一种基于无人机的共享单车感应定位系统及方法
1.本发明属于单车寻回流程技术领域,具体涉及一种基于无人机的共享单车感应定位系统及方法。
背景技术:
2.gps监控是结合了gps技术、无线通信技术(gsm/gprs/cdma)、图像处理技术及gis技术,用于对移动的人、宠物、车及设备进行远程实时监控的一门技术,监控中心能全天侯24小时监控所有被控车辆的实时位置、行驶方向、行驶速度,以便最及时的掌握车辆的状况。共享单车是一种分时租赁模式,也是一种新型绿色环保共享经济。
3.随着社会的飞快发展,交通也越来越便捷,使用共享单车的人也越来越多,但是没有适当的保养,状况良好的自行车数量在不断减少,因此,需要公司安排工人收集和回收,而对于共享单车的回收,尤其是在大城市中,存在着定位不准确、人力资源耗费大等问题,因此需要一种可以准确定位的共享单车感应系统。
技术实现要素:
4.发明目的:本发明的目的在于提供一种基于无人机的共享单车感应及定位系统,以解决上述背景技术中提出的大城市中回收共享单车所产生的定位不准确、人力资源耗费大的问题。
5.技术方案:本发明提供基于无人机的共享单车感应及定位系统,包括共享单车模块和无人机模块;所述共享单车模块通过无线网络与无人机模块通讯连接;所述共享单车模块包括单车语音提示模块、单车信号发出模块、单车gps模块和单车信号接收模块;所述无人机模块包括无人机信号发出模块、无人机gps模块、无人机信号接收模块和定位跟踪与提示装置所述定位跟踪与提示装置包括保护壳、实时信号接收模块、gps实时定位模块、实时信号发出模块、控制模块和电磁铁固定模块;所述实时信号接收模块、gps实时定位模块和实时信号发出模块均集成在控制模块上;所述电磁铁固定模块与控制模块电性连接,通电后可隔着保护壳吸附在金属物上;所述单车gps模块和无人机gps模块分别实时定位共享单车位置信息和无人机位置信息,并通过无线网络实现位置共享。
6.进一步地,所述单车语音提示模块、单车信号发出模块、单车gps模块和单车信号接收模块之间相互电性连接,且均集成在一个电路板上。
7.进一步地,所述无人机信号发出模块、无人机gps模块和无人机信号接收模块之间相互电性连接,且均集成在一个电路板上。
8.进一步地,所述单车信号接收模块可实时接收到无人机信号发出模块发出的无线讯号。
9.进一步地,所述共享单车模块和无人机模块均采用卡尔曼滤波算法进行gps定位以及实时位置确定;所述卡尔曼滤波算法通过伪距估计出接收机的位置和钟差。
10.进一步地,所述保护壳内部还设置有内置电池;所述实时信号接收模块gps实时定
位模块、实时信号发出模块、控制模块和电磁铁固定模块均与内置电池电性连接。
11.进一步地,所述位跟踪与提示装置工作流程如下:
12.电磁铁固定模块通电后可隔着保护壳吸附在金属物上,当无人机准确的找寻到共享单车时,此时通过操控无人机靠近被找寻到的共享单车;
13.当无人机靠近共享单车之后会通过无线信号控制定位跟踪与提示装置,此时定位跟踪与提示装置内部的电磁铁固定模块则会断电并失去磁吸力度,从而会从无人机上准确的掉落到共享单车上;
14.定位跟踪与提示装置掉落到共享单车上时,控制模块会快速的控制保护壳内部的内置电池给电磁铁固定模块通电,使得电磁铁固定模块会瞬间通电并磁吸在共享单车上,从而使得定位跟踪与提示装置被固定在找寻到的共享单车上;同时保护壳内部的gps实时定位模块会实时共享位置信息,且实时信号发出模块会与共享单车上的单车语音提示模块实时连接;
15.当被找寻到的共享单车发生移动时,gps实时定位模块会监测到被找寻到共享单车产生的位置移动,控制模块会通过实时信号发出模块启动共享单车上的单车语音提示模块,使得单车语音提示模块发出警报声。
16.基于相同的发明构思,本发明还提出一种基于无人机的共享单车感应定位方法,包括以下步骤:
17.s1:通过无人机gps模块开启gps定位,通过无人机的信号发出模块发射信号波,由单车信号接收模块接收信号波,并且开启gps定位共享;
18.s2:通过单车的信号发出模块发出自己的位置信息,由无人机信号接收模块接收,并感应到共享单车位置;
19.s3:电磁铁固定模块通电后可隔着保护壳吸附在金属物上,当无人机准确的找寻到共享单车时,此时通过操控无人机靠近被找寻到的共享单车;
20.s4:当无人机靠近共享单车之后会通过无线信号控制定位跟踪与提示装置,此时定位跟踪与提示装置内部的电磁铁固定模块则会断电并失去磁吸力度,从而会从无人机上准确的掉落到共享单车上;
21.s5:定位跟踪与提示装置掉落到共享单车上时控制模块会快速的控制保护壳内部的内置电池给电磁铁固定模块通电,使得电磁铁固定模块瞬间通电并磁吸在共享单车上,从而使得定位跟踪与提示装置被固定在找寻到的共享单车上,而此时保护壳内部的gps实时定位模块则会实时共享位置信息,且实时信号发出模块会与共享单车上的单车语音提示模块实时连接;
22.s6:当有人移动被找寻到的共享单车时,gps实时定位模块则会监测到被找寻到共享单车产生位置移动,控制模块则会通过实时信号发出模块来启动共享单车上的单车语音提示模块,使得单车语音提示模块发出警报声,提醒移动共享单车的人不要移动该单车。
23.有益效果:与现有技术相比,本发明的有益效果:1、本发明能够准确定位共享单车位置信息,从而能够缓解大城市中回收共享单车所产生的定位不准确、人力资源耗费大等问题;2、本发明通过在无人机上增加定位跟踪与提示装置,能够帮助回收工可实时且精确的寻找到被定位的共享单车,从而能够实时的知道共享单车位置并对单车进行回收。
附图说明
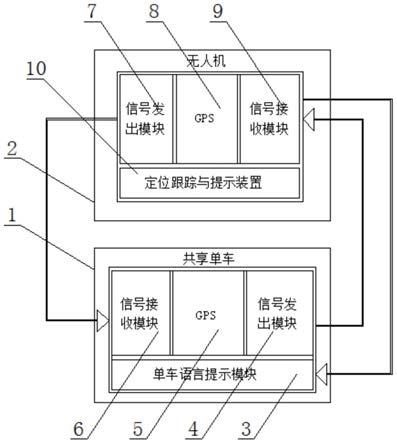
24.图1为基于无人机的共享单车感应及定位系统结构示意图;
25.图2为定位跟踪与提示装置结构示意图;
26.图3为本发明提出的无人机工作流程结构示意图
27.图4为本发明提出的共享单车工作流程结构示意图;
28.其中:1、共享单车模块;2、无人机模块;3、单车语音提示模块;4、单车信号发出模块;5、单车gps模块;6、单车信号接收模块;7、无人机信号发出模块;8、无人机gps模块;9、无人机信号接收模块;10、定位跟踪与提示装置;11、保护壳;12、实时信号接收模块;13、gps实时定位模块;14、实时信号发出模块;15、控制模块;16、电磁铁固定模块。
具体实施方式
29.下面结合附图对本发明作进一步详细说明。
30.本发明提出一种基于无人机的共享单车感应定位系统,如图1所示,包括共享单车模块1和无人机模块2,共享单车模块1通过无线网络与无人机模块2通讯连接。共享单车模块1和无人机模块2均采用卡尔曼滤波算法进行gps定位以及实时位置确定。卡尔曼滤波算法通过伪距估计出接收机的位置和钟差,卡尔曼滤波算法有效避免了由于滤波初值、系统噪声方差以及量测噪声方差带来的滤波发散问题。
31.共享单车模块1包括单车语音提示模块3、单车信号发出模块4、单车gps模块5和单车信号接收模块6。单车语音提示模块3、单车信号发出模块4、单车gps模块5和单车信号接收模块6之间相互电性连接,且均集成在一个电路板上。语音提示模块3由语音模块、控制电路、喇叭和电源构成的放音器组成;信号发出模块4主要采用高频信号发生器;信号接收模块6主要采用无线网络接收器。无人机通过无线网络感应到共享单车之后,无人机会通过无线网络把信号反馈给单车语音提示模块3,单车语音提示模块3接收到信号之后会发出提示音。
32.无人机模块2包括无人机信号发出模块7、无人机gps模块8、无人机信号接收模块9和定位跟踪与提示装置10。无人机信号发出模块7发出无线讯号之后会被单车信号接收模块6实时的接收到;无人机信号发出模块7、无人机gps模块8和无人机信号接收模块9相互电性连接,且均集成在一个电路板上;单车gps模块5和无人机gps模块8分别实时定位共享单车位置信息和无人机位置信息,并通过无线网络实现位置共享。
33.如图2所示,定位跟踪与提示装置10包括保护壳11、实时信号接收模块12、gps实时定位模块13、实时信号发出模块14、控制模块15和电磁铁固定模块16。信号接收模块12主要采用无线网络接收器,信号发出模块14主要采用高频信号发生器,控制模块15采用的为无线控制器,电磁铁固定模块16采用bj_dh_16型号的小型电磁铁,定位跟踪与提示装置10采用hwt-ps数码跟踪仪。实时信号接收模块12、gps实时定位模块13、实时信号发出模块14、控制模块15和电磁铁固定模块16均设置在保护壳11的内部;实时信号接收模块12、gps实时定位模块13和实时信号发出模块14均集成在控制模块15上;电磁铁固定模块16通过电线与控制模块15电性连接;保护壳11内部还设置有内置电池,实时信号接收模块12、gps实时定位模块13、实时信号发出模块14、控制模块15和电磁铁固定模块16均与内置电池电性连接,电磁铁固定模块16通电后可隔着保护壳11吸附在金属物上。
34.当无人机准确的找寻到共享单车时,此时通过操控无人机靠近被找寻到的共享单车,当无人机靠近共享单车之后会通过无线信号控制定位跟踪与提示装置10,此时定位跟踪与提示装置10内部的电磁铁固定模块16则会断电并失去磁吸力度,从而会从无人机上准确的掉落到共享单车上。而定位跟踪与提示装置10掉落到共享单车上时控制模块15会快速的控制保护壳11内部的内置电池给电磁铁固定模块16通电,使得电磁铁固定模块16会瞬间通电并磁吸在共享单车上,从而使得定位跟踪与提示装置10被固定在找寻到的共享单车上,而此时保护壳11内部的gps实时定位模块13则会实时共享位置信息,且实时信号发出模块14会与共享单车上的单车语音提示模块3实时连接。
35.当有人移动被找寻到的共享单车时,此时gps实时定位模块13则会监测到被找寻到共享单车产生位置移动,所以控制模块15则会通过实时信号发出模块14来启动共享单车上的单车语音提示模块3,使得单车语音提示模块3发出警报声,从而提醒移动共享单车的人不要移动该单车,这样能够避免使用者临时使用共享单车而造成被找寻到的共享单车位移而影响到回收,从而能够保证被找寻到的共享单车保证在当前安放的位置上,使得回收人员能够准确的找到该单车并进行回收。
36.基于相同的发明构思,本发明还提供一种基于无人机的共享单车感应定位方法,包括以下步骤:
37.s1:如图3所示,通过无人机gps模块8开启gps定位,通过无人机的信号发出模块7发射信号波,由单车信号接收模块6接收信号波,并且开启gps定位共享。
38.s2:通过单车的信号发出模块(4)发出自己的位置信息,由无人机信号接收模块9接收,并感应到共享单车位置。
39.s3:电磁铁固定模块16通电后可隔着保护壳吸附在金属物上,当无人机准确的找寻到共享单车时,此时通过操控无人机靠近被找寻到的共享单车。
40.s4:当无人机靠近共享单车之后会通过无线信号控制定位跟踪与提示装置10,此时定位跟踪与提示装置10内部的电磁铁固定模块16则会断电并失去磁吸力度,从而会从无人机上准确的掉落到共享单车上。
41.s5:定位跟踪与提示装置10掉落到共享单车上时控制模块15会快速的控制保护壳内部的内置电池给电磁铁固定模块16通电,使得电磁铁固定模块16瞬间通电并磁吸在共享单车上,从而使得定位跟踪与提示装置10被固定在找寻到的共享单车上,而此时保护壳内部的gps实时定位模块13则会实时共享位置信息,且实时信号发出模块14会与共享单车上的单车语音提示模块3实时连接。
42.s6:如图4所示,当有人移动被找寻到的共享单车时,此时gps实时定位模块13则会监测到被找寻到共享单车产生位置移动,所以控制模块15则会通过实时信号发出模块14来启动共享单车上的单车语音提示模块3,使得单车语音提示模块3发出警报声,提醒移动共享单车的人不要移动该单车。
43.整个系统工作时,无人机开启gps定位,通过无人机的信号发出模块发射信号波,由共享单车信号接收模块6接收信号波,并且开启gps定位共享,其次,通过共享单车的信号发出模块发出自己的位置信息,由无人机信号接收模块9所接收,并感应到共享单车位置,最后,无人机把信号反馈给单车语音提示模块3,单车发出提示,回收单车成功,本发明可以准确定位共享单车,并给与提醒,缓解共享单车回收存在的一些问题,适应能力较好,工作
效率较高。
44.本发明安装好过后,在组装使用该基于无人机的共享单车感应系统及定位方法时,首先需要把单车语音提示模块3、单车信号发出模块4、单车gps模块5和单车信号接收模块6均集成在一个电路板上,然后把该电路板在单车生产过程中安装到共享单车上,然后再把无人机信号发出模块7、无人机gps模块8和无人机信号接收模块9均集成在一个电路板上,且把该电路板安装到无人机上,工作时,首先,无人机开启无人机gps模块8进行定位,通过无人机信号发出模块7发射信号波,由共享单车的单车信号接收模块6接收信号波,并且开启gps定位共享,其次,通过共享单车的单车信号发出模块4发出自己的位置信息,由无人机信号接收模块9进行信号接收,从而感应到共享单车位置,最后,无人机把信号反馈给单车语音提示模块3,单车发出提示,从而回收单车成功。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1