一种飞机机身筒段坠撞试验件称重及重心调整装置与方法与流程
11.(f1+f2)
·
(l
‑
l1)=f3·
l1[0012][0013]
,其中,g为试验件重量,l1为第三吊绳至试验件重心位置的水平横向距离,l为第三吊绳至第一吊绳或第二吊绳的水平横向距离,w1为第二吊绳至试验件重心位置的水平纵向距离,w为第一吊绳至第二吊绳的水平横向距离。
[0014]
优选地,若要使得试验件重心在三个称重传感器吊点的几何中心上,则,
[0015][0016][0017]
f1+f2=f3[0018]
f1=f2[0019][0020]
优选地,所述试验件重心的水平横向距离的偏差
[0021]
所述试验件重心的水平纵向距离的偏差
[0022]
优选地,所述第三吊绳与第二吊绳相对于试验件横向几何重心对称设置,所述第一吊绳和第二吊绳相对于试验件航向几何中心对称设置,所述第四吊绳和第五吊绳相对于试验件航向几何中心对称设置。
[0023]
一种飞机机身筒段坠撞试验件称重及重心调整方法,包括,在吊耳上安装吊绳组件,吊绳组件上设置称重传感器;利用吊装工装和提升机将试验件提升离开地面;调整调节组件,指导试验件的俯仰角和滚转角满足试验误差需求;读取称重传感器的数据,计算试验件的重量;计算试验件的重心,获得重心位置偏差;若试验件的重量和重心位置偏差不满足试验误差需求,则调整试验件配合或舱内装载物的重量和排布方式;重新计算试验件重量和重心位置偏差,若不满足试验误差需求则继续调整试验件直至满足试验要求。
[0024]
本技术的一种飞机机身筒段坠撞试验件称重及重心调整装置,通过设置第一吊绳绳、第二吊绳、第三吊绳形成一个三角形的稳定结构,而后在第三吊绳的下端设置第四吊绳、第五吊绳配合试验件形成另一个三角形稳定结构,将四组调节装置分别设置于第一吊绳、第二吊绳、第四吊绳、第五吊绳上,在进行重心的调节时,由于结构稳定,试验件不会发生晃动,调节也就较为方便。
[0025]
优选地,通过将吊装工装与提升机相连,提升机能够将吊装工装和试验件提起,这种悬空提升的方式对试验件进行重心调节,能够突破场地的限制,适应性更好。
附图说明
[0026]
为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
[0027]
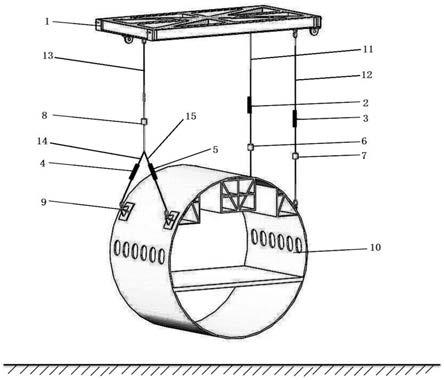
图1为本技术整体结构示意图;
[0028]
图2为本技术整体测力结构示意图。
[0029]
1、吊装工装;2、第一长度调节器;3、第二长度调节器;4、第三长度调节器;5、第四长度调节器;6、第一称重传感器;7、第二称重传感器;8、第三称重传感器;9、吊耳;10、试验件;11、第一吊绳;12、第二吊绳;13、第三吊绳;14、第四吊绳;15、第五吊绳。
具体实施方式
[0030]
为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
[0031]
一种飞机机身筒段坠撞试验件称重及重心调整装置,如图1所示,包括吊装工装1、吊绳组件、调节组件、称重组件、吊耳9。
[0032]
吊装工装1水平设于机身筒段试验件10的正上方,呈矩形结构,并且吊装工装1的长度方向沿着垂直于机身筒段轴向方向。
[0033]
吊绳组件设于吊装工装1与试验件10之间用于提拉试验件10,调节组件用于设于吊绳组件上并用于调整试验件10的重心。
[0034]
吊绳组件包括第一吊绳11、第二吊绳12、第三吊绳13、第四吊绳14和第五吊绳15,第一吊绳11、第二吊绳12和第三吊绳13均竖直设置并且三者的上端与吊装工装1相连,第一吊绳11和第二吊绳12位于吊绳工装的一端,第三吊绳13位于吊绳工装的另一端,第四吊绳14和第五吊绳15连接于第三吊绳13的下端并分别倾斜设置于第一吊绳11的两侧。
[0035]
调节组件分别包括结构相同的第一长度调节器2、第二长度调节器3、第三长度调节器4和第四长度调节器5,第一长度调节器2设于第一吊绳11上,第二长度调节器3设于第二吊绳12上,第三长度调节器4设于第四吊绳14上,第四长度调节器5设于第五吊绳15上。吊耳9设置四组并分别设于第一吊绳11、第二吊绳12、第四吊绳14、第五吊绳15与试验件10之间,用于连接吊绳与试验件10。
[0036]
通过称重组件来对试验件10进行称重,第一吊绳11、第二吊绳12和第三吊绳13形成相互配合,形成三点式吊装,结构稳定,当试验件10的重心发生偏移时,由于第一吊绳11和第二吊绳12竖直设置,第三吊绳13和第四吊绳14分别朝向两个不同的方向倾斜,通过不同吊绳上的调节组件能够调节试验件10的上下和前后位置,也就能够有效调节试验件10的重心位置。
[0037]
更有效地,第一吊绳11、第二吊绳12与第三吊绳13形成三角形结构,第四吊绳14、第五吊绳15与试验件10之间形成另一三角形结构,结构稳定,在调节任意一个调节组件时,其余各部件均不会发生晃动,适应范围广,能够满足各类飞机坠撞试验需求。
[0038]
优选地,吊装工装1与提升机相连,提升机能够拉起吊绳工装和试验件10,实现悬空提升,由于现有技术中采用地秤测量的方式对试验件10的称重和重心调整不便,采用悬空提升的方式来对试验件10进行称重和重心的调整,不需要特定的场地,对测试工装的要求也较低。
[0039]
优选地,调节组件包括第一丝杠、第二丝杠和内螺纹套,第一丝杠、第二丝杠上设置有方向的螺纹,内螺纹套的内部两端螺纹相反并分别与第一丝杠和第二丝杠螺纹配合。对于竖直设置的调节组件,通过正向转动内螺纹套,第一丝杠和第二丝杠相互靠近,能够将试验件10拉起;反向转动内螺纹套,第一丝杠和第二丝杠相互分离,能够使试验件10下降。
对于倾斜设置的调节组件,转动内螺纹套能够同时调节试验件10的上下和前后位置。由于调节组件采用螺纹配合,能够实现对试验件10的高精度调节。
[0040]
调节组件上的第一丝杠和第二丝杠与吊绳通过u型环连接。
[0041]
优选地,调节组件的调整范围为0
‑
300mm。
[0042]
如图1、图2所示,优选地,称重组件包括第一称重传感器6、第二称重传感器7和第三称重传感器8,第一称重传感器6设于第一吊绳11上,第二称重传感器7设于第二吊绳12上,第三称重传感器8设于第三吊绳13上。第一称重传感器6的感应器为f1,第二称重传感器7的感应力为f2,第三称重传感器8的感应力为f3,则
[0043]
g=f1+f2+f3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0044]
(f1+f2)
·
(l
‑
l1)=f3·
l1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0045][0046]
。其中,g为试验件10重量,l1为第三吊绳13至试验件10重心位置的水平横向距离,l为第三吊绳13至第一吊绳11或第二吊绳12的水平横向距离,w1为第二吊绳12至试验件10重心位置的水平纵向距离,w为第一吊绳11和第二吊绳12的水平横向距离。l、w、f1、f2、f3能够测量得出,g、l1、w1通过(1)、(2)、(3)公式能够计算得出,也就能够精准地计算出试验件10的重心位置,以方便进行后续的调节。
[0047]
优选地,若要使得试验件10重心在三个称重传感器吊点的几何中心,则,
[0048][0049][0050]
f1+f2=f3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0051]
f1=f2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0052][0053]
优选地,试验件10重心的水平横向距离的偏差试验件10重心的水平纵向距离的偏差试验件10在出现重心的偏差时,根据得出的偏差值来对试验件10的重心位置进行调节,每个方向上的偏差均需要四个调节组件相互配合进行反复的调节,在调节时,一般先进行水平横向距离的调节,而后进行水平纵向距离的调节。
[0054]
优选地,第三吊绳13与第二吊绳12相对于试验件10横向几何重心对称设置,第一吊绳11和第二吊绳12相对于试验件10航向几何中心对称设置,第四吊绳14和第五吊绳15相对于试验件10横向几何中心对称设置。五组吊绳通过对称布置于试验件10的航向或横向几何重心处,调节更为方便和稳定。
[0055]
作为一种具体实施方式,为一种飞机机身筒段坠撞试验件10称重及重心调整方法,其采用上述中的结构,包括:
[0056]
步骤s100,在吊耳9上安装吊绳组件,吊绳组件上设置称重传感器;
[0057]
步骤s200,利用吊装工装1和提升机将试验件10提升离开地面;
[0058]
步骤s300,调整调节组件,指导试验件10的俯仰角和滚转角满足试验误差需求;
[0059]
步骤s400,读取称重传感器的数据,计算试验件10的重量;
[0060]
步骤s500,计算试验件10的重心,获得重心位置偏差;
[0061]
步骤s600,若试验件10的重量和重心位置偏差不满足试验误差需求,则调整试验件10配合或舱内装载物的重量和排布方式;
[0062]
步骤s700,重新计算试验件10重量和重心位置偏差,若不满足试验误差需求则继续调整试验件10,也即是反复执行步骤s400
‑
s600,直至满足试验要求。
[0063]
采用悬吊的方式布置来保证调节方便,采用丝杠对试验件10的重心进行调节来保证调节精度,适应性广,并且不受场地的限制,能够对多种试验件10进行有效测试。
[0064]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1