基于频率捷变MIMO雷达的目标微波关联成像方法
基于频率捷变mimo雷达的目标微波关联成像方法
技术领域
1.本发明涉及雷达信号处理技术领域,特别涉及雷达成像技术,具体是一种基于频率捷变mimo雷达的目标微波关联成像方法,可应用于mimo雷达,实现目标微波关联成像。
背景技术:
2.频率捷变是指雷达发射的相邻脉冲信号的载频频率在一定的频率范围内快速变化,各个载频频率可以按照一定的规律变化,也可以随机变化。
3.mimo雷达是通过多个发射端发射正交波形,多个接收端接收各路散射信号并进行联合处理的新体制雷达系统。mimo雷达通过收发分离技术获得广阔的空间覆盖能力,通过发射正交波形和接收端匹配滤波获得多通道回波数据,基于这些特性可以实现多种功能,拓宽实际应用范围,是mimo雷达体制优越性的关键,也是传统相控阵雷达无法比拟的优势所在。
4.微波关联成像是一种新兴的成像方法,它起源于光学关联成像,由于其不依赖于雷达与目标间的相对运动关系,因此与传统的成像方法可以形成互补。微波关联成像方法采用微波作为信号源,在特定成像区域构造空时二维随机辐射场来模拟经典热光源强度关联成像中随机起伏的光场。微波信号源通过发射随机调制的信号,该信号在空间中非相干叠加,形成具有空间和时间二维非相干特性的随机辐射场。经过辐射场与目标区域的相互作用,使得回波中携带有目标信息,将这些回波信号与随机辐射场通过特定的成像算法进行运算处理,便可得到探测平面内目标的成像结果。针对基于频率捷变mimo雷达的目标微波关联成像方法,目前已有的研究主要有:
5.周小利.基于稀疏性的微波关联成像理论与方法[d].国防科学技术大学,2017;利用随机跳频波形模型,提出一种基于最小二乘法的微波关联成像方法来对目标进行凝视成像,但是该方法对模型误差和噪声敏感,较小的信号扰动就会导致成像失败。
[0006]
许然.提高雷达成像质量的若干新体制和新方法研究[d].西安电子科技大学,2015;基于相控阵雷达体制,提出了基于压缩感知的超分辨关联成像算法来对目标进行超分辨成像,但该方法计算量过大,不利于算法的实时处理。
[0007]
文才,张昕,阮锋,刘辉.基于空时二维随机辐射场的弹载雷达前视成像[j].火控雷达技术,2016,45(03):1
‑
6;提出了一种基于梯度投影稀疏重构的前视成像方法,但该方法在雷达平台运动时或目标自身运动时,成像质量下降。
[0008]
上述研究中有的方法对模型误差和噪声敏感;有的方法计算量过大,不利于算法的实时处理;有的方法在雷达平台运动时或目标自身运动时,成像质量下降。总之,现有技术中尚未有一个理想的频率捷变mimo雷达目标微波关联成像方法。
技术实现要素:
[0009]
针对现有技术存在的问题,本发明的目的在于提供一种基于频率捷变mimo雷达的目标微波关联成像方法,本发明通过发射信号的载频在脉冲间进行随机捷变,同时结合正
交匹配追踪算法,在获得稳定的成像结果同时,提高了成像算法对噪声扰动的容忍度,增强了算法的稳健性。
[0010]
为了达到上述目的,本发明采用以下技术方案予以实现。
[0011]
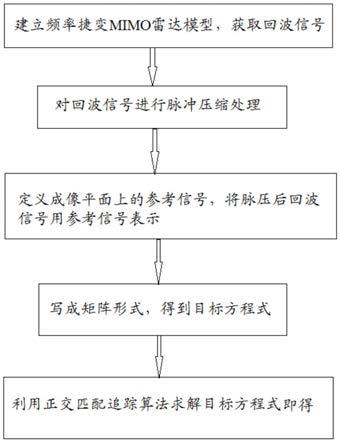
基于频率捷变mimo雷达的目标微波关联成像方法,包括以下步骤:
[0012]
(1)设mimo雷达发射端有m个发射天线,接收端有一个接收天线,各个天线依次线性排列,相邻发射天线间距为且以第一个天线为参考天线,其中m≥2,λ表示波长;
[0013]
(2)mimo雷达的m个发射天线以跳频间隔δf发射频率捷变信号,则m个发射天线在第l个脉冲内的发射信号为第l个脉冲内的发射信号为l表示脉冲总数;表示快时间,t
l
=lt
r
表示慢时间,t
r
表示脉冲重复周期;
[0014]
(3)将成像平面均匀划分为q个大小相同的成像网格,且设目标散射点位于成像网格中心,则目标散射系数表示为β=[β1,β2,
…
,β
q
]
t
,其中{
·
}
t
表示向量转置操作,β
q
表示第q个成像网格中心处的目标散射点的散射系数,q∈{1,2,
…
,q};
[0015]
(4)在第l个脉冲内,接收天线接收到的散射系数为β
q
的目标回波信号为将第l个脉冲内接收到的目标回波信号进行脉冲压缩处理,得到脉压后的目标回波信号s
q
(t
l
);
[0016]
(5)根据脉压后的目标回波信号s
q
(t
l
),定义成像平面上r
q
处的参考信号s
ref
(t
l
,r
q
),将脉压后的目标回波信号改写为用参考信号表示:s
q
(t
l
)=β
q
s
ref
(t
l
,r
q
);
[0017]
(6)将第l个脉冲内接收天线接收到的所有q个成像网格内目标的回波信号s(t
l
)用参考信号表示,并将其写成矩阵形式作为目标方程式;
[0018]
(7)利用正交匹配追踪算法求解所述目标方程式,得到目标散射系数的估计值即为目标微波关联成像结果。
[0019]
与现有技术相比,本发明的有益效果为:
[0020]
(1)本发明提高了对噪声扰动的容忍度。现有技术虽然能够实现高分辨成像,但是其成像结果具有众多副瓣,主瓣宽度有一定程度的展宽,并且对噪声非常敏感,较小的噪声扰动就可能导致成像失败。本发明通过发射信号的载频在脉冲间进行随机捷变,同时结合正交匹配追踪算法,在获得稳定的成像结果同时,提高了成像算法对噪声扰动的容忍度,增强了算法的稳健性。
[0021]
(2)应用范围广。现有的成像技术主要基于合成孔径雷达体制或者逆合成孔径雷达体制进行成像,但该体制雷达成像机制严重依赖于雷达平台与目标间相对运动关系,不能应用于静止场景,对不同成像场景的适应性不强,应用范围受限。本发明采用的频率捷变mimo雷达既可用于静止平台场景也可用于运动平台场景,实现对不同成像场景的适用。
附图说明
[0022]
下面结合附图和具体实施例对本发明做进一步详细说明。
[0023]
图1是本发明的实现流程图;
[0024]
图2是用本发明对原始目标场景的仿真结果图;
[0025]
图3是用本发明对微波关联成像结果的仿真结果图。
具体实施方式
[0026]
下面将结合实施例对本发明的实施方案进行详细描述,但是本领域的技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限制本发明的范围。
[0027]
参考图1,本发明提供的一种基于频率捷变mimo雷达的目标微波关联成像方法,包括以下步骤:
[0028]
(1)设mimo雷达发射端有m个发射天线,接收端有一个接收天线,各个天线依次线性排列,相邻发射天线间距为且以第一个天线为参考天线,其中m≥2,λ表示波长;
[0029]
本实施例针对存在一个目标的mimo雷达探测场景,假设该mimo雷达发射端有m个发射天线,接收端有1个接收天线,满足远场窄带条件。
[0030]
(2)mimo雷达的m个发射天线以跳频间隔δf发射频率捷变信号,则m个发射天线在第l个脉冲内的发射信号为第l个脉冲内的发射信号为l表示脉冲总数;表示快时间,t
l
=lt
r
表示慢时间,t
r
表示脉冲重复周期;
[0031][0032]
其中,rect(.)表示矩形包络,t
p
表示脉冲宽度,表示快时间,t
l
=lt
r
表示慢时间,l∈{1,2,
…
,l},l表示脉冲总数,t
r
表示脉冲重复周期,μ表示调频率,表示第m个发射天线在第l个脉冲的载频,m∈{1,2,
…
,m},f
c
表示起始载频,表示第m个发射天线在第l个脉冲的频率调制码字,值的选取可使用rand函数进行确定,δf表示跳频间隔。
[0033]
(3)将成像平面均匀划分为q个大小相同的成像网格,且设目标散射点位于成像网格中心,则目标散射系数表示为β=[β1,β2,
…
,β
q
]
t
,其中{
·
}
t
表示向量转置操作,β
q
表示第q个成像网格中心处的目标散射点的散射系数,q∈{1,2,
…
,q};
[0034]
(4)在第l个脉冲内,接收天线接收到的散射系数为β
q
的目标回波信号为将第l个脉冲内接收到的目标回波信号进行脉冲压缩处理,得到脉压后的目标回波信号s
q
(t
l
);
[0035]
(4.1)在第l个脉冲内,接收天线接收到的散射系数为β
q
的目标回波信号为:
[0036][0037]
其中,表示第m个发射天线的发射信号经过散射系数为β
q
的目标反射后到达接收天线处的时延,r
trans,m
表示第m个发射天线在成像平面中的位置矢量,r
rec,1
表示一个接收天线在成像平面中的位置矢量,r
q
表示
第q个成像网格处的位置矢量,||
·
||表示求范数,c表示光速。
[0038]
(4.2)对第l个脉冲内接收天线接收到的散射系数为β
q
的回波信号进行脉冲压缩操作:
[0039][0040]
其中,*表示转置操作符号,t表示全时间。
[0041]
对上式进行化简,得到回波信号的脉冲压缩结果表达式为:
[0042][0043]
其中,l∈{1,2,
…
,l},sinc(.)表示辛克函数,b表示信号带宽,表示第1个发射天线的发射信号经过散射系数为β
q
的目标反射后到达接收天线处的时延,表示第2个发射天线的发射信号经过散射系数为β
q
的目标反射后到达接收天线处的时延,表示第m个发射天线的发射信号经过散射系数为β
q
的目标反射后到达接收天线处的时延。
[0044]
(5)根据脉压后的目标回波信号s
q
(t
l
),定义成像平面上r
q
处的参考信号s
ref
(t
l
,r
q
),将脉压后的目标回波信号改写为用参考信号表示:s
q
(t
l
)=β
q
s
ref
(t
l
,r
q
);
[0045]
定义成像平面上r
q
处的参考信号为:
[0046][0047]
步骤(4)中的脉压后的目标回波信号s
q
(t
l
)可以进一步写为:
[0048]
s
q
(t
l
)=β
q
s
ref
(t
l
,r
q
)。
[0049]
(6)将第l个脉冲内接收天线接收到的所有q个成像网格内目标的回波信号s(t
l
)用参考信号表示,并将其写成矩阵形式作为目标方程式;
[0050]
根据步骤(5),计算第l个脉冲内接收天线接收到的所有q个成像网格内目标的回波信号s(t
l
):
[0051][0052]
将上式写成矩阵形式:
[0053]
s=s
ref
·
β
[0054]
上式即为目标方程式。
[0055]
其中,s=[s(t1),s(t2),
…
s(t
l
),
…
,s(t
l
)]
t
表示雷达接收天线接收到l个脉冲的总回波信号向量。s
ref
表示参考信号矩阵,其具体形式为:
[0056][0057]
参考信号矩阵s
ref
中的第(l,q)个元素s
ref
(t
l
,r
q
)表示第l个脉冲内r
q
处的参考信号,q∈{1,2,
…
,q},q表示成像网格的数目,l∈{1,2,
…
,l},l表示脉冲总数,t
l
表示慢时间。
[0058]
(7)利用正交匹配追踪算法求解所述目标方程式,得到目标散射系数的估计值即为目标微波关联成像结果。
[0059]
所述正交匹配追踪算法求解过程为:
[0060]
(7.1)初始化残差e0=s,初始化列序号集合=s,初始化列序号集合表示空集,初始化其中s
ref_0
表示按λ0选出的参考信号矩阵s
ref
的列集合,令迭代次数n=1,设定最大迭代次数为k,k=q;
[0061]
(7.2)计算第n次迭代中找到的列序号
[0062]
其中,s
j_n
‑1表示矩阵s
ref_n
‑1的第j列,e
n
‑1表示第n
‑
1次迭代的残差,λ
n
表示第n次迭代中找到的列序号,arg表示当|<e
n
‑1,s
j
>|取最大值时j的取值,| |表示取绝对值操作,< >表示内积操作。
[0063]
(7.3)更新第n次迭代的列序号集合λ
n
=λ
n
‑1∪{λ
n
},其中,λ
n
‑1表示第n
‑
1次迭代的列序号集合,∪表示并集操作。
[0064]
(7.4)按第n次迭代的列序号集合λ
n
选出与其列序号相对应的参考信号矩阵s
ref
的列集合s
ref_n
;
[0065]
(7.5)计算第n次迭代时的目标散射系数向量的估计值
[0066]
(7.6)计算第n次迭代对应的残差值
[0067]
(7.7)令n=n+1;判断当前迭代次数是否满足n≤k,若是,则返回至步骤(7.2),否则,说明正交匹配追踪算法求解过程结束,输出步骤(7.5)的结果。
[0068]
步骤(7.5)中求得的解即为目标微波关联成像结果。
[0069]
仿真实验
[0070]
下面通过仿真实验对本发明的效果做进一步说明。
[0071]
仿真参数如表1所示:
[0072]
表1本发明的仿真参数
[0073]
参数符号参数描述单位数值m阵元数
‑
16f
c
中心频率ghz14
δf跳频间隔mhz9.15b带宽mhz24t
p
脉冲宽度μs30tr脉冲数
‑
32prf脉冲重复频率khz25δr粗分辨单元大小m3.125nrn距离向采样点数
‑
4320target_n目标点数
‑
8q网格数
‑
51
×
51size网格大小m
21[0074]
二.仿真内容
[0075]
在上述仿真参数下,采用本发明基于频率捷变mimo雷达的目标微波关联成像方法,对飞机模型进行仿真,飞机模型如图2所示。实际应用中使用上述具体参数,可使飞机目标被正确成像,结果如图3所示。
[0076]
从图3中可见,飞机模型中的8个散射点均可以被准确、清晰地成像,如图3中的标注所示。
[0077]
以上仿真实验验证了本发明的正确性、有效性和可靠性。
[0078]
虽然,本说明书中已经用一般性说明及具体实施方案对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1