一种推算正高值定律的制作方法
1.本发明涉及正高技术领域,具体为一种推算正高值定律。
背景技术:
2.正高是以大地水准面为基准的高程,即地面点到大地水准面的铅垂距离,又称为绝对高程或者海拔,地面点沿铅垂线到似大地水准面的距离称为正常高,以似大地水准面定义的高程系统成为正常高系统,正常高与正高的差值与正常重力等参数有一定关系。
3.鉴于自然地球体陆地表面上,用水准测量测定短距离相互通视的任意两点间高差,则《
△
h》在一般情况下,是非原理性、非科学性、非正确性的,其原因在于水准测量任意两点处的两根铅垂线,一般情况下不在同一平面上,且一般情况下两根重力线不平行。
技术实现要素:
4.本发明的目的在于提供一种推算正高值定律,以解决上述背景技术中提出现有在于水准测量任意两点处的两根铅垂线,一般情况下不在同一平面上,且一般情况下两根重力线不平行的问题。
5.为实现上述目的,本发明提供如下技术方案:一种推算正高值定律,包括以下论证,包括步骤如下:
6.步骤1:选取陆地表面任意一点p
i
;
7.步骤2:h
重
的确定:针对p
i
找到大地体重力等位面与大天体重力等位面之间对应点的重力矢量线的长度;
8.步骤3:距离b的确定:p
i
到导航卫星a的真实距离r
pi
乘以r
pi
与步骤2中所述重力矢量线夹角的余弦值;
9.步骤4:用步骤2中的h
重
减去距离b的值即为正高值。
10.通过采用上述技术方案,在基于现有的知识上对正高定律进行重新定义,使水准测量任意两点在同一平面,两根重力线平行。
11.进一步地,所述真实知识包含地形起伏和水、陆分布,所述地形起伏为最高点的珠穆朗玛峰高达8844.43m,最低点是玛利亚纳海沟深达11022m,所述水、陆分布为海洋面积约占70%,陆地面积约占29%,自然地球体类似水球。
12.通过采用上述技术方案,以上为现有已知公开内容,作为本发明的推算正高值定律的基础。
13.进一步地,所述推究知识包含水准面、大地水准面、大地体、大地体引力等位面和大地体重力等位面,所述水准面为自然地球体类似水球,所以可把自然球体看作是被海水包围的球体,所述大地水准面静止的水准面与平均海水重合的大地水准是一个无波浪、无潮汐、无水流、无大气压变化,处于流体平衡状态的曲面。
14.通过采用上述技术方案,此为自然地球体的推究知识,是现在已知知识,水准面中假设一个静止的海水面向大陆延伸形成一个封闭的曲面,这个静止的封闭曲面就称之为水
准面,而大地水准面则是因为有无数个,所以其中必定有一个水面与平均海水重合,因而该水准面称之为大地水准面,大地水准面仍不是一个规则的曲面,。
15.进一步地,所述大地体则是大地水准面所包围的球体称之为大地体,所述大地体引力等位面为指静态大体表面就是大地体引力等位面,所述大地体重力等位面为动态大地体表面就是大地体重力等位面。
16.通过采用上述技术方案,将大地体的自然环境进行分为水准面、大地水准面、大地体、大地体引力等位面和大地体重力等位面。
17.进一步地,所述推究知识包含大天体、大天体引力等位面、大天体重力等位面、动态、大地体和大天体之间相对应点的引力矢量线等长、大地体和大天体之间相对应点的重力矢量线等长与l
引
、h
重
。
18.通过采用上述技术方案,对大地体和大天体之间的关系进行推究。
19.进一步地,所述大天体是指任何类型的人造卫星在不同高度绕自然地球体以固定轨道运行,所述大天体为静态大天体表面就是大天体引力等位面,所述大天体重力等位面为动态大天体表面就是大天体重力等位面,所述动态为地球进行运动状态,所述动态是该点离心反延长线与地轴相垂直的离心力正方向线和该点的地球引力方向线之合力,所述动态是该点离心反延长线与天轴相垂直的离心力正方向线和该点的地球引力方向线之合力,所述合力为零,所述大地体和大天体之间相对应点的引力矢量线等长中引力矢量线长为常量,所述常量设l
引
为代号。
20.通过采用上述技术方案,大天体若有无数个同一类型的人造卫星,以互相不重叠的轨道绕大地体运行,若令自然地球体停止运动,此时无数条运行轨道构成的天球就是大天体,因此大天体与大地体之间绝对同步,大地体和大天体表面的起伏是及其微小的,若与gps系统中人造卫星平均高度20183km相比,更是极其微小的,因此如图2所示将常量设l
引
为代号。
21.进一步地,所述大地体、大天体表面任意一点的离心力均为等大,所述大地体、大天体之间相对应点的引力矢量线等长,所述该矢量线等长为常量设h
重
为代号。
22.通过采用上述技术方案,如图3所示《大地体重力等位面》与《大天体重力等位面》之间重力矢量线等长,其中l
引
和h
重
可通过推究和计算进行获取。
23.进一步地,所述推算正高值定律公式为h
pi
=h
重
‑
r
pi
cos
∝
pi
。
24.通过采用上述技术方案,陆地表面任意一点p
i
正高值等于《大地体重力等位面》与《大天体重力等位面》之间相对应点的重力矢量线(h
重
)剪去p
i
至导航定位卫星的真距乘以rp
i
距与h
重
与夹角(
∝
p
i
)的余弦函数值。
25.与现有技术相比,本发明的有益效果是:
26.1、该推算正高值定律,通过对自然地球体之真实知识和推究知识为基础,将大地体的自然环境进行分为水准面、大地水准面、大地体、大地体引力等位面和大地体重力等位面,大天体若有无数个同一类型的人造卫星,以互相不重叠的轨道绕大地体运行,若令自然地球体停止运动,此时无数条运行轨道构成的天球就是大天体,因此大天体与大地体之间绝对同步,大地体和大天体表面的起伏是及其微小的,若与gps系统中人造卫星平均高度20183km相比,更是极其微小的,因此如图2所示将常量设l
引
为代号,如图3所示《大地体重力等位面》与《大天体重力等位面》之间重力矢量线等长,其中l
引
和h
重
可通过推究和计算进行
获取,为获取两根重力线平行提供条件。
27.2、该推算正高值定律,通过将陆地表面任意一点p
i
正高值等于《大地体重力等位面》与《大天体重力等位面》之间相对应点的重力矢量线(h
重
)减去p
i
至导航定位卫星的真距乘以rp
i
距与h
重
与夹角(
∝
p
i
)的余弦函数值,由此得到推算正高值定律。
附图说明
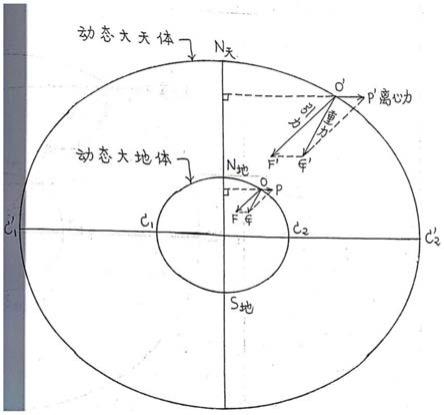
28.图1为本发明的动态大地体、大天体表面上任意一点的离心力、引力、重力示意图;
29.图2为本发明的《大地体引力等位图》与《大天体引力等位图》之间引力矢量线等长示意图;
30.图3为本发明的《大地体重力等位面》与《大天体重力等位图》之间重力矢量线等长示意图;
31.图4为本发明的《张慎佳之推算正高值定律》示意图。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
33.请参阅图1
‑
4,本发明提供的一种实施例:一种推算正高值定律,包括步骤如下:
34.步骤1:选取陆地表面任意一点p
i
;
35.步骤2:h
重
的确定:针对p
i
找到大地体重力等位面与大天体重力等位面之间对应点的重力矢量线的长度;
36.步骤3:距离b的确定:p
i
到导航卫星a的真实距离r
pi
乘以r
pi
与步骤2中所述重力矢量线夹角的余弦值;
37.步骤4:用步骤2中的h
重
减去距离b的值即为正高值。
38.所述真实知识包含地形起伏和水、陆分布,所述地形起伏为最高点的珠穆朗玛峰高达8844.43m,最低点是玛利亚纳海沟深达11022m,所述水、陆分布为海洋面积约占70%,陆地面积约占29%,自然地球体类似水球,所述推究知识包含水准面、大地水准面、大地体、大地体引力等位面和大地体重力等位面,所述水准面为自然地球体类似水球,所以可把自然球体看作是被海水包围的球体,所述大地水准面静止的水准面与平均海水重合的大地水准是一个无波浪、无潮汐、无水流、无大气压变化,处于流体平衡状态的曲面,所述大地体则是大地水准面所包围的球体称之为大地体,所述大地体引力等位面为指静态大体表面就是大地体引力等位面,所述大地体重力等位面为动态大地体表面就是大地体重力等位面,所述推究知识包含大天体、大天体引力等位面、大天体重力等位面、动态、大地体和大天体之间相对应点的引力矢量线等长、大地体和大天体之间相对应点的重力矢量线等长与l
引
、h
重
,所述大天体是指任何类型的人造卫星在不同高度绕自然地球体以固定轨道运行,所述大天体为静态大天体表面就是大天体引力等位面,所述大天体重力等位面为动态大天体表面就是大天体重力等位面,所述动态为地球进行运动状态,所述动态是该点离心反延长线与地轴相垂直的离心力正方向线和该点的地球引力方向线之合力,所述动态是该点离心反延长线与天轴相垂直的离心力正方向线和该点的地球引力方向线之合力,所述合力为零,所述大地体和大天体之间相对应点的引力矢量线等长中引力矢量线长为常量,所述常量设l
引
为
代号,所述大地体、大天体表面任意一点的离心力均为等大,所述大地体、大天体之间相对应点的引力矢量线等长,所述该矢量线等长为常量设h
重
为代号,所述推算正高值定律公式为h
pi
=h
重
‑
r
pi
cos
∝
pi
,通过已知的自然地球体之真实知识为基础进行自然地球体之推究知识,再进行大地体和大天体之间推究知识,基于以上条件和基础进行推算正高值定律。
39.工作原理:首先通过已知的地形起伏和水、路分布,以自然地球体的真实知识为准对自然地球体进行推究,推究分为水准面、大地水准面、大地体、大地体引力等位面和大地体重力等位面,水准面是指静止的封闭曲面,大地水准面则是指无数个水准面中其中一个水准面与平均海水面的重合,大地水准面仍然不是一个规则的曲面,其原因是当海平面静止时,自由水面必须与该面上各店的地球引力线方向相互正交,地球内部质量不均匀,造成地球引力大小不规则分布,导致处于地球引力线方向相互正交的大地水准面是一个起伏不平的引力等位面,大地水准面所包围的球体称之为大地体,大地体引力等位面是指静态地球停止运动的状态下大地体表面就是大地体引力等位面,大地体重力等位面是指地球进行运动状态下的大地体表面就是大地体重力等位面,随后进行大地体、大天体之间的推究为解决水准测量任意两点处的两根铅垂线不在同一平面上,且两根重力线不平行的问题进行提供有利价值,推究分为大天体、大天体引力等位面、大天体重力等位面、动态分类、大地体、大天体之间相对应的引力矢量线等长和大地体、大天体之间相对应点的重力矢量线等长,先证明大天体与大地体之间的绝对同步,地球进行运动状态下大地体表面任意一点的重力如图1所示,该点离心力反延长线与地轴相垂直的离心力正方向线和该点的地球引力方向线之合力,动态是该点离心反延长线与天轴相垂直的离心力正方向线和该点的地球引力方向线之合力,合力为零,由于大地体和大天体表面的起伏是及其微小的,若与gps系统中人造卫星平均高度20183km相比,更是极其微小的,因此如图2所示将常量设l
引
为代号,如图3所示《大地体重力等位面》与《大天体重力等位面》之间重力矢量线等长,其中l
引
和h
重
可通过推究和计算进行获取,为获取两根重力线平行提供条件,当基本条件满足后通过推算正高值定律公式来进行推算,其定律将陆地表面任意一点p
i
正高值等于《大地体重力等位面》与《大天体重力等位面》之间相对应点的重力矢量线(h
重
)减去p
i
至导航定位卫星的真距乘以rp
i
距与h
重
与夹角(
∝
p
i
)的余弦函数值。
40.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1