一种雷达信噪比估计方法
1.本发明属于雷达成像技术领域,具体涉及雷达成像中的信噪比估计方法。
背景技术:
2.信噪比是扫描雷达成像与探测的重要参数之一,是衡量干扰机的干扰性能或者雷达本身 的抗干扰性能的一个重要参量;在扫描雷达目标探测中,信噪比影响着目标探测概率;在雷 达成像中,信噪比影响着各种成像算法的性能以及最优参数的选取。因此在雷达信号处理中, 通常需要对信噪比进行估计。
3.最早测量雷达信噪比的方法是从视频端进行人工测量,但是这取决于于雷达操作手的判 读经验和水平,并且难以实现自适应估计。针对信噪比估计,特别是基于信号处理的自适应 估计问题,文献“moment
‑
based snr estimation over linearly
‑
modulated wireless simochannels”(wireless communications,ieee transactions on,2010,pp.714
‑
722)中根据信号和 噪声的统计特性的不同,通过构造二阶以及四阶矩来区分信号和噪声,然而这种方法高度依 赖于大量快拍。在雷达信号处理中,尤其是运动平台下,波束驻留时间较短,无法形成大快 拍数的积累,因此这种方法不适合雷达信号处理。文献“non
‑
data
‑
aided signal
‑
to
‑
noise
‑
ratioestimation”(communications,2002.icc 2002.ieee international conference on,2002, pp.197
‑
201)中采用最大似然估计器估计噪声方差以及信号功率。在数据辅助条件下,ml类 算法是最优的;但在没有数据辅助时,其估计效果在高信噪比下较好,但在低信噪比下由于 判决误差影响,其性能很差。
技术实现要素:
4.针对现有技术存在的上述问题,本发明提出了一种雷达信噪比估计方法。
5.本发明的具体技术方案为:一种雷达信噪比估计方法,具体包括如下步骤:
6.步骤1.定义s=[s1,s2,...,s
k
]为同一波束范围内的目标分布,其中,k为目标个数;定 义h=[h1,h2,...,h
l
]
t
为雷达发射信号,其中,l为发送序列长度;令雷达接收信号为y, 其中,e为噪声信号,所述雷达接收信号y序列长度为m;
[0007]
根据雷达发射信号h构造m
×
k大小卷积矩阵:
[0008]
构造信号
‑
噪声操纵矩阵:a
′
=[a i],令a
k
为矩阵a
′
的第k列,其中,k=1,...,k+m;
[0009]
由所述雷达接收信号y构造其自相关矩阵:初始化 r=i,其中,i是m维单位矩阵,(
·
)
h
表示共轭转置运算;
[0010]
构造协方差矩阵p:
[0011][0012]
由最小二乘法得到s
k
的估计:其中,s
k
为目标分布,p
k
为目标功率。
[0013]
步骤2.为了求得p
k
,构造函数由于p
k
的收敛性, 进一步变换为:
[0014][0015]
步骤3.构造矩阵q,使得q
h
a=i,令q=par
‑1,β=qy=par
‑1y;
[0016]
步骤4.根据步骤3,式(1)转换为:
[0017][0018]
步骤5.对式(2)进行求解,得到p
k
:
[0019][0020]
其中,ρ(i)为设定的迭代算子,具体为:
[0021][0022]
步骤6.根据预先设定的迭代n次数,得到自相关矩阵r的最终估计:
[0023][0024]
步骤7.计算噪声功率的估计值:进而计算信噪比估计值: 其中,p
s
为雷达回波信号功率。
[0025]
本发明的有益效果:本发明的信噪比估计方法通过迭代方式得到雷达接收信号的自相 关矩阵,然后通过特征分解,对噪声子空间进行分离,利用噪声特征值进行噪声方差功率 估计,最后再根据信号功率得到信噪比估计。与已有方法相比,本发明的方法能够根据一 次信号样本,通过迭代方式获得信号的自相关矩阵,该方法不依赖于快拍数量,在单次样 本情况下具有更高的估计精度;对任意输入信号该方法都能自适应的得到信噪比估计,因 而可以准确的估计信噪比。
附图说明
[0026]
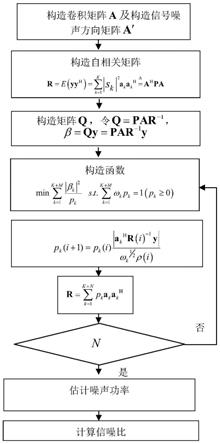
图1为本发明实施例的信噪比估计方法流程示意图;
[0027]
图2为本发明实施例的目标分布示意图;
[0028]
图3为本发明实施例的发射信号示意图;
[0029]
图4为本发明实施例的雷达接收到的回波示意图;
[0030]
图5为本发明实施例的匹配滤波后的回波示意图;
[0031]
图6为本发明实施例的在不同信噪比下的信噪比估计值示意图;
[0032]
图7为本发明实施例的在不同信噪比下的归一化均方根误差示意图。
具体实施方式
[0033]
下面结合附图对本发明的实施例做进一步的说明。
[0034]
(1)设雷达发射信号为带宽b=50mhz,时宽t=2μs的线性调频信号,如图3所示 其具体表达式为
[0035][0036]
其中,k=b/t为线性调频斜率,f
c
为载频,t为距离向时间;假设在同一方位上,归 一化幅值分别为0.5和1的两个点目标s1和s2分别位于距雷达r1=1000m和r2=1100m两个 位置,目标分布如图2所示,那么这些目标的回波经过相干解调后可以表示为:
[0037][0038]
另设采样率f
s
=1.2b,则发射信号h(t)长度l=120,接收信号y(t)长度m=162,由 此可知场景采样点数k=m
‑
l+1=43。接收信号中混入高斯白噪声,这里信噪比设为0db, 则理论上匹配滤波后信噪比提高bt=100倍,即提高至20db。
[0039]
本实施方式的具体估计方法具体流程如图1所示,包括如下步骤:
[0040]
a.首先根据发射信号h(t)构造方向矩阵a:
[0041]
首先根据h(t)构造矩阵a的第一行和第一列,再根据a的toeplitz性质即可得到a; 构造信号
‑
噪声操纵矩阵:
[0042]
a
′
=[a i]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0043]
b.初始化自相关矩阵r为单位矩阵i;
[0044]
c.由s、h得到雷达回波信号的表达式
[0045][0046]
其中,e为噪声信号。
[0047]
由雷达回波信号y构造其自相关矩阵:
[0048][0049]
d.根据步骤a,b,构造协方差矩阵p:
[0050][0051]
由最小二乘法得到s
k
的估计:
[0052][0053]
e.根据步骤a、b、c,为了求得p
k
,构造函数:
[0054][0055]
由于p
k
的收敛性,可进一步将式(13)变换为:
[0056][0057]
f.构造矩阵q,使得q
h
a=i,令q=par
‑1[0058]
β=qy=par
‑1y
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0059]
g.根据上述步骤f,式(14)可以转换为:
[0060][0061]
h.对式(16)进行求解,得到p
k
:
[0062][0063]
其中,ρ(i)为设定的迭代算子,具体为:
[0064][0065]
i.重复步骤h指定迭代n次数,得到自相关矩阵r的最终估计
[0066][0067]
j.对r进行特征分解,得到特征值λ1,λ2,...,λ
m
[0068]
k.对λ1,λ2,...,λ
m
进行排序为λ1,λ2,...,λ
m
,这里的大特征值个数为x=30。根据其
余 的小特征值,对噪声功率进行如下估计。
[0069]
计算噪声功率的估计值:
[0070][0071]
l.图4给出了雷达接收到的回波示意图,图5给出了匹配滤波后的回波示意图。
[0072]
计算匹配滤波后信噪比估计值:
[0073][0074]
其中,p
y
=1.829w为接收信号y(t)的平均功率。
[0075]
(2)保持其他参数不变,信噪比在0db~30db变化,则本发明方法的信噪比估计值如图 6所示;图7则给出了100次蒙特卡罗实验下,不同信噪比下的归一化均方根误差,其中归 一化均方根误差定义为:
[0076][0077]
其中,s表示蒙特卡罗实验次数,μ代表真值,代表第i次实验下的估计值。
[0078]
通过上述实施例可以看出,本发明的方法能够根据一次信号样本,通过迭代方式获得信号 的自相关矩阵,该方法不依赖于快拍数量,在单次样本情况下具有更高的估计精度;对任意 输入信号该方法都能自适应的得到信噪比估计,因而可以准确的估计信噪比。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1