基于CNN分类和RNN预测的管道内检测器定位方法与流程
基于cnn分类和rnn预测的管道内检测器定位方法
技术领域
1.本发明涉及一种管道内检测器定位方法,特别涉及一种基于cnn分类和rnn预测的管道内检测器定位方法。
背景技术:
2.目前,随着世界经济的飞速发展,石油资源逐渐成为当今世界最重要的能源和化工原料。这种现实情况迫使石油的运输成了当下热议的话题。目前,石油资源的运输主要包括四种方式:铁路运输、公路运输、水运以及管道运输。其中石油的管道运输在国民经济和国防建设领域中发挥着越来越大的作用。随着我国管道总里程的迅速增长,管道腐蚀、人工破坏和老化开裂的现象频频发生,造成巨大的经济损失的同时,也对环境造成严重的污染。目前应用最广泛的检测方法是使用管道内检测器进行管道巡检的漏磁检测方法,而内检测器管外定位技术又是管道检测系统中极为重要的组成部分。
3.不同的管道内检测器定位方法有不同的优缺点和适用范围。通过对比和分析多种国内外基于不同原理进行管道内检测器定位的技术,可以发现虽然这些技术都能够实现内检测的定位,但它们在实际应用中都具有一定的局限性。目前,我国油气管道运输发展速度迅猛,已经成了初具规模的跨区域油气管网。然而,在管道里程快速增长的同时,许多旧管道在经历了几十年的油气运输后进入事故多发期,同时人为偷盗对管道的破坏和管道腐蚀等原因使得管道泄漏和燃爆事故频发,给人民生命财产造成巨大损失的同时,也给陆地和海洋生态环境造成严重破坏。因此,准确定位管道中的内检测器对于石油资源的安全运输就显得尤为重要。
4.目前国内许多管道工程现场安装的内检测器定位装置中,除机械撞针式设备外,大多是基于永磁体的方法判断内检测器位置,对于清管器以及未安装永磁体的变形内检测器是无法适用的。而基于振动信号对内检测器定位的技术,是利用内检测器皮碗与管壁的摩擦来跟踪内检测的运行。当内检测器运动到采集点处正下方时,采集点得到的摩擦振动信号达到最大,此时最大的振动信号点对应的时刻就是内检测通过标记点的时刻,实现内检测器的标记定位。因此,基于振动信号的内检测器定位技术不需要对内检测器预先装置发射源设备,对是否装备永磁体的内检测器都适用,无论是清管器还是通径仪都可以实现跟踪定位。但是在一些自动化程度较高的工程现场,即使安装了基于振动信号定位的系统,也只是在背景干扰较少的中间管段使用。这是因为随着石油管道工业的发展,管道首末站人工操作较多,如工人操作阀门、工人开阀卸油以及启泵增压都会对管道振动信号产生工况干扰而影响定位系统的精准度。同时,管道首末站处一般靠近工厂或公路,周围产生的地面振动又会非常强烈。目前虽然有一些管道工程应用了基于振动信号的定位技术,但均应该于背景干扰较少的中间管段。在复杂环境背景以及多变的管道工况下,由于其算法不能区分振动信号的振源,容易对内检测器是否真实通过标记点而产生误判。由上所述,可见,在复杂环境背景以及多变的管道工况下识别振动信号的振源,从而提高内检测器定位系统的精准度以及指向性能,是当前管道内检测器定位领域亟需解决的难题之一。
技术实现要素:
5.本发明为解决公知技术中存在的技术问题而提供一种基于cnn分类和rnn预测的管道内检测器定位方法。
6.本发明为解决公知技术中存在的技术问题所采取的技术方案是:
7.一种基于cnn分类和rnn预测的管道内检测器定位方法,对原始管道振动信号样本进行归一化和分类截取预处理,得到预处理样本集,然后对预处理样本集进行降噪处理及特征提取,得到训练样本集;建立cnn模型,用于对管道振动信号进行分类识别;建立rnn模型,用于对已分类识别的管道振动信号进行管道内检测器的位置预测;采用训练样本集对cnn模型进行训练,由完成训练的cnn模型对训练样本集进行分类识别,得到已分类识别的训练样本集;采用已分类识别的训练样本集对rnn模型进行训练;将实时采集的管道振动信号,依次经过均已完成训练的cnn模型和rnn模型处理,得到管道内检测器的定位数据。
8.进一步地,该方法包括如下步骤:
9.步骤1,提取管道信号的原始数据作为原始数据样本集,对原始数据样本集进行归一化及校正处理;依据工况类别对处理后的原始数据样本集进行分类截取,得到样本集a;
10.步骤2,用小波包分解-软阈值的方法对样本集a进行降噪处理,得到样本集a1;对样本集a进行时频域特征提取,得到信号特征样本集a2;对样本集a进行能量谱特征提取得到信号能量谱特征样本集a3;
11.步骤3,构建cnn模型对样本集进行分类识别,将a1、a2、a3作为cnn模型的输入;
12.步骤4,构建rnn模型预测管道内检测器过球时刻,将cnn模型的输出作为rnn模型的输入;
13.步骤5,从样本集a1、a2、a3中各对应选取一部分作为训练样本集,将其余的部分作为测试样本集;用训练样本集训练cnn模型及rnn模型;用测试样本集测试cnn模型及rnn模型;
14.步骤6,按照步骤2中处理样本集a的方法,对实时采集的管道振动信号进行处理;将处理后的数据依次经过训练完成的cnn模型及rnn模型,得到管道内检测器过球时刻。
15.进一步地,步骤1中,采用滑动且叠加的时间窗,对管道振动信号进行数据提取;采用z-score标准化的方法,对数据样本集进行归一化;用中值校正方法对数据样本集进行校正处理。
16.进一步地,步骤2中,设样本集a=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];其中i为工况类别;x
ig
为第i类数据样本集的第g个数据;m为样本数量;用小波包分解-软阈值的方法进行降噪处理;得到t
×
t的小波包模均值矩阵用markov方法进行特征提取;得到t
×
t的矩阵用markov方法提取能量谱特征,得到t
×
t的系数时频图其中t
×
t=m。
[0017]
进一步地,用小波包分解-软阈值的方法对样本集a进行降噪处理的具体方法如
下:对信号进行基于db7的3层小波包分解;并对小波包分解系数进行逆小波重构。
[0018]
进一步地,步骤2包括如下分步骤:
[0019]
步骤a1,markov链上下边界的选取:b、a分别表示窗体的上边界、下边界;其中表示该数据段的均值,x
max
、x
min
分别表示该数据段的最大值、最小值;这里取窗体的边界比例系数λ=0.01;
[0020]
步骤a2,将状态数划分为5个,设初始状态的步长step1=q
1-a;设中间状态的步长step2=q
i+1-qi{i=1,2,3};设终止状态的步长为step3=b-q4;其中q1为该数据段的1/5分位数,q4为该数据段的4/5分位数;
[0021]
步骤a3,构造markov链:将漏磁信号进行x(i)到s(i)的转换;当x(i)∈(a,a+step1]时,s(i)=1;当x(i)∈(qi,qi+step2]时,s(i)=i+1{i=1,2,3};当x(i)∈(q4,q4+step3],s(i)=5;
[0022]
步骤a4,提取markov特征:其中为状态上移次数,为状态下移次数,ki为状态保持次数,s(j)为j时刻的状态,s(j+1)为j+1时刻的状态,l表示窗体内数据段的长度;将通过上步方法得到的各个状态的转移次数矩阵转换为一维行向量通过得到状态转移概率矩阵;其中k为对应状态转移次数矩阵,k
[i][j]
为状态i向状态j的转移次数。
[0023]
进一步地,步骤3中,cnn模型基于vgg16模型构建。
[0024]
进一步地,步骤3包括如下分步骤:
[0025]
步骤b1,将样本集a1、a2、a3数据输入到卷积层时,卷积层中的卷积核对输入至该层的特征按照卷积核大小和步长做卷积运算;l
out
为当前卷积层的输入尺寸,l
in
为当前层输入尺寸,k为当前卷积层的卷积核尺寸,s为前层的卷积步长;卷积核对当前层的输入进行卷积运算的数学公式为前层的输入进行卷积运算的数学公式为为当前卷积层输入,k
ij
为当前卷积层的权重矩阵,bj为当前卷积层的偏置项向量,f
cov
()为卷积运算,x
jout
为当前卷积层运算后的输出;
[0026]
步骤b2,数据样本集从卷积层到池化层中,池化层对数据进行降采样处理;选择relu激活函数f
relu
(x)=max(0,x)作为非线性激活函数,连接卷积层和全连接层;
为全连接层的输入,为全连接层输出,w
ij
为全连接层输入与输出之间的权重矩阵,bj为偏置项向量,f
fc
()为激活函数;
[0027]
步骤b3,用损失函数l(p,y)=-∑y
n log(pn),n∈[1,n]来计算估计输出和真实标签的差异,y为真实标签输出,p为所有输出类别的概率,n为输出层神经元个数;用softmax函数计算每个类的概率,为网络中前一次的非归一化输出结果;在使用交叉熵损失函数kl(p||y)=l(p,y)-h(p)来优化卷积神经网络参数,kl(p||y)为最小化预测输出p和真实标签y之间的kl散度,l(p,y)、h(p)分别为最小化预测输出p和真实标签y的交叉熵l和熵h。
[0028]
进一步地,建立基于bi-lstm的rnn模型;采用dropout模型和bn模型优化rnn模型的网络参数。
[0029]
本发明具有的优点和积极效果是:
[0030]
第一,本发明基于cnn模型进行信号分类识别,使信号分类过程不仅对输入进行局部特征提取,而且还能将各节点局部信息整合后得到全局特征。再结合卷积核权值进行共享,从而减少网络参数训练量和减少网络的过拟合程度;
[0031]
第二,本发明基于rnn模型进行过球时刻精准辨识和回归预测,使管道振动信号在bi-lstm网络中可以从前往后也可以从后往前传播,能够使每一刻管道的振动信号都可以与前后时刻的信号数据建立起联系,达到了减少网络参数训练量的目的,同时也能够更加充分地利用管道振动信号特征。
[0032]
第三,本发明将cnn模型的分类识别和rnn模型的过球时刻精准辨识网络相结合,综合考虑了各类工况实测样本,形成的管道内检测器定位方法能够准确识别复杂环境背景以及多变的管道工况下振动信号的振源,从而提高内检测器定位系统的精准度以及指向性能。
附图说明
[0033]
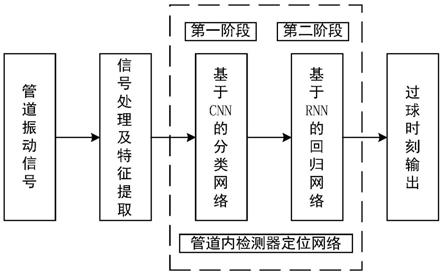
图1为本发明的基于cnn分类和rnn预测的管道内检测器定位方法的流程图。
[0034]
图2为本发明的cnn模型的基本结构图。
[0035]
图3为本发明的cnn模型结构图。
[0036]
图4为本发明的一种cnn模型工作流程图。
[0037]
图5为本发明的一种cnn模型和传统cnn模型关于管道振动信号准确率的对比曲线图。
[0038]
图6为本发明的一种cnn模型和传统cnn模型对于管道振动信号损失误差对比曲线图。
[0039]
图7为本发明一种rnn模型基本结构图。
[0040]
图8为本发明的一种基于bi-lstm的rnn模型结构图。
[0041]
图9为本发明的一种rnn模型工作流程图。
具体实施方式
[0042]
为能进一步了解本发明的发明内容、特点及功效,兹列举以下实施例,并配合附图详细说明如下:
[0043]
本发明中的英文单词及缩写中文注释如下:
[0044]
cnn:卷积神经网络(convolutional neural networks,cnn)是根据视觉细胞研究启发而创立的一类包含卷积计算且具有深度结构的前馈神经网络。
[0045]
rnn:循环神经网络(recurrent neural network,rnn)是一类以序列数据为输入,在序列的演进方向进行递归且所有节点按链式连接的递归神经网络;能对过去的数据产生记忆状态,将数据在时间维度上建立联系。
[0046]
epoch:当一个完整的数据集通过了神经网络一次并且返回了一次,这个过程称为一个epoch。
[0047]
accuracy:准确率。
[0048]
bi-lstm:双向长短期记忆网络(bidirectional long short-term memory networks,bi-lstm)在长短期记忆网络(long short-term memory networks,lstm)的基础上,结合了输入序列在前向和后向两个方向上的信息。
[0049]
markov:markov链是一组具有马尔可夫性质的离散随机变量的集合,其同时还具有不可约性、常返性、遍历性和周期性。
[0050]
dropout:是指在深度学习网络的训练过程中,对于神经网络单元,按照一定的概率将其暂时从网络中丢弃。
[0051]
bn:一种有效的局部响应训练优化方法。
[0052]
请参见图1至图9,一种基于cnn分类和rnn预测的管道内检测器定位方法,对原始管道振动信号样本进行归一化和分类截取预处理,得到预处理样本集,然后对预处理样本集进行降噪处理及特征提取,得到训练样本集;建立cnn模型,用于对管道振动信号进行分类识别;建立rnn模型,用于对已分类识别的管道振动信号进行管道内检测器的位置预测;采用训练样本集对cnn模型进行训练,由完成训练的cnn模型对训练样本集进行分类识别,得到已分类识别的训练样本集;采用已分类识别的训练样本集对rnn模型进行训练;将实时采集的管道振动信号,依次经过均已完成训练的cnn模型和rnn模型处理,得到管道内检测器的定位数据。
[0053]
进一步地,该方法可包括如下步骤:
[0054]
步骤1,可提取管道信号的原始数据作为原始数据样本集,可对原始数据样本集进行归一化及校正处理;可依据工况类别对处理后的原始数据样本集进行分类截取,得到样本集a;
[0055]
步骤2,可用小波包分解-软阈值的方法对样本集a进行降噪处理,得到样本集a1;可对样本集a进行时频域特征提取,得到信号特征样本集a2;可对样本集a进行能量谱特征提取得到信号能量谱特征样本集a3。
[0056]
步骤3,可构建cnn模型对样本集进行分类识别,将a1、a2、a3作为cnn模型的输入。
[0057]
步骤4,可构建rnn模型预测管道内检测器过球时刻,将cnn模型的输出作为rnn模型的输入。
[0058]
步骤5,可从样本集a1、a2、a3中各对应选取一部分作为训练样本集,将其余的部分
作为测试样本集;比如随机选取相互对应a1、a2、a3样本集的80%为训练样本集,将其余的20%作为测试样本集;用训练样本集训练cnn模型及rnn模型;用测试样本集测试cnn模型及rnn模型;
[0059]
可以随机选取n份原始数据样本集a;可用小波包分解-软阈值的方法对样本集a进行降噪处理,得到样本集a1;可对样本集a进行时频域特征提取,得到信号特征样本集a2;可对样本集a进行能量谱特征提取得到信号能量谱特征样本集a3。将a1、a2、a3中相互对应的数据中取出的80%作为训练样本集,将其余的20%作为测试样本集;通过训练和测试,得到cnn模型的训练误差;根据cnn模型的训练误差,优化cnn模型的网络参数。
[0060]
对上述训练样本集和测试样本集再采用训练完成的cnn模型进行分类识别,得到已分类识别的训练样本集和测试样本集;用已分类识别的训练样本集作为rnn模型的训练样本,用已分类识别的测试样本集作为rnn模型的测试样本;对rnn模型进行训练和测试,根据rnn模型训练误差,优化rnn模型的网络参数。
[0061]
步骤6,可按照步骤2中处理样本集a的方法,对实时采集的管道振动信号进行处理;将处理后的数据依次经过训练完成的cnn模型及rnn模型,得到管道内检测器过球时刻。
[0062]
设实时采集的管道振动信号为b,对实时采集的管道振动信号b,可用小波包分解-软阈值的方法进行降噪处理,得到降噪后的管道振动信号b1;可对实时采集的管道振动信号b进行时频域特征提取,得到管道振动信号的信号特征b2;可对实时采集的管道振动信号b进行能量谱特征提取,得到管道振动信号的信号能量谱特征b3。将b1、b2、b3作为cnn模型的输入,输入至训练完成的cnn模型中,cnn模型的输出再作为rnn模型的输入,由rnn模型输出管道内检测器的定位信号数据。
[0063]
小波包分解-软阈值的方法可包括如下步骤:
[0064]
(1)分解过程:选定一种小波,对信号进行n层小波(小波包)分解。
[0065]
(2)作用阈值过程:对分解得到的各层系数选择一个阈值,并对细节系数作用软阈值处理。
[0066]
(3)重建过程:对处理后的系数通过小波(小波包)重建恢复原始信号。
[0067]
进一步地,步骤1中,可采用滑动且叠加的时间窗,对管道振动信号进行数据提取;可采用z-score标准化的方法,对数据样本集进行归一化;可用中值校正方法对数据样本集进行校正处理。
[0068]
进一步地,步骤2中,可设样本集a=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];其中i为工况类别;x
ig
为第i类数据样本集的第g个数据;m为样本数量;可用小波包分解-软阈值的方法进行降噪处理;得到t
×
t的小波包模均值矩阵可用markov方法进行特征提取;得到t
×
t的矩阵可用markov方法提取能量谱特征,得到t
×
t的系数时频图其中t
×
t=m。
[0069]
进一步地,用小波包分解-软阈值的方法对样本集a进行降噪处理的具体方法可如
下:可对信号进行基于db7的3层小波包分解;并可对小波包分解系数进行逆小波重构。
[0070]
进一步地,步骤2可包括如下分步骤:
[0071]
步骤a1,对markov链上下边界的选取如下:b、a分别表示窗体的上边界、下边界;其中表示该数据段的均值,x
max
、x
min
分别表示该数据段的最大值、最小值;这里取窗体的边界比例系数λ=0.01;
[0072]
步骤a2,将状态数划分为5个,设初始状态的步长step1=q
1-a;设中间状态的步长step2=q
i+1-qi{i=1,2,3};设终止状态的步长为step3=b-q4;其中q1为该数据段的1/5分位数,q4为该数据段的4/5分位数;
[0073]
步骤a3,构造markov链:将漏磁信号进行x(i)到s(i)的转换;当x(i)∈(a,a+step1]时,s(i)=1;当x(i)∈(qi,qi+step2]时,s(i)=i+1{i=1,2,3};当x(i)∈(q4,q4+step3],s(i)=5;
[0074]
步骤a4,提取markov特征:其中为状态上移次数,为状态下移次数,ki为状态保持次数,s(j)为j时刻的状态,s(j+1)为j+1时刻的状态,l表示窗体内数据段的长度;将通过上步方法得到的各个状态的转移次数矩阵转换为一维行向量通过得到状态转移概率矩阵;其中k为对应状态转移次数矩阵,k
[i][j]
为状态i向状态j的转移次数。
[0075]
进一步地,步骤3中,cnn模型可基于vgg16模型构建。选择vgg16模型作为管道振动信号分类识别的基本结构;输入结构为224
×
224
×
3,改进后的输入层仍为三通道,识别对象为样本集a1、a2、a3。
[0076]
进一步地,步骤3可包括如下分步骤:
[0077]
步骤b1,将样本集a1、a2、a3数据输入到卷积层时,卷积层中的卷积核对输入至该层的特征按照卷积核大小和步长做卷积运算;l
out
为当前卷积层的输入尺寸,l
in
为当前层输入尺寸,k为当前卷积层的卷积核尺寸,s为前层的卷积步长;卷积核对当前层的输入进行卷积运算的数学公式为前层的输入进行卷积运算的数学公式为为当前卷积层输入,k
ij
为当前卷积层的权重矩阵,bj为当前卷积层的偏置项向量,f
cov
()为卷积运算,x
jout
为当前卷积层运算后的输出;
[0078]
步骤b2,数据样本集从卷积层到池化层中,池化层可对数据进行降采样处理;选择relu激活函数f
relu
(x)=max(0,x)作为非线性激活函数,连接卷积层和全连接层;
为全连接层的输入,为全连接层输出,w
ij
为全连接层输入与输出之间的权重矩阵,bj为偏置项向量,f
fc
()为激活函数;
[0079]
步骤b3,可用损失函数l(p,y)=-∑y
n log(pn),n∈[1,n]来计算估计输出和真实标签的差异,y为真实标签输出,p为所有输出类别的概率,n为输出层神经元个数;用softmax函数计算每个类的概率,为网络中前一次的非归一化输出结果;在使用交叉熵损失函数kl(p∥y)=l(p,y)-h(p)来优化卷积神经网络参数,kl(p∥y)为最小化预测输出p和真实标签y之间的kl散度,l(p,y)、h(p)分别为最小化预测输出p和真实标签y的交叉熵l和熵h。
[0080]
进一步地,可建立基于bi-lstm的rnn模型。可采用dropout模型和bn模型优化rnn模型的网络参数。
[0081]
可设rnn的训练样本集x=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];其中i为工况类别;x
ig
为第i类样本集的第g个数据;m为样本数量;将x=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];转换为作为rnn模型的样本输入;其中,s
×
m=m;可采用均方误差模型来进行损失函数的计算,yi为rnn的预测输出,为真实时间标签,m为样本数;得到rnn模型训练误差;构建dropout模型和bn模型,来优化rnn模型的网络参数。
[0082]
构建的rnn模型输入为s
×
m的矩阵;将样本集s
×
m=m作为rnn模型的样本输入;设时刻t的输入记为x
(t)
,隐藏状态为h
(t)
。隐藏状态的计算公式如下所示:h
(t)
=σ(ux
(t)
+wh
(t-1)
+b),σ为隐藏层的激活函数,u为循环节点的输入权重,w为状态权重,b为隐藏层偏置。h
(t)
由x
(t)
和t-1时刻的隐藏状态h
(t-1)
得到,t时刻的输出为y
(t)
,y
(t)
=λ(vh
(t)
+c),λ为输出层的激活函数,v为输出层节点权重,c为输出层偏置。采用均方误差来进行损失函数的计算,yi为rnn的预测输出,为真实时间标签,m为样本数。
[0083]
下面以本发明的一个优选实施例来进一步说明本发明的工作流程及工作原理:
[0084]
本发明的目的是提供一种基于cnn分类和rnn预测的管道内检测器定位方法,实现复杂环境背景以及多变的管道工况下振动信号振源准确识别,从而提高内检测器定位系统的精准度以及指向性能。
[0085]
如图1所示,为本发明的一种基于cnn分类和rnn预测的管道内检测器定位方法的流程图。
[0086]
本发明首先进行原始振动信号数据样本的归一化和分类截取,然后对预处理的原始振动信号数据样本进行的降噪处理及特征提取,得到初始的输入样本集,在建立cnn模型并进行训练,接着基于cnn模型进行分类识别,得到已分类识别的样本集,再建立rnn模型并训练,对已分类识别的样本集基于rnn模型进行管道内检测器定位;最后由训练好的cnn分
类网络和rnn回归网络对管道内检测器进行定位。
[0087]
本发明的基于cnn分类和rnn预测的管道内检测器定位方法,具体如下:
[0088]
步骤1:原始振动信号数据样本的归一化和分类截取:提取管道信号的原始数据样本,构成初始振动信号数据样本集,所述初始振动信号数据样本为工况实测样本;采用滑动且叠加的时间窗,对初始管道振动信号数据样本集进行数据预处理;采用z-score标准化的方法,对初始管道振动信号数据样本集进行归一化;用中值校正方法对数据样本集进行校正;对采集到的管道振动信号数据进行分类截取;得到原始数据样本集xi=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];m为所述样本集x的个数;i为工况类别;x
ig
为第i类数据样本集的第g个数据;每类有n份;
[0089]
步骤1.1:采用z-score标准化的方法转换函数如式μ为数据样本期望,σ为样本数据标准差;
[0090]
步骤1.2:采用的中值校正方法为步骤1.2:采用的中值校正方法为表示基值校准后的第i个传感器在第j个里程点的磁场强度,bj表示基值校准前的第i个传感器在第j个里程点的磁场强度,k表示传感器的通道数,v
median
为第i个传感器的中值电压,v
ref
为霍尔传感器的基准电压值,p为放大倍数,sens为霍尔传感器的灵敏度值。
[0091]
在本实施例中,m=5184,i=1,2,3,4,n=700;振动信号所对应的管道和内检测器状态分为以下四类:管道内检测器通过焊缝过程信号(ⅰ)、管道内检测器通过信号采集点过程信号(ⅱ)、管道内检测器未通过采集点未通过焊缝且管道未受到工况干扰信号(ⅲ)和管道受到工况干扰或人工干扰过程信号(ⅳ),每类采集700份样本。
[0092]
所述步骤2包括下述步骤:
[0093]
步骤2.1:小波包分解-软阈值的方法进行降噪处理:计算原始管道振动信号的小波包变换:本发明选择db7为小波基,分解层次为3,对信号进行基于db7的3层小波包分解。对小波包分解系数进行逆小波重构,得到滤波后信号。
[0094]
步骤2.2包括下述步骤:
[0095]
步骤2.2.1:对markov链上下边界的选取如下:b、a分别表示窗体的上边界、下边界;其中表示该数据段的均值,x
max
、x
min
分别表示该数据段的最大值、最小值;这里取窗体的边界比例系数λ=0.01;
[0096]
步骤2.2.2:将状态数划分为5个,设初始状态的步长step1=q
1-a;设中间状态的步长step2=q
i+1-qi{i=1,2,3};设终止状态的步长为step3=b-q4;其中q1为该数据段的1/5分位数,q4为该数据段的4/5分位数;
[0097]
步骤2.2.3:构造markov链:将漏磁信号进行x(i)到s(i)的转换;当x(i)∈(a,a+step1]时,s(i)=1;当x()i(∈,q
i qi+st]ep2时,s(i)=i+1{i=1,2,3};当x(i)∈(q4,q4+step3],s(i)=5;
[0098]
步骤2.2.4:提取markov特征:其中为状态上移次数,为状态下移次数,ki为状态保持次数,s(j)为j时刻的状态,s(j+1)为j+1时刻的状态,l表示窗体内数据段的长度。将通过上步方法得到的各个状态的转移次数矩阵转换为一维行向量通过得到状态转移概率矩阵;其中k为对应状态转移次数矩阵,k
[i][j]
为状态i向状态j的转移次数;
[0099]
步骤3:cnn模型的建立与分类识别
[0100]
如图2所示,为本发明的cnn模型的基本结构图。卷积神经网络(cnn)是根据视觉细胞研究启发而创立的一种神经网络,它的优势在于能够以图片和矩阵作为网络输入,能够自适应的挖掘网络输入中的特征和敏感信息,与标准神经网络的最大区别在于它的每个单元是二维甚至高维的卷积核,通过卷积核与该层的输入进行卷积运算。
[0101]
如图3所示,为本发明的vgg16模型结构图。vgg16为16层cnn网络,具有13个卷积层和3个全连接层,卷积层采用连续的卷积核代替较大的卷积核。其优势不仅在增强模型非线性上有所体现,也加大神经网络深度,能够确保对更加复杂信号特征的学习,还能够去除冗余参数变量,提升网络收敛速度。
[0102]
本发明中,选择vgg16模型作为cnn模型的基本结构,改进vgg16模型的输入层,将所述样本集a、b、c作为初始输入样本集,经过cnn模型的分类识别,得到输出样本集xi=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];i为具体某一工况类别;随机选取n份原始数据样本集xi=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];中的80%作为训练样本集,通过训练,得到cnn模型的训练误差;优化cnn模型的网络参数;本实施例中,识别到的工况类别为第二类,即i=2;
[0103]
步骤3.1:建立cnn模型:选择vgg16模型作为管道振动信号分类识别的基本结构;输入结构为224
×
224
×
3,改进后的输入层仍为三通道,识别对象为上述样本集a、b、c。
[0104]
如图4所示,为本发明的基于多通道cnn管道振动信号识别流程图。本发明中,基于cnn模型进行分类识别,经小波包函数降噪和特征提取后的数据样本集作为输入,卷积层中的卷积核对输入至该层的特征做卷积运算;再由池化层对数据进行降采样处理;接着选择relu激活函数作为非线性激活函数层连接再卷积层和全连接层,根据训练误差调整网络参数,得到输出xi=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];本实施例中,t=72,i=2。
[0105]
本发明的基于cnn模型的分类识别的具体步骤如下:
[0106]
步骤3.2:基于cnn模型的分类识别:
[0107]
步骤3.2.1:原始数据样本集步骤3.2.1:原始数据样本集由输入层到卷积层时,卷积层中的卷积核对输入至该层的特征按照卷积核大小和步长做卷积运算;l
out
为当前卷积层的输入尺寸,l
in
为当前层输入尺寸,k为当前卷积层的卷积核尺寸,s为前层的卷积步长;卷积核对当前层的输入进行卷积运算的数学公式为算的数学公式为为当前卷积层输入,k
ij
为当前卷积层的权重矩阵,bj为当前卷积层的偏置项向量,f
cov
()为卷积运算,为当前卷积层运算后的输出。
[0108]
步骤3.2.2::数据样本集从卷积层到池化层中,池化层对数据进行降采样处理;选择relu激活函数f
relu
(x)=max(0,x)作为非线性激活函数层连接再卷积层和全连接层;(x)=max(0,x)作为非线性激活函数层连接再卷积层和全连接层;为全连接层的输入,为全连接层输出,w
ij
为全连接层输入与输出之间的权重矩阵,bj为偏置项向量,为激活函数。
[0109]
如图5、6所示,为本实施例中的基于多通道cnn和原始信号cnn对于管道振动信号训练速度和识别率的对比图。图中多通道的cnn曲线对应输入为三通道信号特征的cnn模型,单通道的cnn曲线对应以管道原始振动信号为输入的cnn模型,从图中可以看出,由于多通道的cnn特征曲线为三通道特征输入,所以在训练的起始阶段准确率较低,但经过7~8轮的迭代两模型准确率都达到90%,总体来说两模型收敛速度相差不大。经过30轮迭代,可以看出两模型趋于收敛,准确率分别达到96.01%和93.28%,损失值为0.128和0.189。可以看出,与未经过特征提取的原始管道振动信号相比,将管道振动信号特征输入到网络能够获得更高的识别率和更低的损失。
[0110]
步骤3.2.3:用损失函数l(p,y)=-∑y
n log(pn),n∈[1,n]来计算估计输出和真实标签的差异,y为真实标签输出,p为所有输出类别的概率,n为输出层神经元个数。用softmax函数计算每个类的概率,为网络中前一次的非归一化输出结果;在使用交叉熵损失函数kl(p∥y)=l(p,y)-h(p)来优化卷积神经网络参数,kl(p∥y)为最小化预测输出p和真实标签y之间的kl散度,l(p,y)、h(p)分别为最小化预测输出p和真实标签y的交叉熵l和熵h。
[0111]
如图7所示,为本发明的rnn模型的结构图。循环神经网络(rnn)能对过去的数据产生记忆状态,将数据在时间维度上建立联系。rnn之前时刻输入的数据都会影响后续的输入,而且rnn内部神经元之间互相连接,对输入信号在时序熵的变化更加敏感,更有利于提取管道振动信号的时序特征。
[0112]
如图8所示,为本发明的基于bi-lstm的管道内检测器过球时刻精准辨识的网络结
构;lstm能够记忆和学习长时间序列的输入,能够很好的挖掘时间序列的特征,同时支持输入多个并行序列。
[0113]
步骤4:rnn模型的建立与回归预测:构建rnn模型的多对一模式,建立基于bi-lstm的管道内检测器过球时刻精准辨识的网络结构;将上述样本集xi=[x
i1
;x
i2
;
…
x
ig
…
;x
im
];;改为作为rnn模型的样本输入;其中i为具体某一工况类别,s
×
m=m;采用均方误差(mse)模型;得到网络训练误差;构建dropout模型和bn模型,优化rnn模型的网络参数;将训练好的rnn预测算法对管道内检测器过球时刻进行回归预测;
[0114]
如图9所示,为本发明的基于rnn的管道内检测器过球时刻精准辨识的预测流程图,具体步骤如下:
[0115]
步骤4.1:建立rnn模型:构建的rnn模型输入为s
×
m的矩阵;将样本集s
×
m=m作为rnn模型的样本输入;设时刻t的输入记为x
(t)
,隐藏状态为h
(t)
。h
(t)
=σ(ux
(t)
+wh
(t-1)
+b),σ为隐藏层的激活函数,u为循环节点的输入权重,w为状态权重,b为隐藏层偏置。h
(t)
由x
(t)
和t-1时刻的隐藏状态h
(t-1)
得到,t时刻的输出为y
(t)
,其计算公式为:y
(t)
=λ(vh
(t)
+c),λ为输出层的激活函数,v为输出层节点权重,c为输出层偏置。本实施例中,特征维度s=576,时间步长m=9。
[0116]
步骤4.2:采用均方误差来进行损失函数的计算,yi为rnn的预测输出,为真实时间标签,m为样本数。
[0117]
步骤5:管道内检测器的定位识别:构建基于cnn的分类网络和基于rnn的回归网络;随机选取n份原始数据样本集xi=[x
i1
;x
i2
;
…
x
ig
…
;x
im
]中的80%作为训练样本集,部分作为测试样本集;进行管道内检测器的定位识别。
[0118]
如表1所示,为本实施例中神经网络的方法与传统其他方法利用svm模型、knn模型以及决策树对管道振动信号识别的准确率数据。从表1可以看出,多通道特征输入的cnn能够很好处理管道振动信号分类识别,准确率达到了96.0%,通道特征输入的cnn分类效果明显好于其他三种分类方法,能够达到管道内检测器精准过球辨识第一阶段的目标。
[0119]
表1
[0120][0121]
如表2所示,为本实施例中采用传统的机器学习模型支持向量机回归(svr)、高斯回归与bi-lstm和lstm做对比,采用平均绝对误差(mae)、均方误差(mse)和r方作为各模型的评价指标。mae和mse指标越小表示模型的预测效果越好,而r方的取值是介于0与1之间,其值越接近1,则表示预测与实际越接近,拟合程度越好。从表2中可以看出bi-lstm模型的mae和mse指标要明显小于传统的机器学习模型,而r方指标更接近于1。证明了bi-lstm在管道内检测器过球时刻精准预测方面优于其它模型,其预测效果更加准确和稳定。
[0122]
表2
[0123][0124]
以上所述的实施例仅用于说明本发明的技术思想及特点,其目的在于使本领域内的技术人员能够理解本发明的内容并据以实施,不能仅以本实施例来限定本发明的专利范围,即凡本发明所揭示的精神所作的同等变化或修饰,仍落在本发明的专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1