一种陆基GNSS反射计的河流流速与水位反演方法
一种陆基gnss反射计的河流流速与水位反演方法
技术领域
1.本发明涉及河流测量领域,特别是涉及一种陆基gnss反射计的河流流速与水位反演方法。
背景技术:
2.gnss反射信号(global navigation satellite system
‑
reflection),利用现有的导航卫星信号通过协同接收、处理直达和经地表反射的导航卫星信号实现地表物理参数的反演和监测,是一种双基机会源探测手段,具有成本低、功耗低、重量轻的优点。其l波段在降雨条件下信号衰减小,适合于降雨等恶劣条件的监测。另外,陆基探测可利用成熟的多通道导航射频、相关器芯片完成信号处理实现快速处理和监测。
3.我国在河流监测方面目前常用手段为基于接触式缆道无线测流的水位站观测。该方式在财力、物力方面均消耗巨大,且很难满足野外刮风、降雨、洪水汛期等复杂环境的需求,使得我国偏远、气候恶劣地区的水文站点稀疏或者缺失,获得的河流水文信息极其有限。遥感技术的发展使得流速摄像法、甚高频(uhf)地波雷达、主被动微波雷达以及星载多光谱等非接触式河流监测手段涌现。尽管上述非接触式监测手段在一定程度上补充了较大尺度及欠发达地区河流水文信息的观测,但存在如下不足:1)均是对河流边界、水位、流速等单一参数进行针对性监测(例如甚高频地波雷达仅用于流速监测);2)均采用河流边界、水位、流速等参数和实测河流流量建立经验关系实现河流监测;3)星载高度计、sar、多光谱等遥感手段由于分辨率和大气层影响,在狭窄河流区域、降雨等恶劣条件受到制约,且时间采样率低、实时性差、成本和功耗高。随着日益增长的河流水文信息需求,迫切需要一种便捷、成本低廉、且支持多参数一体化实时监测的方法。
技术实现要素:
4.本发明的目的是提供一种陆基gnss反射计的河流流速与水位反演方法,以实现对河流流速和水位进行低成本和高精度的探测。
5.为实现上述目的,本发明提供了如下方案:
6.一种陆基gnss反射计的河流流速与水位反演方法,包括:
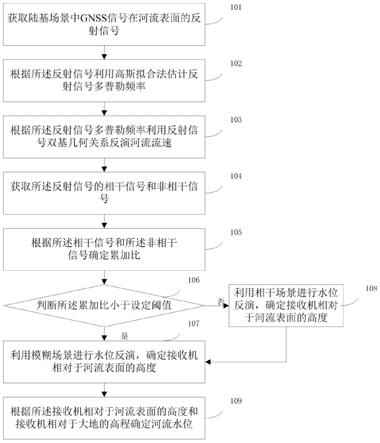
7.获取陆基场景中gnss信号在河流表面的反射信号;
8.根据所述反射信号利用高斯拟合法估计反射信号多普勒频率;所述反射信号多普勒频谱为估计的河流流速引起的gnss反射信号多普勒频率;
9.根据所述反射信号多普勒频率利用反射信号双基几何关系反演河流流速;
10.获取所述反射信号的相干信号和非相干信号;
11.根据所述相干信号和所述非相干信号确定累加比;
12.判断所述累加比是否小于设定阈值,得到第一判断结果;
13.当所述第一判断结果表示所述累加比小于设定阈值时,则利用模糊场景进行水位反演,确定接收机相对于河流表面的高度;
14.当所述第一判断结果表示所述累加比大于或者等于设定阈值时,则利用相干场景进行水位反演,确定接收机相对于河流表面的高度;
15.根据所述接收机相对于河流表面的高度和接收机相对于大地的高程确定河流水位。
16.可选的,所述获取陆基场景中gnss信号在河流表面的反射信号之后,还包括:
17.获取接收机中接收的反射功率和直射功率;
18.根据所述反射功率和所述直射功率确定反射率;
19.判断所述反射率是否大于反射率阈值,得到第二判断结果;
20.若所述第二判断结果表示所述反射率大于反射率阈值,则根据所述反射信号利用高斯拟合法估计反射信号多普勒频率;
21.若所述第二判断结果表示所述反射率小于或者等于反射率阈值,则返回步骤“获取接收机中接收的反射功率和直射功率”。
22.可选的,所述根据所述反射信号利用高斯拟合法估计反射信号多普勒频率,具体包括:
23.根据所述反射信号利用welch谱估计法进行估计,得到反射信号相对于直射信号多普勒频率;
24.根据所述反射信号相对于直射信号多普勒频率利用高斯拟合法估计反射信号多普勒频率。
25.可选的,所述根据所述反射信号相对于直射信号多普勒频率利用高斯拟合法估计反射信号多普勒频率,具体包括:
26.根据如下公式估计反射信号多普勒频率:
[0027][0028]
其中,为估计的河流流速引起的gnss反射信号多普勒频率,ψ(f)为反射信号相对于直射信号多普勒频率,为估计高斯分布标准差,f为多普勒频率,μ为多普勒偏移频谱在高斯分布下的均值,σ为多普勒偏移频谱在高斯分布下的标准差。
[0029]
可选的,所述河流流速的反演公式为:
[0030][0031]
其中,为河流流速,为估计的河流流速引起的gnss反射信号多普勒频率,φ为河流流向和gnss卫星方位向之间的夹角,θ为gnss卫星高度角,f
c
为gnss卫星信号载波频率,c为光速。
[0032]
可选的,所述当所述第一判断结果表示所述累加比小于设定阈值时,则利用模糊场景进行水位反演,确定接收机相对于河流表面的高度,具体包括:
[0033]
采用非相干叠加法提取所述反射信号的相干成分;
[0034]
根据所述相干成分进行非相干叠加得到所述反射信号的时延波形;
[0035]
跟踪所述反射信号的时延波形得到反射信号相对于直射信号的时延;
[0036]
根据所述反射信号相对于直射信号的时延利用双基几何关系确定接收机相对于河流表面的高度;
[0037]
利用通道交叉法对所述接收机相对于河流表面的高度进行校正,确定最终的接收机相对于河流表面的高度。
[0038]
可选的,所述当所述第一判断结果表示所述累加比大于或者等于设定阈值时,则利用相干场景进行水位反演,确定接收机相对于河流表面的高度,具体包括:
[0039]
对所述反射信号进行载波相位估计,得到相位时序;
[0040]
对所述相位时序进行相位补偿,得到补偿后的相位时序;
[0041]
对补偿后的相位时序利用非周期采样的长序列谱估计法进行谱估计,确定接收机相对于河流表面的高度。
[0042]
可选的,所述河流水位的计算公式如下:
[0043]
h
r
=h
rec
‑
h
rec
[0044]
其中,h
r
为河流水位,h
rec
为接收机相对大地参考坐标的高程,h
rec
为接收机相对于河流表面的高度。
[0045]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0046]
本发明提供的陆基gnss反射计的河流流速与水位反演方法,通过将gnss反射信号技术应用到陆河边界与河流流速反演上,信号源丰富,成本低,通过累加比选择相干场景或者模糊场景进行行水位反演,提供反演精度。
附图说明
[0047]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0048]
图1为本发明提供的陆基gnss反射计的河流流速与水位反演方法流程图;
[0049]
图2为本发明提供的陆基gnss反射计的河流流速与水位反演方法在实际应用中的流程图;
[0050]
图3为本发明提供的河流流速和水位反演时序图。
具体实施方式
[0051]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0052]
本发明的目的是提供一种陆基gnss反射计的河流流速与水位反演方法,以实现对河流流速和水位进行低成本和高精度的探测。
[0053]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0054]
如图1所示,本发明提供的一种陆基gnss反射计的河流流速与水位反演方法,包
括:
[0055]
步骤101:获取陆基场景中gnss信号在河流表面的反射信号。
[0056]
在实际应用中,步骤101,还包括:
[0057]
获取接收机中接收的反射功率和直射功率。根据所述反射功率和所述直射功率确定反射率。判断所述反射率是否大于反射率阈值,得到第二判断结果。若所述第二判断结果表示所述反射率大于反射率阈值,则根据所述反射信号利用高斯拟合法估计反射信号多普勒频率;若所述第二判断结果表示所述反射率小于或者等于反射率阈值,则返回步骤“获取接收机中接收的反射功率和直射功率”。
[0058]
步骤102:根据所述反射信号利用高斯拟合法估计反射信号多普勒频率;所述反射信号多普勒频谱为估计的河流流速引起的gnss反射信号多普勒频率。
[0059]
其中步骤102,具体包括:
[0060]
根据所述反射信号利用welch谱估计法进行估计,得到反射信号相对于直射信号多普勒频率。
[0061]
根据所述反射信号相对于直射信号多普勒频率利用高斯拟合法估计反射信号多普勒频率。其中,所述根据所述反射信号相对于直射信号多普勒频率利用高斯拟合法估计反射信号多普勒频率,具体包括:根据如下公式估计反射信号多普勒频率:
[0062][0063]
其中,为估计的河流流速引起的gnss反射信号多普勒频率,ψ(f)为反射信号相对于直射信号多普勒频率,为估计高斯分布标准差,f为多普勒频率,μ为多普勒偏移频谱在高斯分布下的均值,σ为多普勒偏移频谱在高斯分布下的标准差。
[0064]
步骤103:根据所述反射信号多普勒频率利用反射信号双基几何关系反演河流流速。其中,所述河流流速的反演公式为:
[0065][0066]
其中,为河流流速,为估计的河流流速引起的gnss反射信号多普勒频率,φ为河流流向和gnss卫星方位向之间的夹角,θ为gnss卫星高度角,fc为gnss卫星信号载波频率,c为光速。
[0067]
步骤104:获取所述反射信号的相干信号和非相干信号。
[0068]
步骤105:根据所述相干信号和所述非相干信号确定累加比。
[0069]
步骤106:判断所述累加比是否小于设定阈值,得到第一判断结果;当所述第一判断结果表示所述累加比小于设定阈值时,则执行步骤107;当所述第一判断结果表示所述累加比大于或者等于设定阈值时,则执行步骤108。
[0070]
步骤107:利用模糊场景进行水位反演,确定接收机相对于河流表面的高度;其中,步骤107,具体包括:
[0071]
采用非相干叠加法提取所述反射信号的相干成分。
[0072]
根据所述相干成分进行非相干叠加得到所述反射信号的时延波形。
[0073]
跟踪所述反射信号的时延波形得到反射信号相对于直射信号的时延。
[0074]
根据所述反射信号相对于直射信号的时延利用双基几何关系确定接收机相对于河流表面的高度。
[0075]
利用通道交叉法对所述接收机相对于河流表面的高度进行校正,确定最终的接收机相对于河流表面的高度。
[0076]
步骤108:利用相干场景进行水位反演,确定接收机相对于河流表面的高度;其中,步骤108具体包括:
[0077]
对所述反射信号进行载波相位估计,得到相位时序。
[0078]
对所述相位时序进行相位补偿,得到补偿后的相位时序。
[0079]
对补偿后的相位时序利用非周期采样的长序列谱估计法进行谱估计,确定接收机相对于河流表面的高度。
[0080]
步骤109:根据所述接收机相对于河流表面的高度和接收机相对于大地的高程确定河流水位。其中,所述河流水位的计算公式如下:
[0081]
h
r
=h
rec
‑
h
rec
[0082]
其中,h
r
为河流水位,h
rec
为接收机相对大地参考坐标的高程,h
rec
为接收机相对于河流表面的高度。
[0083]
如图2
‑
3所示,本发明还提供了一种陆基gnss反射计的河流流速与水位反演方法在实际应用中的具体流程,步骤如下:
[0084]
在信号层面,河流流速主要被调制在gnss反射信号频率上。在陆基场景,由于gnss信号到达河流表面的多普勒频率和直达信号的相同,因此反射信号相对于直达信号的多普勒频率偏差仅由河流流动引起,即δf=f
flow
,其中,
△
f为反射信号到达天线时的频率与直射信号到达天线时候的差值,f
flow
为河流流动引起的频率差值。
[0085]
由于welch法对谱估计数据进行分段时,不同数据段可存在重叠,较一般周期图法有更好的方差性能,且数据段的窗函数有多种选择可更好的控制旁瓣泄露,因此,通过welch谱估计得到gnss反射信号相对于直射信号的多普勒频率:
[0086][0087][0088]
基于welch谱,通过数据统计计算,得到反射信号的多普勒频率。此处为welch谱公式。其中,w(n)为窗函数;m为窗函数长度;s为数据分段个数;ψ
i
(f)为第i个序列基于welch谱公式的频率函数,f为频率,n为在各自序列中的点序数,i为序列数,j为虚数,ψ(f)为多序列计算后得到的多普勒函数,yi(n)为分段数据,具体为:
[0089]
y
i
(n)=y
rmax
((i
‑
1)k+n)
[0090]
其中,y
imax
(n)表示反射信号功率峰值对应的复数相干值序列;k表示分段之间的重叠的数据点数。
[0091]
如图2所示,在判断符合场景的反射率后,对峰值频率求解。分析岸基场景的gnss海面反射信号的谱特性时发现gnss反射信号的谱近似呈高斯函数分布。其中反射率为反射功率与直射功率之比,两个值可以从接收机获取。基于此,通过高斯拟合的方法估计gnss反
射信号的频谱特征值:
[0092][0093]
其中,为谱估计的峰值频率,即估计的河流流速引起的gnss反射信号多普勒频率。
[0094]
接下来实现流速反演,gnss反射信号相对于直达信号的多普勒频率由河流流速在gnss反射信号径向引起,可根据gnss反射信号双基几何关系得到:
[0095][0096]
其中,v
flow
为河流径流流速;φ为河流流向和gnss卫星方位向之间的夹角;θ为gnss卫星高度角;f
c
为gnss卫星信号载波频率;c为光速。根据上式以及估计的gnss反射信号相对于直达信号的多普勒频率反演河流流速:
[0097][0098]
其中,为河流径流流速反演值。
[0099]
下一步进行相干指示计算,相对于伪码,载波测距的精度高,水位反演精度高。但是载波测量需要gnss反射信号相位连续可估计。由于河流粗糙度的影响,gnss反射信号既包含了相干信号,也包含了非相干信号。相干信号载波相位连续可估计,而非相干成分的相位服从均匀随机分布。因此,当gnss反射信号主成分为相干信号,而非相干成分可忽略时,gnss反射信号的载波相位连续可估计,在此场景可利用载波相位测量水位;当非相干成分不可忽略时,gnss反射信号的载波相位呈现随机性,在此场景只能利用伪码测量水位。基于此,采用相干/模糊场景判决的伪码/载波协同的水位反演策略。当场景判决为相干时,采用载波相位测量;而为非相干时,采用伪码测量。本课题采用上述式定义的相干/非相干累加比进行相干和模糊场景的判决,即
[0100][0101]
其中,cir为相干/非相干累加比,y
i
(τ)为反射信号,其中分子为反射信号在一段时间内(时间序列i内)相干累加信号,分母为反射信号在一段时间内(时间序列i内)非相干累加信号,t
c
为判决阈值。通过理论研究和试验数据分析确定上述阈值。当相干/非相干累加比大于阈值时,gnss反射信号的载波相位连续可估计,利用载波相位反演水位,而小于阈值为模糊场景,载波相位不可估计,利用伪码反演水位。通过伪码和载波协同保证水位测量的连续性和高精度。
[0102]
另外,模糊场景下由于非相干成分的影响使载波相位不可估计,因此只能采用伪码进行水位反演,如图3(a)所示,图3(a)为利用模糊场景进行水位反演的示意图。
[0103]
gnss反射信号的相干成分和非相干信号的时延波形分别服从λ(τ)和∫λ(τ
‑
τ
(ρ))dρ,τ是相干信号下,直反信号时延差,ρ是反射非相干信号的微分向量,τ(ρ)是在ρ下的非相干信号下的时延偏差,其中,λ(τ)为直/反信号的自相关函数。非相干成分使得gnss反射信号的时延波形并非和直达信号的完全一样,通过跟踪时延波形峰值点将得到有偏差的反射相对于直达信号时延,使得反演的水位存在一定偏差。针对海面高度测量,已通过跟踪其他时延波形特征值(例如:时延波形前沿分位点)进行反射相对于直达信号时延的估计。但是该类特征点均是基于非相干散射场景提出的,并不适合相干和非相干散射混合模糊场景。基于此,通过如图3所示的首先相干累加的方法提取gnss反射信号的相干成分,然后非相干累加得到gnss反射信号时延波形。由于射频通道存在通道时延,因此对射频通道交替转换周期的前半周期和后半周期输出的时延波形分别进行非相干累加。
[0104]
如图3(b)所示,图3(b)为利用相干场景进行水位反演的示意图,由于时延波形采样率较低,无法满足高度反演精度的要求,因此采用三次样条法对上述得到的时延波形进行插值得到光滑的高采样时延波形。通过跟踪光滑时延波形得到gnss反射信号相对于直射信号的时延然后通过双基几何关系得到接收机相对于河流表面的高度h
rec
:
[0105][0106]
由于直达和反射信号通道时延不一致,导致了通过时延波形估计的反射信号相当于直达信号的时延存在一个固定的通道偏差。为了消除该偏差,本发明采用通道交叉校正。假设真实的反射相对于直达信号的时延为τ
spec
,射频通道1相对于通道2的偏差为δτ。当通道交替转换前半周期,反射和直达信号分别通过通道1和2进行放大和下变频,估计时延为其中,δτ为固定通道偏差,而在后半周期,反射和直达信号分别通过通道2和1进行放大和下变频,估计时延为利用前半周期和后半周期时延波形反演的高度分别为:
[0107][0108][0109]
从上式可以得到通道不一致校正的方法:
[0110][0111]
其中,h
rec1
为利用前半周期时延波形反演的高度,h
rec2
为利用后半周期时延波形反演的高度。
[0112]
载波相位采用四象鉴相器进行估计,假设反射信号功率峰值对应的复数相关值为y
rmax
(i)=i
rmax
(i)+jq
rmax
(i),则四象鉴相器输出的相位时序为:
[0113][0114]
其中,i
rmax
(i)为反射信号i路最大值,q
rmax
(i)为反射信号q路最大值。
[0115]
gnss反射信号的载波相位由两部分组成,一部分为河流流动导致的多普勒频率产
生的相位,一部分是反射信号相对于直达信号时延产生的相位。在利用载波相位进行水位反演前,必须对相位进行补偿消除多普勒频移产生的相位。首先对估计相位进行相位解缠得到连续的线性变化的相位:
[0116][0117]
其中,n
t
为观测期间估计相位经历的周期数。通过估计的反射信号多普勒频率对解缠后的相位进行补偿,即:
[0118][0119]
其中,t
int
为相干积分时间,为估计的信号载波相位,为估计的解缠前的载波相位。
[0120]
通过长期观测避免载波相位测距时的整周模糊度问题。载波相位和观测高度、卫星高度角存在关系:
[0121][0122]
其中,λ为波长。
[0123]
gnss卫星运动过程中卫星高度角是时间的函数。以卫星高度角为自变量对相位求导:
[0124][0125]
其中,为估计的载波相位频率。
[0126]
由反射相对于直达信号时延产生的相位的变化周期和高度成正比例关系。因此,本发明通过补偿后的相位进行谱估计得到接收机相对于河流表面的高度。由于卫星高度角呈非周期性采样特征,因此本发明拟采用非周期采样的ls(lomb
‑
scargle)法对时序进行谱估计。相比于利用短时序复数相关值估计河流流速,由于gnss卫星动态性导致的大范围高度角变化需长时间,因此该处为长序列谱估计。
[0127]
最终,假设接收机相对大地参考坐标的高程为h
rec
,则河流水位为:
[0128]
h
r
=h
rec
‑
h
rec
[0129]
gnss反射信号(global navigation satellite system
‑
reflection)通过协同接收、处理直达和经地表反射的导航卫星信号实现地表物理参数的反演和监测,具备以下优势:1)利用现有的导航卫星信号,是一种双基机会源探测手段,成本低、功耗低、重量轻;2)l波段在降雨条件下信号衰减小,适合于降雨等恶劣条件的监测;3)陆基探测可利用成熟的多通道导航射频、相关器芯片完成信号处理实现快速处理和监测;4)协同多信号特征量观测实现多参数一体化探测(信号时延测水位;信号功率测海冰)。本发明瞄准河流监测,另辟蹊径通过信号处理、信息提取和河流监测应用三个层面的研究,旨在为河流监测提供一种快速、低成本、精准的水位、流速探测手段。
[0130]
针对河流流速反演,本技术使用短时序谱估计反演河流流速的方法,利用相干/模糊场景判决的伪码/载波协同的河流水位反演方法,实现高精度水位反演。通过陆基接收机
接收处理直、反信号,实现河流流速与水位高度反演方法,为河流流速与水位探测提出一种新型的低成本、一体化的探测手段。
[0131]
在模糊场景下通过相干成分时延波形提取消除非相干成分,提高时延波形跟踪精度及水位反演精度;在相干场景下通过短、长时序两步谱估计法消除流速和水位在载波相位调制上的耦合,利用载波相位高精度反演水位。
[0132]
本发明的优点在于:
[0133]
一、本发明提出了一种陆基gnss反射计的河流流速反演方法,将gnss反射信号技术应用在陆河边界与河流流速反演上,信号源丰富,成本低。
[0134]
二、本发明利用了短时序谱估计,通过峰值求解,实现河流流速反演。
[0135]
三、本发明通过对直达和反射信号的射频通道在一定周期内进行交替转换,校正射频链路增益。
[0136]
四、本发明建立粗糙度因子与相干/非相干累加比之间的粗糙度矫正,并采用阈值判决得到陆表指示函数,实现陆河边界提取与河流宽度获取。
[0137]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0138]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1