根据现场环境数据勾绘三维电子围栏;
46.步骤s2具体为,将现场环境的三维模型导入为底图,采用绘制工具在现场 环境的三维模型上勾绘三维电子围栏;三维电子围栏是虚拟的,但具备精准的 高程地理位置信息。
47.s3.对人体模型进行定位;
48.如图2为本发明方法的身体部位位置示意图;对人体模型定位的方法如下:
49.a1.三维电子围栏在检修作业管控装置进行实时解算,在带电作业人员工 作时,人体重要部位的位置信息能够实时与三维电子围栏的位置信息进行解算, 判定作业人员
是否处于安全区域内。判断定位的过程中是否存在固定解;若存 在固定解,则判断存在固定解的个数;若不存在固定解,此时头部的点为浮点 解,则以头部的定位点为起点,沿重力方向向下0.6m后得到的点为球心,绘制 球体,具体包括:
50.o(x,y,z)=t(x1,y1,z1‑
0.6),r=1
51.其中,o(x,y,z)表示球心坐标;t(x1,y1,z1‑
0.6)表示头部天线的定位点坐 标向下0.6m;r表示半径;
52.a2.若存在一个固定解,判断固定解的部位:
53.b1.当头部天线的解算状态为固定解时,以头部天线的定位点为起点,沿重 力方向向下0.6m之后得到的点为球心,绘制一个半径为1m的球,具体包括:
54.o(x,y,z)=t(x1,y1,z1‑
0.6),r=1
55.其中,o(x,y,z)表示球心坐标;t(x1,y1,z1‑
0.6)表示头部天线的定位点坐 标向下0.6m;r表示半径;
56.b2.当脚部的天线存在固定解,则以脚部天线的定位点沿重力方向向上 0.6m为球心绘制一个半径为1m的球,具体包括:
57.o(x,y,z)=j(x2,y2,z2+0.6),r=1
58.其中,o(x,y,z)表示球心坐标;j(x2,y2,z2+0.6)表示脚部天线的定位点坐 标向上0.6m;r表示半径;
59.b3.当手部的天线存在固定解,则以手部天线的定位点为球心,做一个半径 为1m的球,具体包括:
60.o(x,y,z)=s(x3,y3,z3),r=1
61.其中,o(x,y,z)表示球心坐标;s(x3,y3,z3)表示手部天线的定位点坐标;r 表示半径。
62.a3.若存在一个以上固定解,判断头部天线的解算状态:
63.c1.当头部天线解算状态为固定解:
64.以头部天线的定位点为起点,沿重力方向向下0.6m后得到的点为球心,绘 制一个球体,球体的半径为球心到最远的定位点的距离l;若距离l超过1m, 则取1m作为球体半径,具体包括:
65.o(x,y,z)=t(x1,y1,z1‑
0.6),
66.其中,o(x,y,z)表示球心坐标;t(x1,y1,z1‑
0.6)表示头部天线的定位点坐 标向下0.6m;r表示半径;
67.c2.当头部天线解算状态不固定时:
68.若两个固定解都是脚部,则以两个脚部天线定位点中心为起点,沿着重力 的方向向上0.6m后的点为球心,绘制球体,球体的半径为球心到最远的定位点 的距离l;若距离l超过1m,则取1m作为球体半径,具体包括:
69.o(x,y,z)=[(x
rj
+x
lj
)/2,(y
rj
+y
lj
)/2,(z
rj
+z
lj
)/2+0.6],
[0070]
其中,o(x,y,z)表示球心坐标;(x
rj
,y
rj
,z
rj
)表示右脚天线定位点的坐标; (x
lj
,
y
lj
,z
lj
)表示左脚天线定位点的坐标;r表示半径;
[0071]
若两个定位点是手部,则以两个手部天线定位点中点为球心绘制球体,球 体的半径为球心到最远的定位点的距离l;若距离l超过1m,则取1m作为球 体半径,具体包括:
[0072]
o(x,y,z)=[(x
rs
+x
ls
)/2,(y
rs
+y
ls
)/2,(z
rs
+z
ls
)/2],
[0073]
其中,o(x,y,z)表示球心坐标;(x
rs
,y
rs
,z
rs
)表示右脚天线定位点的坐标; (x
ls
,y
ls
,z
ls
)表示左脚天线定位点的坐标;r表示半径;
[0074]
若同时存在两个脚部天线定位点和两个手部天线定位点为固定点,采用脚 部天线定位点;
[0075]
若不存在头部、两个固定解为脚部或两个固定解为手部,则以所有定位点 的中点做球心,绘制球体,并设置预设半径为1m。
[0076]
s4.结合人体模型和三维电子围栏进行安全距离监测,并进行预警。
[0077]
如图3为本发明系统的结构示意图。本发明还公开了基于所述的一种带电 作业人员安全距离监测方法的系统,该系统包括安全距离监测装置、cors站差 分数据解算装置和用户应用装置;安全距离监测装置包括带电作业人员安全距 离监测方法,用于对带电作业人员的安全距离实时监测;cors站差分数据解算 装置用于收集定位数据并传送到安全距离监测装置中。cors站差分数据解算装 置包括基准站网、数据处理中心、数据传输模块和数据播发模块;数据处理中 心通过数据传输模块连接基准站网和用户应用装置,数据播发模块分别连接安 全距离监测装置和数据处理中心;基准站网包括均匀分布的基准站,基准站网 用于采集卫星观测数据并输送到数据处理中心;数据处理中心用于接收基准站 网的数据,形成多基准站差分定位用户数据,并分发给用户;数据传输模块包 括数据传输硬件设备和软件控制模块,在本实施例中数据传输硬件设备采用光 纤专线,用于发送基准站网数据;数据播发模块连接数据处理中心,并通过uhf 电台和互联网等播发导航和定位数据,互联网包括移动网络和宽带网络等;用 户应用装置包括用户信息接收系统、网络型rtk定位系统、事后和快速精密定 位系统、自主式导航系统和监控定位系统。
[0078]
基准站网包括抗干扰装置,抗干扰装置连接数据处理中心并保持信号稳定; 抗干扰装置采用大接收角度的螺旋天线,大接收角度的螺旋天线的搜星能力更 强,常用于对定位精度要求较高或环境复杂、严苛的场景中,大接收角度的螺 旋天线具有较强的极化率;同时大接收角度的螺旋天线采用高介电性构造材料 制造,使得大接收角度的螺旋天线的近场范围很小,不易失调;大接收角度的 螺旋天线采用巴伦电路平衡设计,能够有效隔离外界电磁噪音信号的影响,达 到抗强电场干扰的目的。
[0079]
如图4为本发明实施例的cors站差分数据推送示意图。在本实施例中, cors站差分数据解算装置为了达到高精度的预期目标,配置可以接收cors 站差分数据及进行联合解算高精度位置信息的模块;在cors站的选择中包括:
[0080]
通过社会cors基站获取差分数据,通过安全距离监测装置的4g公网卡获 取其推送的cors数据。通过湖南省国网预计在2020年建成的,覆盖全省的内 部cors站获取差分数据,此种方式在安全距离监测装置中配备专网卡。同时, 安全距离监测装置与后续的检修和后台数据的交互不能采用不同的4g网络,会 导致通信受阻,因此,安全预警监测装置的
4g模块仅用于获取差分数据,安全 预警监测装置与检修作业管控装置的数据交互采用电台的方式进行,对后续的 检修和后台数据的交互不会产生影响。
[0081]
如图5为本发明实施例的cors系统工作流程示意图。cors系统基于全 球卫星导航定位技术,在一个地区,根据需求按照一定的距离建立gnss参考 站,利用计算机、数据通信和互联网技术将各个参考站和数据中心组成网络, 实时将gnss参考站数据传输到数据中心,利用数据处理软件进行处理,向用 户自动发布不同类型的gnss原始数据和各种类型的rtk改正数据等。用户只 需一台接收机,即可进行准实时、实时快速定位,以及事后定位或导航定位。
[0082]
网络型rtk定位系统采用rtk技术,rtk技术形成于20世纪90年代,主 要分为常规rtk技术和网络rtk技术。常规rtk技术在流动站与参考站距离 小于30km时,精度可达cm级;距离大于30km时,测量精度衰减很快,通常只能达 到dm级。网络ritk是由参考站网、数据中心、数据通信链路和流动站组成。 基准站配备双频全波长gnss接收机,参考站坐标精确已知并按照规定的采样 率进行连续观测,通过数据通信链路传回数据中心;数据中心根据流动站发送的 近似坐标计算误差改正信息,然后将改正信息播发给流动站。网络rtk技术的优 势在于用户不用建立基准站,且用户与基准站距离可以扩大到上百公里,同时 减少了误差源,使改正信息的可靠性和精度大幅改善。
[0083]
定位系统采用北斗高精度定位终端,开阔环境下可达到厘米级定位精度。 造型小巧,接收卫星信号能力强,配有螺旋天线,能在一定程度上抗电磁干扰, 可作为设计中的背部主终端使用。在后续的研制过程中需进行多个定位主板及 供电系统的集成。
[0084]
为验证装置在高电场强磁场环境下的通信能力,以及卫星信号的强度及误 差情况,以及网络延迟情况,在实际电塔环境下,进行了对应测试。测试结果 如下:
[0085]
如图6为本发明实施例的实际电塔环境示意图。本实施例采用湖南株洲 500kv古星i线71号塔现场环境,验证在高压强电场下4g信号、蓝牙信号、 电台信号和卫星信号的传输和接收情况。
[0086]
(1)蓝牙分析;表1表示本发明实施例的蓝牙远离电磁场环境下采点连续 性示意图,表2表示本发明实施例的蓝牙强电磁场环境下采点连续性,说明蓝 牙采点不受时间影响;采点记录数据的频率一直为1s/次,与手簿设定的采点频 率相符。可见在远离电磁场、强电磁场环境中,设备与手簿的蓝牙连接都未断 开,即强电磁场不会干扰蓝牙信号传输。
[0087]
(2)4g网络信号分析;如图7a为本发明实施例的网络远离电磁场环境解 状态示意图,如图7b为本发明实施例的网络强电磁场环境解状态示意图,如图 7c为本发明实施例的网络远离电磁场环境差分延时示意图,如图7d为本发明实 施例的网络强电磁场环境差分延时示意图。
[0088]
分析远离电磁场环境和强电磁场环境下设备的解状态:图7a和图7b中的 纵轴10表示固定解、8表示浮点解、6表示差分解;图7a和图7b中的横轴分 别表示点的编号,系列1表示解状态的变化曲线;从图7a和图7b中可见两种 环境下解状态基本稳定在固定解,强电磁场环境下由于设备在电塔上受风力影 响,导致极少点出现其中出现差分解。总体解状态都非常好。
[0089]
分析远离电磁场环境和强电磁场环境下设备差分延时:图7c和图7d中的 纵轴1表示差分效果最好,定位延时最低;图7c纵轴表示差分延时,单位为s, 横轴表示点的编号,系
列1表示设备远离电磁场环境下差分延时变化曲线;图 7d纵轴同样表示差分延时,单位为s,横轴表示点的编号,系列1表示设备在强 电磁场环境下差分延时变化曲线;从图7c和图7d中可见两种环境下差分延时 除了存在几处点延时稍高,其他点差分延时都正常。
[0090]
因此,强电磁场环境不影响设备的4g网络信号传输。
[0091]
表1
[0092][0093]
表2
[0094][0095]
(3)卫星信号分析:如图8a为本发明实施例的卫星远离电磁场场定位精 度符合示意图,如图8b为本发明实施例的卫星强电磁场场定位精度内符合示意 图。图8a和图8b中的纵轴均表示定位精度,单位为m,图8a和8b中的横轴分 别表示点的编号。图8a显示在正常远离电磁场空旷环境下定位精度在5cm左右; 图8b显示在强电磁场环境下定位浮动较大,原因为设备通过绳索吊至电塔上, 无法保持稳固状态,测试现场受到风力影响,设备处于持续晃动状态,在这一 条件下,定位精度还能保持在在20cm左右。
[0096]
(4)rtk电台信号分析:如图9a为本发明实施例的rtk远离电磁场解状 态示意图,如图9b为本发明实施例的rtk强电磁场解状态示意图。图9a和图 9b的纵轴均表示设备的解状态,10表示固定解,8表示浮点解;图9a和图9b 中的横轴均表示点的编号。从图9a和图9b中的两种环境下设备的解状态,可 见电台数据传输铰链较为稳定,地面移动站可以实时接收强电场下基准站通过 电台传输的数据。
[0097]
在本实施例中,步骤s2中的三维电子围栏采用如下方式建立:在三维激光 技术对输电线路数据采集的基础上,完成输电线路及杆塔三维立体建模与校准; 电子围栏无需在现场安装硬件设备,管理人员可直接在系统后台或者通过检修 作业管控装置按需在输电线路及杆塔绘制虚拟空间电子围栏。平台支持规则形 状的三维模型建立,支持手动绘制规则形状的围栏,可满足常规情况下三维电 子围栏的使用需求。系统后台已加入出入围栏告警,在立体空间内的触发行为, 均能实现警报,以平台端同步高亮显示的方式进行提示。
[0098]
如图10为本发明实施例的三维电子围栏示意图。按需求绘制不规则三维电 子空间围栏。三维电子围栏为可编辑式围栏,通过实时拖动围栏点改变围栏形 状,通过实时判
定点的位置,得出点对多面体的位置判定。三维电子围栏即在 三维地图上绘制一块虚拟地理边界,并配置好报警规则,若监控对象触发了报 警规则(走出或走进地理围栏),平台与移动端均会收到相应的报警通知,达到 监控人员、车辆安全的效果。该功能可广泛应用于工地作业、铁路巡检、电网 巡检、交通巡检等行业应用中。平台提供了多面体、柱状体、球体等多种围栏 模板,帮助用户在场景中自定义电子围栏范围。可广泛应用于工地作业、铁路 巡检、电网巡检、交通预警等领域。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1