一种正压力不敏感型叉指电容式应变传感器及其制备方法
1.本发明涉及应变传感器,具体是一种正压力不敏感型叉指电容式应变传感器及其制备方法。
背景技术:
2.由柔软可拉伸材料制成的应变传感器在人机界面、软机器人、电子皮肤等领域引起了极大的兴趣,这些应变传感器可以帮助监测软机器人的运动或将人体运动转换为电信号。
3.应变传感器的传感机制主要有三种:电容传感、压阻传感、压电传感。在这些传感机制中,电容传感由于其低温度系数、低功耗和低滞后行为而优于其它传感机制。但是对于平行极板电容来说,由可以得知,无论是拉力还是正压力都会使得电容发生变化,拉力传感与正压力传感之间存在串扰问题,因此平行极板电容式应变传感器无法区分拉力与正压力。
4.对于可以将拉力传感与正压力传感解耦的叉指电容式应变传感器,叉指电容式应变传感器的电容产生于电极之间,叉指电容c的一个单元电容c
u
由三个并联电容组成,分别为两个边缘电场电容c
su1
和c
su2
以及一个平行场电容c
m
,其中边缘场电容由计算所得,平行场电容由计算所得,总电容由计算所得,总电容由计算所得。
5.电极作为叉指电容式应变传感器的关键元件,即使在拉伸条件下也应具有良好的导电性。但是目前被选为叉指电容式应变传感器电极的可拉伸材料薄膜,如银纳米线或碳纳米管网络,虽然可在适度的拉伸应变下保持导电性,却在拉伸应变超过100%时无法保持导电性,因此导致叉指电容式应变传感器无法应用于大的拉伸应变。
6.ju y h等人在(ju y h,han c j,kim k s,et al.uv
‑
curable adhesive tape
‑
assisted patterning of metal nanowires for ultrasimple fabrication of stretchable pressure sensor[j].advanced materials technologies,2021:2100776.)中设计出一种紫外光固化胶带辅助金属纳米线图案化超简易拉伸式压力传感器,这种传感器采用叉指式电极结构,银纳米线作为电极材料,对该传感器无论是施加拉力还是压力,该传感器电容都会发生下降,拉力传感与压力传感之间存在串扰问题,传感器无法区分拉力与压力,并且该传感器的电极只能在适度的拉伸应变下可以保持导电性,无法应用于大的拉伸应变。
[0007]
hesam mahmoudinezhad masoumeh等人在(hesam mahmoudinezhad masoumeh,anderson iain,rosset samuel.interdigitated sensor based on a silicone foam for subtle robotic manipulation.[j].macromolecular rapid communications,
2020:)中设计出一种基于硅泡沫的叉指式传感器,这种叉指式传感器采用叉指式电极结构,在柔性印刷电路板(pcb)上形成叉指电极,并覆盖有可压缩弹性泡沫,该传感器只能应用于检测压力,不能应用于检测拉力,并且该传感器只能检测50n范围内的压力,检测范围很小。
[0008]
专利cn202110131844.x(申请日期2021年1月30日,公开日期2021年6月15日)公开了一种柔性叉指电容传感器结构及其制备方法。该传感器由基底层、中间叉指电极层和上封装层组成,同样采用叉指式电极结构,且电极由液态硅橡胶、刚性导电纤维颗粒、稀释剂和协同剂混炼均匀而成,对该传感器无论是施加拉力还是压力,该传感器电容都会发生下降,拉力传感与压力传感之间存在串扰问题,传感器无法区分拉力和压力,且该传感器仅有0%~45%的应变工作范围,不适用于大的拉伸应变。
[0009]
专利cn202010311401.4(申请日期2020年4月20日,公开日期2020年8月7日)公开了一种基于超级电容传感原理的叉指型对电极式柔性触觉传感器,该传感器的叉指电极采用了丝网印刷工艺将导电油墨印刷于柔性基底上制备而成,该传感器同样采用叉指式电极结构,但只能用来检测压力,不适用于检测拉力。
[0010]
综上所述,目前对柔性叉指传感器的研究和专利缺少,就目前的柔性叉指传感器存在以下局限性:
[0011]
(1)柔性叉指传感器多为压力传感器,缺少对拉伸载荷下柔性叉指传感器的制备及性能研究,部分柔性叉指传感器虽然可以检测拉力,但是拉力传感与正压力传感之间存在串扰问题,从而导致传感器无法区分拉力与压力。
[0012]
(2)许多柔性叉指传感器检测范围小,不适用于大的拉伸应变。
[0013]
研究表明,蚯蚓由多个平行排列的节段组成,当蚯蚓运动时,这些节段舒张收缩交替进行,借助体表肌肉结构及肌电反应实现触觉响应,采用神经索传递外界刺激信号,形成了优良的感知机制,为本发明提供了重要的仿生学启示。基于蚯蚓肌电反应原理设计一种正压力不敏感型叉指电容式应变传感器,可以解决现有电容式应变传感器无法区分拉力与正压力、无法应用于大拉伸应变的问题。
技术实现要素:
[0014]
本发明为了解决现有电容式应变传感器无法区分拉力与正压力、无法应用于大拉伸应变的问题,提供了一种正压力不敏感型叉指电容式应变传感器及其制备方法。
[0015]
本发明是采用如下技术方案实现的:
[0016]
一种正压力不敏感型叉指电容式应变传感器,包括柔性上基板、柔性下基板;柔性上基板的下表面开设有叉指型微流控通道,且叉指型微流控通道的两个接线端与柔性上基板的上表面之间各开设有一个上下贯通的填充孔;柔性上基板的下表面和柔性下基板的上表面粘合在一起;叉指型微流控通道内填充有液态金属叉指电极;两个填充孔的孔口均封堵有粘接剂。
[0017]
柔性上基板和柔性下基板均呈长方形,二者的厚度均小于1mm,二者均采用pdms制成;两个填充孔的直径均为1mm;液态金属叉指电极的厚度为50μm、相邻两个指部的间距为200μm、每个指部的长度均为1cm、每个指部的宽度均为100μm;粘接剂采用sil
‑
poxy硅胶粘接剂;液态金属叉指电极的两个接线端各连接有一根导线。
[0018]
一种正压力不敏感型叉指电容式应变传感器的制备方法(该方法用于制备本发明所述的一种正压力不敏感型叉指电容式应变传感器),该方法是采用如下步骤实现的:
[0019]
步骤s1:制备柔性上基板;具体步骤如下:
[0020]
步骤s1.1:选取第一硅片,然后采用光刻工艺在第一硅片的上表面形成叉指型凸起;
[0021]
步骤s1.2:在第一硅片的上表面旋涂第一pdms层,并保证第一pdms层将叉指型凸起全部覆盖,然后将第一pdms层进行固化;
[0022]
步骤s1.3:将固化后的第一pdms层进行剥离,由此得到下表面开设有叉指型微流控通道的柔性上基板;
[0023]
步骤s1.4:在叉指型微流控通道的两个接线端与柔性上基板的上表面之间各钻设一个上下贯通的填充孔;
[0024]
步骤s2:制备柔性下基板;具体步骤如下:
[0025]
步骤s2.1:选取第二硅片;
[0026]
步骤s2.2:在第二硅片的上表面旋涂第二pdms层,然后将第二pdms层进行固化;
[0027]
步骤s2.3:将固化后的第二pdms层进行剥离,由此得到柔性下基板;
[0028]
步骤s3:将柔性上基板的下表面和柔性下基板的上表面粘合在一起;
[0029]
步骤s4:将柔性上基板和柔性下基板切割成长方形;
[0030]
步骤s5:在两个填充孔的孔口各放置一滴液态金属;
[0031]
步骤s6:先采用真空填充法将两滴液态金属填充入叉指型微流控通道内形成液态金属叉指电极,再在液态金属叉指电极的两个接线端各插入一根导线,然后采用粘接剂将两个填充孔的孔口进行封堵,由此完成制备。
[0032]
所述步骤s1中,光刻工艺的步骤依次为:涂胶、前烘、曝光、后烘、显影;
[0033]
涂胶时,所涂光刻胶为su
‑
8 3035负光刻胶,先将旋涂速度设定为500rpm并持续11s,再将旋涂速度调整为2000rpm并持续30s;
[0034]
前烘时,烘烤温度为95℃,前烘时间为15min;
[0035]
曝光时,曝光光源为紫外光,曝光时间为4s,曝光能量为250mj/cm2;
[0036]
后烘时,在烘烤温度为65℃下烘烤1min,在烘烤温度为95℃下烘烤5min;
[0037]
显影时,所用显影液为su
‑
8显影液。
[0038]
所述步骤s1和步骤s2中,固化是采用加热板进行的,加热温度为80℃,加热时间为4h。
[0039]
所述步骤s1中,填充孔是采用穿孔器钻设而成的。
[0040]
所述步骤s1和步骤s2中,pdms由弹性体基体与固化剂按质量比10:1混合而成。
[0041]
所述步骤s3中,采用等离子体将柔性上基板的下表面和柔性下基板的上表面粘合在一起。
[0042]
所述步骤s6中,真空填充法的具体步骤如下:将柔性上基板和柔性下基板置于真空室中20min;释放真空后,大气压力推动两滴液态金属流入叉指型微流控通道内形成液态金属叉指电极。
[0043]
工作时,如图15所示,液态金属叉指电极通过边缘效应和平行场产生电容。本发明根据液态金属叉指电极的相邻两个指部的间距的变化来区分拉力与正压力。本发明的液态
金属叉指电极处于同一平面且电极厚度仅为50μm,当受到拉力时相邻两个指部的间距很容易发生变化。如图16所示,当本发明受到拉力时,液态金属叉指电极的相邻两个指部的间距d0增大、电极厚度t0减小、每个指部的长度l0均减小、每个指部的宽度w0均增大,根据边缘电容、平行场电容、总电容计算公式可以得出电容随着拉力的增加而减小。如图17所示,当本发明受到正压力时,液态金属叉指电极的厚度t0变化可以忽略不计,泊松效应引起的相邻两个指部的间距d0变化可以忽略不计,根据边缘电容、平行场电容、总电容计算公式可以得出电容仅发生微小的变化。因此,对比本发明受到拉力和正压力所产生相邻两个指部的间距的变化以及这种变化所带来的电容的变化就能将拉力与正压力区分开来。换言之,本发明对施加于其上的正压力不敏感,由此能够区分拉力与正压力。同时,由于液态金属的导电性和流动性以及pdms的延展性,使得本发明能够检测高达100%的拉伸应变,灵敏度系数为
‑
0.3,且具有良好的耐久性。此外,本发明具有低滞后(<0.01)。如图18所示,本发明具有良好的延展性,可以进行扭转、弯曲、折叠成卷。如图19所示,本发明具有高度可伸缩性(100%),在0%到100%的拉伸应变范围内,电容变化几乎成线性行为,且灵敏度系数为
‑
0.3,因此可以应用于大的拉伸应变。如图20所示,本发明可应用于检测人体手指关节运动、腕关节运动、肘关节运动。
[0044]
为了验证本发明的优异性能,进行如下试验:
[0045]
如图21所示,以5mm/min和20mm/min两种拉伸速率对本发明进行拉伸,使其产生0%到50%的拉伸应变,由此获得应变
‑
电容变化曲线。该曲线表明:本发明在50%的拉伸应变范围内表现出低滞后,拉伸速率为20mm/min与拉伸速率为5mm/min时的电容变化相比,虽然拉伸速率为20mm/min时滞后增加,但电容的变化仅在0.01范围内。
[0046]
如图22所示,在30%的拉伸应变条件下对本发明进行反复拉伸,由此获得循环应变
‑
电容变化曲线。该曲线表明:本发明在连续循环动态载荷下表现出良好的稳定性和耐久性。
[0047]
如图23所示,通过在0%和20%的拉伸应变条件下施加0n、10n、15n、17.5n的正压力,同时获得正压力
‑
电容变化曲线。该曲线表明:在0%的拉伸应变情况下,在添加和移除砝码期间,电容不变,表明本发明在未拉伸条件下对正压力不敏感;在20%的拉伸应变情况下,在添加和移除砝码期间,电容仅变化0.004,表明本发明即使在拉伸条件下也对正压力不敏感。
[0048]
通过以上结果可以看出:本发明具有正压力不敏感特性,可以将拉力与正压力区分开来,并且可以应用于大的拉伸应变,同时具有良好的灵敏度、低滞后和耐久性。
[0049]
本发明有效解决了现有电容式应变传感器无法区分拉力与正压力、无法应用于大拉伸应变的问题,适用于人机界面、软机器人、电子皮肤等领域。
附图说明
[0050]
图1是本发明的立体结构示意图。
[0051]
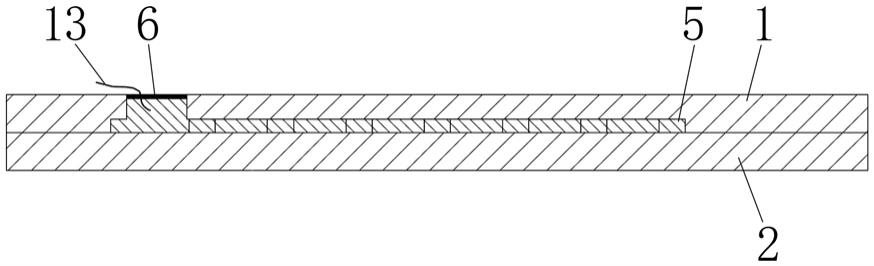
图2是本发明的剖面结构示意图一。
[0052]
图3是本发明的剖面结构示意图二。
[0053]
图4是本发明中步骤s1.1的示意图。
[0054]
图5是本发明中步骤s1.2的示意图。
[0055]
图6是本发明中步骤s1.3的示意图。
[0056]
图7是本发明中步骤s1.4的示意图。
[0057]
图8是本发明中步骤s2.1的示意图。
[0058]
图9是本发明中步骤s2.2的示意图。
[0059]
图10是本发明中步骤s2.3的示意图。
[0060]
图11是本发明中步骤s3的示意图。
[0061]
图12是本发明中步骤s4的示意图。
[0062]
图13是本发明中步骤s5的示意图。
[0063]
图14是本发明中步骤s6的示意图。
[0064]
图15是本发明的工作原理示意图一。
[0065]
图16是本发明的工作原理示意图二。
[0066]
图17是本发明的工作原理示意图三。
[0067]
图18是本发明具有良好延展性的示意图。
[0068]
图19是本发明在不同拉伸应变条件下的电容变化曲线示意图。
[0069]
图20是本发明应用于检测人体手指关节运动、腕关节运动、肘关节运动的示意图。
[0070]
图21是本发明在不同拉伸速率条件下的滞后示意图。
[0071]
图22是本发明在一定拉伸应变且快速拉伸条件下的电容变化示意图。
[0072]
图23是本发明在不同拉伸应变条件下施加正压力的电容变化示意图。
[0073]
图中:1
‑
柔性上基板,2
‑
柔性下基板,3
‑
叉指型微流控通道,4
‑
填充孔,5
‑
液态金属叉指电极,6
‑
粘接剂,7
‑
第一硅片,8
‑
叉指型凸起,9
‑
第一pdms层,10
‑
第二硅片,11
‑
第二pdms层,12
‑
液态金属,13
‑
导线。
具体实施方式
[0074]
一种正压力不敏感型叉指电容式应变传感器,包括柔性上基板1、柔性下基板2;柔性上基板1的下表面开设有叉指型微流控通道3,且叉指型微流控通道3的两个接线端与柔性上基板1的上表面之间各开设有一个上下贯通的填充孔4;柔性上基板1的下表面和柔性下基板2的上表面粘合在一起;叉指型微流控通道3内填充有液态金属叉指电极5;两个填充孔4的孔口均封堵有粘接剂6。
[0075]
柔性上基板1和柔性下基板2均呈长方形,二者的厚度均小于1mm,二者均采用pdms制成;两个填充孔4的直径均为1mm;液态金属叉指电极5的厚度为50μm、相邻两个指部的间距为200μm、每个指部的长度均为1cm、每个指部的宽度均为100μm;粘接剂6采用sil
‑
poxy硅胶粘接剂;液态金属叉指电极5的两个接线端各连接有一根导线13。
[0076]
一种正压力不敏感型叉指电容式应变传感器的制备方法(该方法用于制备本发明所述的一种正压力不敏感型叉指电容式应变传感器),该方法是采用如下步骤实现的:
[0077]
步骤s1:制备柔性上基板1;具体步骤如下:
[0078]
步骤s1.1:选取第一硅片7,然后采用光刻工艺在第一硅片7的上表面形成叉指型凸起8;
[0079]
步骤s1.2:在第一硅片7的上表面旋涂第一pdms层9,并保证第一pdms层9将叉指型凸起8全部覆盖,然后将第一pdms层9进行固化;
[0080]
步骤s1.3:将固化后的第一pdms层9进行剥离,由此得到下表面开设有叉指型微流控通道3的柔性上基板1;
[0081]
步骤s1.4:在叉指型微流控通道3的两个接线端与柔性上基板1的上表面之间各钻设一个上下贯通的填充孔4;
[0082]
步骤s2:制备柔性下基板2;具体步骤如下:
[0083]
步骤s2.1:选取第二硅片10;
[0084]
步骤s2.2:在第二硅片10的上表面旋涂第二pdms层11,然后将第二pdms层11进行固化;
[0085]
步骤s2.3:将固化后的第二pdms层11进行剥离,由此得到柔性下基板2;
[0086]
步骤s3:将柔性上基板1的下表面和柔性下基板2的上表面粘合在一起;
[0087]
步骤s4:将柔性上基板1和柔性下基板2切割成长方形;
[0088]
步骤s5:在两个填充孔4的孔口各放置一滴液态金属12;
[0089]
步骤s6:先采用真空填充法将两滴液态金属12填充入叉指型微流控通道3内形成液态金属叉指电极5,再在液态金属叉指电极5的两个接线端各插入一根导线13,然后采用粘接剂6将两个填充孔4的孔口进行封堵,由此完成制备。
[0090]
所述步骤s1中,光刻工艺的步骤依次为:涂胶、前烘、曝光、后烘、显影;
[0091]
涂胶时,所涂光刻胶为su
‑
8 3035负光刻胶,先将旋涂速度设定为500rpm并持续11s,再将旋涂速度调整为2000rpm并持续30s;
[0092]
前烘时,烘烤温度为95℃,前烘时间为15min;
[0093]
曝光时,曝光光源为紫外光,曝光时间为4s,曝光能量为250mj/cm2;
[0094]
后烘时,在烘烤温度为65℃下烘烤1min,在烘烤温度为95℃下烘烤5min;
[0095]
显影时,所用显影液为su
‑
8显影液。
[0096]
所述步骤s1和步骤s2中,固化是采用加热板进行的,加热温度为80℃,加热时间为4h。
[0097]
所述步骤s1中,填充孔4是采用穿孔器钻设而成的。
[0098]
所述步骤s1和步骤s2中,pdms由弹性体基体与固化剂按质量比10:1混合而成。
[0099]
所述步骤s3中,采用等离子体将柔性上基板1的下表面和柔性下基板2的上表面粘合在一起。
[0100]
所述步骤s6中,真空填充法的具体步骤如下:将柔性上基板1和柔性下基板2置于真空室中20min;释放真空后,大气压力推动两滴液态金属12流入叉指型微流控通道3内形成液态金属叉指电极5。
[0101]
虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式作出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1