带有抗振操作模式的超声流量计的制作方法
1.本发明所公开的方面涉及超声流量计(usm)。
背景技术:
2.在涉及产品流量的多种行业中,需要能够在任何给定时间精确地测量流动的产品的量。存在若干不同类型的已知流量计。此类已知的流量计包括机械流量计(例如,活塞式流量计、螺翼式流量计或喷射流量计,它们均通过一些机械装置来测量流体流量)、涡流流量计(其中涡流是通过阻塞流体路径的一部分而产生,从而产生电压脉冲,可测量其频率并因此可确定流量)、磁性流量计(测量外加磁场产生的导电流体的电势差,并可确定流量)、涡轮流量计以及旋转流量计。还存在包括usm在内的静态(意味着没有移动部件)流量计。
3.usm在流体流量计量方面越来越受欢迎,因为它们能够测量各种不同的流量,仅引起极小的压降,并且它们也不具有移动部件,因此与大多数常规流量计类型相比,它们提供更少的机械维护和更好的可靠性。usm中的关键硬件部件是超声换能器,也称为超声传感器,其包括至少压电晶体或压电陶瓷,通常包含锆钛酸铅(pzt)。如物理学中已知的,压电效应是某些材料响应于施加的机械应力而生成电荷的能力,以及相反的过程。尽管usm可包括单个超声换能器,但usm通常包括至少一对超声换能器,其通过转换以脉冲电驱动信号形式提供的电能来操作,该脉冲电驱动信号被传送至超声换能器,该超声换能器将接收的电能转换成超声信号,该超声信号被传输并导向被测量的流体,在用作超声接收器时反之亦然。
4.此类usm可包括外部壳体,并且在外壳内可存在印刷电路板(pcb),该印刷电路板包括控制器,诸如微控制器单元(mcu)或数字信号处理器,以及通常其他电子器件。usm通常由电池供电和/或由外部线路供电,并且可包括射频(rf)单元以及用于无线通信的天线,该射频单元包括发射器和接收器。超声换能器对包括第一超声换能器和第二超声换能器。在一种常规超声换能器布置方式中,第一换能器和第二换能器被配置在管道的同一侧上,以在穿过待测量的流体之后使用离开管道的单次反射来产生v形超声信号路径。另一种已知的超声换能器布置方式是不涉及任何信号反射的直接传输路径类型。存在多种其他已知的换能器布置方式,并且取决于管道直径和成本限制,换能器的数量总计可高达约16个或甚至更多个。
5.一种已知的usm布置方式包括通常被描述性地称为执行机构的装置,该执行机构包括外壳、具有包括处理器(诸如mcu)的电子器件的pcb、电池组以及机械耦接和电耦接到仪表主体的显示器,该仪表主体包括具有第一超声换能器和至少第二超声换能器的管道件。执行机构的外壳和仪表主体之间的连接包括用于通信的线材和用于物理连接的金属接头。
技术实现要素:
6.提供本发明内容以介绍简化形式的公开概念的简要选择,其在下文包括所提供附图的具体实施方式中被进一步描述。该发明内容不旨在限制所要求保护的主题的范围。
7.本发明所公开的方面认识到usm的问题在于,它们容易受到在其超声换能器的工作频率范围内的频率下由外来机械振动或噪声引起的干扰的影响。这种干扰效应可降低usm流量测量精度。在本领域usm的应用中,通常存在邻近usm安装的气体调节器和/或阀,诸如球阀、球心阀、蝶阀或提升阀。气体调节器可在通常低于几百千赫(khz)的频率下产生振动,当邻近usm定位时,可由通常在80khz至300khz下操作的usm的换能器拾取该振动。本文已经认识到,此类振动可增加超声感测信号中的噪声,这导致usm的测量精度降低,这也可导致包括由于使usm提供了显著不精确的测量气体体积,因此金融交易受到影响的问题。
8.本发明所公开的一个方面包括usm,该usm包括:仪表主体,该仪表主体包括被配置成使流体流过其中的管道节,该管道节包括第一超声换能器和第二超声换能器;以及执行机构,该执行机构包括外壳和pcb,该pcb包括电子器件,该电子器件包括通过发射器和/或接收器耦接到超声换能器的控制器。pcb还包括加速度计和/或声学传感器,用于感测管道节上的振动并且用于提供耦接到控制器的输出信号。电子器件通信地耦接到仪表主体以及外壳,该外壳通过机械接头机械地联接到仪表主体。控制器分析来自加速度计和/或声学传感器的信号,以识别至少一个振动频率,并将振动频率与usm的预定敏感频率范围进行比较。当确定振动频率处于预定频率范围内时,控制器通过在测量流体流量时增加测量和处理时间和/或添加额外的数据处理任务来处理振动,从而实现抗振操作模式。
9.加速度计通常为微机电系统(mems)封装的形式,其具有多个引线或引线端子以有利于其安装在pcb上,并且声学传感器通常为高频声学传感器,诸如高频麦克风,该高频麦克风通常也被配置在被配置成安装在pcb上的封装中。加速度计和声学传感器(在两者均被提供时)可在振动源邻近usm定位时可存在的一系列频率范围内感测来自振动源的外来振动。控制器通常以固件的形式运行算法,该算法在需要时通过自动切换到抗振操作模式来监测和抑制振动噪声效应,以使usm测量精度在很大程度上不受影响,尽管在原本影响usm的精度和可重复性性能的频率范围内存在振动。
附图说明
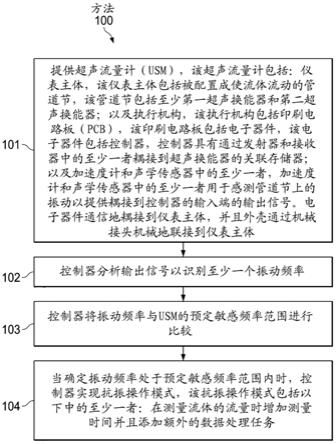
10.图1为示出操作usm的示例性方法的步骤的流程图,该示例性方法响应于感测usm的预定敏感频率范围内的振动来实现抗振操作模式。
11.图2a描绘了以举例的方式示出为气体调节器的振动源,当邻近图2b所示的usm时,该气体调节器导致影响由固定在usm的仪表主体上的超声换能器(t1和t2)感测到的信号。图2c为振幅(以任意单位(au)计)与时间的示例性曲线图,示出了可用(感测)信号以及来自外部振动源的振动,该来自外部振动源的振动与由外部振动源(诸如图2a中所示的气体调节器或阀)引起的可用信号重叠。图2d示出了振幅与时间的示例性曲线图,其仅示出了在由外部振动源引起的振动被移除之后或在被本发明所公开的抗振操作模式严重抑制之后图2c所示的可用信号。
12.图3a示出了根据一个示例性方面的示例性usm,该示例性usm包括:pcb,该pcb位于仪表主体的顶部;以及一些示例性部件,该一些示例性部件位于pcb上并且包括本发明所公开的加速度计和本发明所公开的声学传感器。
13.图3b为具有位于仪表主体上的执行机构的示例性usm,示出了执行机构的pcb的示例性部件。
14.图4描绘了根据一个示例性方面的示例性振动噪声去除系统的感测硬件模块示意图。
15.图5描绘了根据一个示例性方面的usm的示例性噪声检测和去除方法的示例性信号处理流程图。
具体实施方式
16.参考附图描述了本发明所公开的方面,其中类似的附图标号用于在所有附图中指代类似或等同的元件。附图未按比例绘制,并且其仅提供用于说明某些公开的方面。下面参考用于说明的示例性应用来描述若干公开的方面。应当理解,阐述了许多具体细节、关系和方法以提供对所公开方面的完全理解。
17.图1为示出示例性方法100的步骤的流程图,该示例性方法操作usm以响应于感测usm的预定敏感频率范围内的振动来实现抗振(或耐振)操作模式。预定敏感频率范围可由超声换能器的谐振频率来确定。例如,超声换能器的谐振频率可通过使用声换能器的最大相位和/或最小阻抗中的至少一者来确定。在一个示例中,预定敏感频率范围为80khz至300khz。
18.步骤101包括提供usm,该usm包括:仪表主体,该仪表主体包括被配置成使流体流动的管道节,该管道节包括至少第一超声换能器和第二超声换能器;以及执行机构,该执行机构包括pcb,该pcb包括电子器件,该电子器件包括控制器(例如,mcu),该控制器具有通过发射器和接收器中的至少一者耦接到超声换能器的关联存储器。加速度计和声学传感器中的至少一者用于感测管道节上的振动并且用于提供表示耦接到控制器的输入端的振动的输出信号。pcb还可包括电池,该电池通常包括电池组,诸如锂离子电池组。管道中的流体可包含烃气体,诸如天然气或丙烷,或者也可包含氢。
19.本发明所公开的方法的优点在于,入口管(例如,通常在usm之前和调节器之后安装的阀芯)的长度不限于将usm与外部振动源(诸如气体调节器)分开通常所需的最小长度。入口管越长,间距越大,振动源对usm的噪声影响越小,但所需的空间越大,这在实际安装中是不常见的。在大多数usm安装中,振动源通常位于相对于usm邻近的位置。
20.关于加速度计,当安装在振动结构上时,加速度计成比例地将机械能转换成电能。加速度计通常属于两类中的一类,产生10mv/g或100mv/g,其中g为重力常数,并且其中1g=9.81m/s2。由加速度计提供的输出电压的频率将与振动的频率相匹配。来自加速度计的信号的输出电平将与振动的振幅成比例。
21.声波传感器可包括高频麦克风或超声传感器。已知,声波传感器是一种可测量声级的电子设备。执行机构还可包括显示器。位于执行机构的pcb上的电子器件通过线材或通过无线连接通信地耦接到仪表主体。执行机构的外壳通过机械接头(通常为金属接头)机械地联接到仪表主体。控制器用于实现下文所述的步骤102至步骤104。
22.步骤102包括分析输出信号以识别至少一个振动频率。步骤103包括将振动频率与usm的预定敏感频率范围进行比较。步骤104包括当确定振动频率处于预定敏感频率范围内时,实现包括以下中的至少一者的抗振操作模式:在测量流体的流量时增加测量时间;以及添加额外的数据处理任务。
23.图2a描绘了被示出为可邻近图2b所示的usm 200的气体调节器207的振动源,其中
图2c示出了振幅与时间的曲线图,其示出了可用(感测)信号以及由充当外部振动源的气体调节器207引起的振动。usm 200包括:仪表主体220,其包括换能器t1和换能器t2;以及执行机构210,该执行机构包括位于仪表主体220的顶部上的外壳218。由气体调节器207产生的振动在图2c中示出,该振动通过处于可用信号的频率范围内而影响由固定在usm的仪表主体上的超声换能器感测的信号。可使用快速傅里叶变换(fft)将图2c和图2d中所示的时间序列信号变换到频域中以获得信号频谱。
24.如本文所用,术语“邻近”是指不超过其上安装有usm的管道节的内径(d)的三倍的距离。例如,当d=2英寸时,邻近对应于距usm 6英寸的入口距离。应当注意,usm与振动源(诸如包括气体调节器或阀)的间距距离越长,振动效应越小。图2d示出了振幅与时间的示例性曲线图,其仅示出了在由外部振动源引起的振动被移除之后或在被本发明所公开的抗振操作模式严重抑制之后图2c所示的可用信号。例如,针对在200khz的中心频率下操作的超声换能器的压电元件,可用信号可处于180khz至220khz的频率范围内。
25.因此,本发明所公开的usm可包括加速度计和声学传感器两者,诸如位于执行机构的pcb上的高频(hf)麦克风,其中pcb与仪表主体紧密物理接触,以接收由邻近usm的外部振动源引起的振动。当usm邻近振动源(诸如气体调节器)安装在同一管道上时,由如图2c所示的振动源引起的振动在可用信号的超声频谱中产生类噪声信号,该类噪声信号沿着管道行进到usm的仪表主体,并且因此到达执行机构,其中包括加速度计和/或声学传感器的pcb通常经由集成到外壳的金属夹具牢固地附连。
26.超声换能器以及加速度计可使用内置集成电路(i2c)、串行外围接口(spi)或通用异步接收器/发射器(uart)与控制器通信。控制器(诸如包括mcu)被配置成分析感测数据、检测振动频谱以及确定usm是否应切换到抗振模式。本发明所公开的抗振模式通常由基于固件(fw)的算法来实现,该算法包括程序代码,该程序代码被配置成通过使用下文更详细描述的更长的测量时间和/或额外的数据处理任务来减小噪声效应。
27.图3a示出了图2所示的示例性usm 200,其中通过打开外壳218示出了外壳218的pcb 340的示例性部件。所示部件包括加速度计310和声学传感器320,该加速度计可包括3d加速度计,该声学传感器可包括高频麦克风传感器。加速度计310和声学传感器320两者被示出为安装在pcb 340上。
28.图3b示出了具有执行机构210'的示例性usm 300,该执行机构包括外壳218,其中执行机构210'位于仪表主体220上,如图所示,该仪表主体包括可位于前盖后面,因而从外部不可见的换能器t1和换能器t2,该图示出了除了图3a所示的部件之外的执行机构的pcb 340的示例性部件。同样,示出了加速度计310和声学传感器320,尽管未示出耦接到控制器330,但两者均通信地耦接到控制器330。图3b所示的电池309任选地安装在pcb340上。
29.本发明所公开的usm(诸如usm 300)通常是低功率、低成本的,并且包括智能usm。如上所述,控制器330可包括mcu,存储器324可包括闪存存储器,并且射频(rf)通信单元被示出为包括耦接到天线376的发射器(tx)311和接收器(rx)312,该天线被示出为位于外壳218的外部。外壳218通常包含金属或金属合金。
30.被示出为t1和t2的与仪表主体220相关联的超声换能器包括压电晶体或压电陶瓷,该压电晶体或压电陶瓷在脉冲电压信号(从tx 311接收)被施加到其压电元件时被设定进入振动,从而生成超声波。在操作中,由控制器330控制的数控多路复用器(mux)315使得超
声脉冲交替地由超声换能器对的压电元件中的一个压电元件发射,并且由超声换能器对中需要用于气体流量测量的另一个压电元件接收。
31.与控制器330相关联的存储器被示出为“mem”324,其可存储用于实现流量测量和用于实现本发明所公开的抗振模式操作的代码。然而,如本领域中已知的,由控制器330运行的算法可由硬件实现或由软件实现。关于基于硬件的具体实施,算法方程可诸如使用vhdl(硬件描述语言)转换成数字逻辑门模式,然后该vhdl可使用可编程器件(诸如现场可编程门阵列(fpga)或复杂可编程逻辑器件(cpld)或专用的专用集成电路(asic))来实现,以实现逻辑门模式。关于基于软件的具体实施,算法的代码一般存储在存储器中,诸如可由控制器330实现的存储器324。
32.仪表主体220包括用于接收流体的入口221和用于在流量测量之后释放流体的出口222。尽管t1和t2被示出为呈笔直的面对面换能器布置方式,但如上所述,超声换能器可以其他布置方式配置,诸如基于反射的v型布置方式。此外,如上所述,可存在两个以上的超声换能器。
33.图4描绘了根据一个示例性方面的示例性噪声去除系统的感测硬件模块示意图400。示出了由加速度计310感测的小于或等于20khz的噪声频率,以及由被示出为麦克风320'的声学传感器(其也可为超声传感器)感测的大于或等于20khz的噪声频率。如上所述,该噪声可来自邻近usm定位的气体调节器或阀。加速度计310和麦克风320'的输出端被示出为耦接到被示出为315'的二比一数控多路复用器,该数控多路复用器的输出端耦接到通常包括带通滤波和低噪声放大的信号调节电路420。信号调节电路420的输出端耦接到高速模数转换器(adc)425,该高速模数转换器被示出为通过串行外围接口(spi)与控制器通信,该控制器被示出为实现本发明所公开的噪声去除的处理mcu 120'。
34.图5为根据一个示例性方面的usm的示例性噪声检测和去除方法500的信号处理流程图。步骤501包括加速度计和/或声学传感器检测来自振动源(诸如邻近usm的气体调节器或阀)的振动,并且作为响应,生成振动数据。步骤502包括将振动数据传送到图4中示出为mcu 120'的控制器。尽管未被示出,但通常在将振动数据传送到mcu 120'之前执行信号调节和adc操作两者,诸如图4中示出的用于信号调节的信号调节电路420,以及用于执行adc功能的adc 425。adc 425可以每秒超过1百万个样本(sps)的采样速率操作。
35.步骤503包括mcu 120'对经处理的振动数据执行fft,以执行时域至频域转换函数。如本领域已知的,fft是计算序列的离散傅里叶变换(dft)或其逆傅里叶变换(idft)的算法。傅里叶分析将时间信号或空间信号从其初始域(此处为振幅与时间的数据,诸如上文所述的图2c所示)转换为离散频域振动数据。步骤504包括执行频域振动数据与usm的已知操作频率范围的频谱和信噪比(snr)阈值比较,其中已知频率范围数据由usm在框507中提供。在框507中由usm框提供的相同已知频率范围数据也被提供至步骤508,该步骤包括使用已知频率范围数据以指定的精度生成snr阈值。
36.提供来自步骤504和步骤508的数据作为输入数据以实现步骤509,该步骤包括确定振动噪声是否通过超过阈值而显著地影响usm的snr。步骤508识别snr,在很大程度上确定了usm的精度,并且不同的应用可具有不同的精度要求并因此具有用于比较snr的不同阈值。snr可以用分贝或线性标度表示。如果在与阈值进行比较时snr被确定为过低,则低snr可由可通过本发明所公开的方法去除或抑制的振动噪声引起,这使得usm的超声波检测以
及因此其精度性能更加可靠,例如当利用飞行时间(tof)检测进行流量测量时。
37.基于步骤509的结果,方法移动至步骤512,该步骤包括决定步骤,该决定步骤涉及决定是否实现本发明所公开的抗振操作模式。如果步骤509的结果确定振动噪声正通过超过阈值来影响snr,则到达步骤513,该步骤包括实现本发明所公开的抗振操作模式。如果步骤509的结果是确定振动噪声通过不超过阈值而不影响snr,则达到步骤514,该步骤包括利用正常usm信号处理模式的usm。
38.如果实现了本发明所公开的抗振操作模式(步骤513),则该方法移至步骤515和步骤516,这两个步骤均包括频域处理。步骤515包括利用由fft提供的频域振动数据的信号解卷积(步骤503),该fft利用步骤504中生成的频谱和snr阈值比较。由步骤515输出的解卷积信号由逆fft框(ifft)516处理。已知,ifft为执行逆(或反向)傅里叶变换的逆快速算法,其取消了fft将频率信号变换为时域序列的过程,诸如上文所述的图2d所示。在框516之后,该方法到达步骤514,该步骤包括如上所述,usm利用正常usm信号处理模式。
39.本发明所公开的方面通常可应用于多种usm。例如,本发明所公开的usm可应用于通常在相对高的压力下(诸如在3巴的压力以上)操作的商业或工业usm,或通常在较低压力下操作的住宅usm。
40.尽管上面已经描述了各种所公开的方面,但是应当理解,它们仅以示例的方式呈现,而非作为限制。在不脱离本公开的实质或范围的情况下,可根据本公开对本文公开的主题进行许多改变。此外,虽然可使用仅关于若干实现方式中的一者来公开特定特征,但是此类特征可与其他实现方式的一个或多个其他特征组合,如对于任何给定或特定应用可能期望或有利的那样。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1