一种光纤航姿单元及测试工装的制作方法
1.本发明涉及飞机航电系统技术领域,特别是涉及一种集成磁航向传感器的光纤航姿单元及测试工装,实现单一lru精准航向、姿态输出。
背景技术:
2.光纤航姿测量单元通过与基座直接固联的三个闭环光纤陀螺和三个石英加速度计分别测量机体的角速率和加速度,然后通过“数学平台”实时解算出载机的航向、俯仰和倾斜角。
3.高精度光纤航姿测量单元不借助外部航向基准的情况下,可通过自对准实现精准航向输出,但长时间航向精度无法保证,同时受限于内部传感器,存在成本高、体积重量大的问题。小型中等精度和低精度光纤航姿测量单元无法通过自对准实现精准航向输出,需配套磁航向传感器获得初始航向,长时间使用时通过磁航向修正产品航向,保证长期的航向精度。然而,目前的光纤航姿测量单元内部结构布局不够合理,内部电子元器件形成对磁航向传感器的干扰,影响了航向精度。
技术实现要素:
4.为了解决上述问题,本发明提供一种光纤航姿单元及测试工装,本技术中,将磁航向传感器和光纤航姿测量单元进行集成设计,将磁航向传感器安装在光纤航姿测量单元的内部,通过空间校准技术和优化结构布局消除产品内部电子器件对磁航向传感器的干扰,实现单一lru长期精准航向、姿态输出。
5.本发明所采用的技术方案为:一种光纤航姿单元,包括:箱体,所述箱体顶部为开口且箱体的侧壁上设有安装口;上盖板,所述上盖板设于所述箱体的顶部开口处;磁航向传感器,位于所述箱体内且设于所述上盖板上;前盖板组件,设于所述安装口处;电路板组件和惯性仪表组件,均设于所述箱体内。
6.作为一种可选的技术方案,所述上盖板上还设有四个安装凸台,所述磁航向传感器通过防磁螺钉设于所述安装凸台上,所述磁航向传感器与安装凸台之间设有绝缘防磁垫片。
7.作为一种可选的技术方案,所述前盖板组件包含dc/dc转换器和前盖板,所述dc/dc转换器通过螺钉设于所述前盖板上。
8.作为一种可选的技术方案,所述电路板组件包括母板电路板以及设于所述母板电路板上的电源电路板和航姿解算板,所述母板电路板通过螺钉紧固在所述箱体的底部,电源电路板和航姿解算板相互平行设置。
9.作为一种可选的技术方案,所述惯性仪表组件包括仪表支架、光纤陀螺仪和加速度计,所述仪表支架上设有安装板和安装座,所述光纤陀螺仪和加速度计分别设于所述安
装板和安装座上。
10.作为一种可选的技术方案,所述安装板设有三个,三个所述安装板相互垂直,每一所述安装板上均设有所述的光纤陀螺仪;所述安装座设有三个,三个所述安装座的对称轴相互垂直,每一所述安装座内均安装有所述的加速度计。
11.本发明还公开了一种测试工装,包括工装外壳,所述工装外壳内设有用于安装如上述的光纤航姿单元的安装腔,所述工装外壳为多面体结构,每一面上均具有不同于其它面的符号标识。
12.作为一种可选的技术方案,所述工装外壳为12面
‑
18面体结构中的任一一种多面体结构。
13.作为一种可选的技术方案,所述符号标识为连续的数字符号或字母符号。
14.本发明的有益效果为:本技术中,将磁航向传感器和光纤航姿测量单元进行集成设计,将磁航向传感器安装在产品内部,通过优化结构布局、空间校准技术消除产品内部电子器件对磁航向传感器的干扰,实现单一lru长期精准航向、姿态输出,整体结构紧凑,布局合理,有利于缩小体积。
附图说明
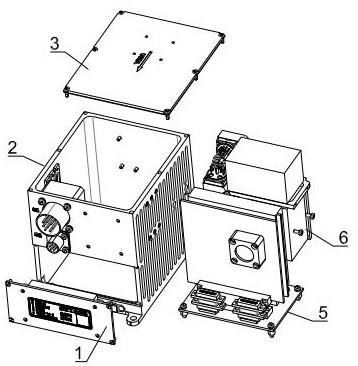
15.图1 为光纤航姿单元的爆炸图;图2 为图1中上盖板的仰视图;图3 为前盖板组件装配结构示意图;图4 为电路板组件装配结构示意图;图5 为惯性仪表组件装配结构示意图;图6是仪表支架的结构示意图;图7是测试工装的结构示意图。
具体实施方式
16.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.下面结合附图及具体实施例对本发明作进一步阐述。
实施例
18.如图1所示,一种光纤航姿单元,包括:箱体2,所述箱体2顶部为开口且箱体2的侧壁上设有安装口;上盖板3,所述上盖板3设于所述箱体2的顶部开口处;磁航向传感器4,位于所述箱体2内且设于所述上盖板3上;
前盖板组件1,设于所述安装口处;电路板组件5和惯性仪表组件6,均设于所述箱体2内。
19.作为一种可选的实施方式,如图2所示,所述上盖板3上还设有四个安装凸台8,所述磁航向传感器4通过防磁螺钉7设于所述安装凸台8上,飞行方向与航姿测量单元飞行方向一致,所述磁航向传感器4与安装凸台8之间设有绝缘防磁垫片9。
20.作为一种可选的实施方式,如图3所示,所述前盖板组件1包含dc/dc转换器101和前盖板102,所述dc/dc转换器101通过螺钉设于所述前盖板102上。
21.作为一种可选的实施方式,如图4所示,所述电路板组件5包括母板电路板501以及设于所述母板电路板501上的电源电路板502和航姿解算板503,所述母板电路板501通过螺钉紧固在所述箱体2的底部,电源电路板502和航姿解算板503相互平行设置。
22.作为一种可选的实施方式,如图5和图6所示,所述惯性仪表组件6包括仪表支架601、光纤陀螺仪602和加速度计603,所述仪表支架601上设有安装板604和安装座605,所述光纤陀螺仪602和加速度计603分别设于所述安装板604和安装座605上。
23.作为一种可选的实施方式,所述安装板604设有三个,三个所述安装板604相互垂直,每一所述安装板604上均设有所述的光纤陀螺仪602;所述安装座605设有三个,三个所述安装座605的对称轴相互垂直,每一所述安装座605内均安装有所述的加速度计603。
24.本实施例中,磁航向传感器4具备空间校准功能,配合电路板组件5,通过测试计算机,进行16位置空间校准(最少支持12位置,最多支持18位置),消除产品内部电子器件对磁航向传感器的干扰,实现磁航向精确输出。
25.在本实施例中,进行空间校准时,需将磁航向传感器5固定安装在航姿单元内部进行相应的校准。校准方式如下:产品校准时,选择开阔干扰小的环境,周边3m范围内无大型铁磁性物质。
26.产品连接测试计算机,水平放置,航向方向0度,上电后监测产品输出正常。
27.在测试计算机页面输入空间校准指令,进入空间校准页面,此时页面提示采集第一个位置下姿态数据,大约2秒后,提示完成第一个位置数据采集,进入第二个位置采集,此时将产品按第二个位置要求进行摆放。
28.依次采集16个位置数据后,产品测试计算机端自动输出标定结果,标定应小于等于3,标定后重新启动产品,正常输出后,每隔45度移动产品航向变化,检查产品磁航向输出与基准磁航向输出误差应小于等于1
°
。不满足要求时需重新进行标定。
29.注:数据采集对摆放的各个角度没有特别严格的限定,误差在
±
15
°
以内均可接受。各位置摆放角度如下所示:位置1:产品水平放置,航向角0
°
;位置2:产品水平放置,航向角90
°
;位置3:产品水平放置,航向角180
°
;位置4:产品水平放置,航向角270
°
;位置5:产品左侧顶角1靠底保持45
°
直立(航向任意、俯仰45
°
、横滚45
°
);位置6:产品左侧顶角2靠底保持45
°
直立(航向任意、俯仰45
°
、横滚
‑
45
°
);位置7:产品左侧顶角3靠底保持45
°
直立(航向任意、俯仰45
°
、横滚135
°
);位置8:产品左侧顶角4靠底保持45
°
直立(航向任意、俯仰45
°
、横滚
‑
135
°
);
位置9:产品右侧顶角1靠底保持45
°
直立(航向任意、俯仰
‑
45
°
、横滚45
°
);位置10:产品右侧顶角2靠底保持45
°
直立(航向任意、俯仰
‑
45
°
、横滚
‑
45
°
);位置11:产品右侧顶角3靠底保持45
°
直立(航向任意、俯仰
‑
45
°
、横滚135
°
);位置12:产品右侧顶角4靠底保持45
°
直立(航向任意、俯仰
‑
45
°
、横滚
‑
135
°
);位置13:产品底边1靠底保持45
°
直立(航向0
°
、俯仰45
°
、横滚0
°
);位置14:产品底边2靠底保持45
°
直立(航向0
°
、俯仰
‑
45
°
、横滚0
°
);位置15:产品底边3靠底保持45
°
直立(航向0
°
、俯仰0
°
、横滚45
°
);位置16:产品底边4靠底保持45
°
直立(航向0
°
、俯仰0
°
、横滚
‑
45
°
)。
30.以上给出了空间校准时需摆放的16种姿态,但从使用角度来看,校准采集数据所花的时间越少越好,但使用空间校准方法最少需要采集12种姿态下的数据,本产品选用的磁航向传感器最多支持18位置。
31.为了便于高效的采集以上规定姿态下的数据,专门设计了一种多面体测试工装,如图7所示,包括工装外壳10,所述工装外壳10内设有用于安装如上述的光纤航姿单元的安装腔,所述工装外壳10为多面体结构,每一面上均具有不同于其它面的符号标识。
32.作为一种可选的实施方式,所述工装外壳10为12面
‑
18面体结构中的任一一种多面体结构。
33.作为一种可选的实施方式,所述符号标识为连续的数字符号或字母符号。
34.使用时,将产品固定安装在工装外壳10的安装腔内,多面体各个表面均标注有对应的编号,只需按编号摆放这些姿态分别采集数据即可完成校准。标注这些编号的作用是为了不遗漏或者重复采集某个姿态下的数据,因此利用此多面体进行校准时,建议按照所标注的编号摆放姿态采集数据。如果安装磁航向传感器的用户设备较小,可以专门设计一型专用的多面体测试工装,以供客户快速完成校准。
35.采用测试工装可大大提高校准效率,利用此测试工装,整个校准过程仅需2到3分钟,校准时,除了这个便于快速摆放稳定姿态的多面体工装和用于发送相关指令的计算机以外,不需要其他辅助设备,使用非常方便。
36.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内,凡是落入本发明权利要求界定范围内的技术方案,均落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1