一种基于目标三状态建模的遮挡目标多帧跟踪方法
1.本发明属于目标自动跟踪领域,具体涉及一种基于目标三状态建模的遮挡目标多帧跟踪方法。
背景技术:
2.多帧自动跟踪方法被广泛应用于目标自动跟踪领域中,在跟踪过程中会保存每一时刻每条航迹每个关联假设的历史信息,不断通过后续观测信息来加强前期关联假设的可信度。现有的综合航迹分裂(integrated track splitting:its)就是通过保留历史航迹,形成航迹分量树的方式以减少虚假航迹的出现,同时引入航迹存在概率(probability of target existence:pte)进行航迹管理,实现目标的自动跟踪。因此,在高目标漏检、密集杂波的复杂环境下,its在航迹维持、虚假航迹剔除等方面均优于传统的单帧自动跟踪方法。然而当目标被遮挡时,现有的its由于未对目标存在但不可观测的状态进行建模,导致其在目标遮挡区域的跟踪性能急剧恶化。现有的基于马尔可夫二链的综合概率数据关联(integrated probabilistic data association-markov chain 2:ipda-mc2)是处理遮挡目标跟踪的一种有效的单帧自动跟踪方法,然而目标处于长时间遮挡时,其跟踪的鲁棒性会急剧下降。如何提升遮挡目标跟踪性能的鲁棒性,是本发明要解决的主要问题。
技术实现要素:
3.本发明针对现有技术的不足,提出了一种基于目标三状态建模的遮挡目标多帧跟踪方法。
4.本发明一种基于目标三状态建模的遮挡目标多帧跟踪方法,具体包括以下步骤:
5.(1)k时刻的输入:
6.传感器产生的量测集yk;
7.目标存在可见概率
8.目标存在不可见概率
9.目标不存在概率
10.对于每个航迹分量c
k-1
:相对概率p(c
k-1
);均值协方差p
k-1|k-1
(c
k-1
);各航迹分量目标存在可见概率各航迹分量目标存在但不可见概率
11.其中表示k-1时刻目标存在且可见,表示k-1时刻目标存在但不可见,
12.(2)k时刻,目标航迹的存在概率预测;
[0013][0014]
表示k-1时刻航迹目标不存在概率;
[0015]
其中,m为目标三状态状态转移矩阵;表示目标k时刻不存在;
[0016][0017]
(3)k时刻,目标航迹的航迹分量c
k-1
存在概率预测;
[0018][0019][0020]
其中,m
′
为航迹分量的三状态状态转移矩阵,目标的三状态状态转移矩阵与航迹分量的三状态状态转移矩阵取值相同;
[0021]
航迹分量c
k-1
存在概率预测,采用标准的卡尔曼滤波预测;
[0022][0023]
kf
p
表示标准的卡尔曼滤波预测,具体公式如下:
[0024][0025]
p
k|k-1
(c
k-1
)=fp
k-1|k-1
(c
k-1
)f
t
+q
[0026]
f表示k时刻目标状态转移矩阵,q为目标运动过程噪声误差协方差矩阵;
[0027]
(4)观测选择
[0028]
通过下式,计算得到k时刻各个航迹分量c
k-1
量测预测的均值以及新息协方差sk(c
k-1
);
[0029][0030][0031]
sk(c
k-1
)=h*p
k|k-1
(c
k-1
)*h
′
+r;
[0032]
h为量测转移矩阵,r为传感器误差协方差矩阵;
[0033]
卡尔曼增益k(c
k-1
):
[0034]
k(c
k-1
)=p
k|k-1
(c
k-1
)hs
k-1
(c
k-1
)
[0035]
目标航迹分量c
k-1
进行观测选择,选择准则如下:
[0036][0037]
其中,为波门大小,取决于波门概率pg的大小,整理所有航迹分量的预选观测得
到预选观测集合
[0038][0039]
(5)似然值计算
[0040]
计算各个航迹分量的似然值pk(i,c
k-1
):
[0041][0042]
计算目标航迹的似然值pk(i):
[0043][0044]
(6)目标航迹状态更新
[0045]
计算似然比:
[0046][0047]
其中,ρk为杂波密度,pd表示传感器检测概率,mk为量测落入门限的个数;令δk=pdpg;当mk=0时,即没有量测落入门限,则λk=1-δk;
[0048]
目标存在概率p(χk|yk)更新:
[0049][0050]
关联概率的计算:
[0051]
目标存在且可见关联概率:
[0052][0053]
其中,i表示量测落入门限的第i个量测,i=0时,即没有量测落入门限。
[0054]
目标存在但不可见关联概率:
[0055][0056]
暂时航迹分量建立,令暂时航迹分量
[0057]
航迹分量第i个目标存在且可见概率:
[0058][0059]
航迹分量第i个目标存在但不可见概率:
[0060]
[0061]
航迹分量动力学状态的更新:
[0062][0063]
i=0航迹分量不进行更新,航迹分量的状态值等于航迹分量的预测值;
[0064][0065][0066][0067]
i>0,航迹分量状态进行卡尔曼滤波更新:
[0068][0069][0070]
i表示4*4单位矩阵;
[0071]
(7)航迹分量管理
[0072]
计算航迹分量相对概率
[0073][0074]
设置裁剪门限τc,对相对概率的航迹分量进行裁剪;根据进行裁剪后得到新的航迹分量ck′
;
[0075][0076]
对裁剪后的航迹分量ck′
进行归一化,得到k时刻的航迹分量ck的相对概率p(ck)、均值协方差p
k|k
(ck)、存在且可见概率以及存在但不可见概率
[0077][0078][0079]
p
k|k
(ck)=p
k|k
(ck′
)
[0080][0081][0082]
整理得到k时刻的航迹分量ck:
[0083][0084]
(8)目标动力学状态输出:
[0085]
k时刻目标存在且可见概率更新:
[0086][0087]
k时刻目标存在但不可见概率更新:
[0088][0089]
k时刻目标动力学状态输出:
[0090][0091][0092][0093]
重复(1)~(8)进行时域迭代计算,最终获取各个时刻目标动力学状态估计。
[0094]
作为优选,所述传感器产生的量测集yk为起始时刻到k时刻的所有量测集,即
[0095]
yk={y
k-1
,yk}
[0096]
k时刻的量测集yk由下式得到:
[0097]
yk=hxk+wk[0098]
其中仿真中pd取值0.9,h为量测转移矩阵,传感器的测量形式是线性的,测量噪声wk为零均值、协方差为r的高斯白噪声;xk表示k时刻目标动力学状态;目标不存在或者目标被遮挡时,那么传感器无法探测到目标量测。
[0099]
作为优选,所述的k时刻目标动力学状态xk得表达式为:
[0100]
xk=fx
k-1
+vk[0101]
其中,其中,分别表示目标在二维笛卡尔坐标系中x、y方向上的位置、速度状态信息;f表示k时刻目标状态转移矩阵;vk为零均值、协方差为q的高斯白噪声,q为目标运动过程噪声误差协方差矩阵。
[0102]
4、根据权利要求1所述的一种基于目标三状态建模的遮挡目标多帧跟踪方法,其特征在于:所述的目标三状态状态转移矩阵m以及的航迹分量的三状态状态转移矩阵m
′
取值;
[0103][0104]
作为优选,若k时刻当航迹刚起始得到或目标航迹只有一条航迹分量时,p(c
k-1
)=1。
[0105]
作为优选,所述的裁剪门限τc取值为0.05。
[0106]
本发明相对于现有技术具有的效果:本发明通过对目标存在事件进行三状态描述,考虑目标存在但无法被观测到的可能性,对目标存在三状态的时域演变规律进行一阶马尔科夫链建模,通过保留历史航迹,形成航迹分量树的方式以减少虚假航迹的出现,利用
后续观测信息来加强前期关联假设的可信度,同时引入航迹存在概率pte的概念进行航迹管理,在高目标漏检、密集杂波的复杂环境下,提升对遮挡目标跟踪性能的鲁棒性,同时在航迹维持、虚假航迹剔除以及目标状态估计性能上均有所提升。
附图说明
[0107]
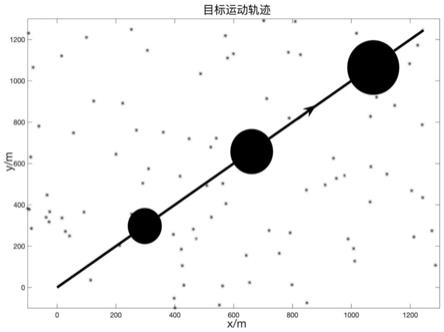
图1是杂波环境下的目标运动轨迹;
[0108]
图2是its-mc2和ipda-mc2的平均位置rmse比较图;
[0109]
图3是its-mc2和ipda-mc2的ctt平均个数比较图;
[0110]
图4是its-mc2和ipda-mc2的航迹占比率比较图;
具体实施方案
[0111]
以下结合技术方案和附图,详细叙述本发明的具体实施方式。
[0112]
假设:1)假设传感器的分辨率无限大且目标为点目标,即:每个量测有且仅有一个来源(杂波或目标);2)在监控区域内,杂波量测的状态在空间上服从均匀分布,时间上杂波个数服从泊松分布;3)目标做近似匀速直线运动目标,目标初始位置、运动状态以及某时刻杂波的分布情况等见图1。
[0113]
结合上述假设,进行本发明实施步骤的描述:
[0114]
在二维平面内k时刻动力学状态时域演变模型表达式为:
[0115]
xk=fx
k-1
+vk[0116]
其中,xk表示k时刻目标动力学状态,表示k时刻目标动力学状态,分别表示目标在二位笛卡尔坐标系中x、y方向上的位置、速度状态信息;f表示k时刻目标状态转移矩阵;vk为零均值、协方差为q的高斯白噪声,q为目标运动过程噪声误差协方差矩阵。
[0117]
目标量测值yk以及杂波以传感器一定检测概率pd探测得到,表达式为:
[0118]
yk=hxk+wk[0119]
其中h为量测转移矩阵,传感器的量测形式是线性的,量测噪声wk为零均值、协方差为r的高斯白噪声;目标不存在或者目标被遮挡时,那么传感器无法探测到目标量测,目标量测值yk返回一个空量测。
[0120]
一种基于目标三状态建模的遮挡目标多帧跟踪方法,该方法具体包括以下步骤:
[0121]
(1)k时刻的输入:
[0122]
传感器产生的量测集yk。
[0123]
目标存在且可见概率
[0124]
目标存在但不可见概率
[0125]
对于每个航迹分量c
k-1
:相对概率p(c
k-1
);均值协方差p
k-1|k-1
(c
k-1
);各航迹分量目标存在且可见概率各航迹分量目标存在但不可见概率
[0126]
其中表示k-1时刻目标存在且可见,表示k-1时刻目标存在但不可见,
[0127]
(2)k时刻,目标航迹的存在概率预测。
[0128][0129]
其中,m为目标三状态状态转移矩阵。表示目标k时刻不存在。
[0130][0131]
(3)k时刻,目标航迹的航迹分量c
k-1
存在概率预测。
[0132][0133][0134]
其中,m
′
为航迹分量的三状态状态转移矩阵,目标的三状态状态转移矩阵与航迹分量的三状态状态转移矩阵取值相同。
[0135]
航迹分量c
k-1
存在概率预测,采用标准的卡尔曼滤波预测。
[0136][0137]
kf
p
表示标准的卡尔曼滤波预测,具体公式如下:
[0138][0139]
p
k|k-1
(c
k-1
)=fp
k-1|k-1
(c
k-1
)f
t
+q
[0140]
(4)观测选择
[0141]
通过下式,计算得到k时刻各个航迹分量c
k-1
量测预测的均值以及新息协方差sk(c
k-1
)。
[0142][0143][0144]
sk(c
k-1
)=h*p
k|k-1
(c
k-1
)*h
′
+r
[0145]
航迹分量卡尔曼增益k(c
k-1
):
[0146]
k(c
k-1
)=p
k|k-1
(c
k-1
)hs
k-1
(c
k-1
)
[0147]
目标航迹分量c
k-1
进行观测选择,选择准则如下:
[0148][0149]
其中,为波门大小,取决于波门概率pg的大小,整理所有航迹分量的预选观测得到预选观测集合
[0150][0151]
(5)似然值计算
[0152]
计算各个航迹分量的似然值pk(i,c
k-1
):
[0153][0154]
计算目标航迹的似然值pk(i):
[0155][0156]
(6)目标航迹状态更新
[0157]
计算似然比:
[0158][0159]
其中,ρk为杂波密度。当mk=0时,即没有量测落入门限,令δk=pdpg,则λk=1-δk。
[0160]
目标存在概率p(χk|yk)更新:
[0161][0162]
关联概率的计算:
[0163]
第i个目标存在且可见关联概率:
[0164][0165]
第i个目标存在但不可见关联概率:
[0166][0167]
暂时航迹分量建立,令暂时航迹分量
[0168]
航迹分量第i个目标且存在且可见概率:
[0169][0170]
航迹分量第i个目标存在但不可见概率:
[0171][0172]
航迹分量动力学状态的更新:
[0173]
[0174]
i=0航迹分量不进行更新,航迹分量的状态值等于航迹分量的预测值。
[0175][0176][0177][0178]
i>0,航迹分量状态进行卡尔曼滤波更新:
[0179][0180][0181]
(7)航迹分量管理
[0182]
计算航迹分量相对概率
[0183][0184]
设置裁剪门限τc,对相对概率的航迹分量进行裁剪。根据进行裁剪后得到新的航迹分量ck′
。
[0185][0186]
对裁剪后的航迹分量ck′
进行归一化,得到k时刻的航迹分量ck的相对概率p(ck)、均值协方差p
k|k
(ck)、存在且可见概率以及存在但不可见概率
[0187][0188][0189]
p
k|k
(ck)=p
k|k
(ck′
)
[0190][0191][0192]
整理得到k时刻的航迹分量ck:
[0193][0194]
(8)目标动力学状态输出:
[0195]
k时刻目标存在且可见概率更新:
[0196][0197]
k时刻目标存在但不可见概率更新:
[0198][0199]
k时刻目标动力学状态输出:
[0200][0201][0202][0203]
重复(1)~(8)进行时域迭代计算,最终获取各个时刻目标动力学状态估计。
[0204]
算法仿真比较
[0205]
以目标状态估计均方根误差(root mean square error:rmse)、ctt(confirmed true target:ctt)平均个数、航迹占比率以及航迹零碎度作为衡量算法的性能指标。将本发明所提方法与ipda-mc2进行比较,共进行100次蒙特卡洛仿真实验。
[0206]
100次蒙特卡洛实验下,平均目标位置rmse、ctt平均个数、航迹占比率的性能比较分别见图2、3、4,航迹零碎度见表1;
[0207]
表1 航迹零碎度
[0208][0209][0210]
由图知:相比ipda-mc2,在密集杂波、目标漏检的背景下,本发明所设计的its-mc2针对遮挡目标在目标长时间被遮挡区域的跟踪精度以及ctt的平均个数明显优于现有的ipda-mc2;its-mc2提高了遮挡目标跟踪的航迹占比率,同时降低了航迹零碎度;增强目标跟踪性能的鲁棒性,同时在航迹维持、虚假航迹剔除上均有所提升。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1