雷达目标检测方法、装置、电子设备和存储介质与流程
本发明实施例涉及雷达检测,尤其涉及一种雷达目标检测方法、装置、电子设备和存储介质。
背景技术:
1、雷达发射电磁波进行目标检测时,在雷达与目标间会产生多次反射并且在不同目标之间也会产生多次反射,导致在雷达检测时会产生多径效应,发生实际回波频率和相位异常的现象,最终导致雷达检测结果的不准确性。
2、例如,目前在城市道路和高速道路上设有大量的大型金属广告牌、红绿灯、路灯、金属隔离带等电磁波强反射体,这些强反射体非常容易造成多径效应,当雷达检测目标靠近这些强反射体时因为多次反射会在检测目标后方位置处产生虚假目标,影响雷达的检测性能,且多径效应产生的虚假目标多数情况往往没有直接的规律可循,增加了雷达算法端对于多径效应问题处理的难度。
技术实现思路
1、本发明实施例提供一种雷达目标检测方法、装置、电子设备和存储介质,提高了雷达检测结果的准确性,并且降低了雷达算法端对于多径效应问题处理的难度。
2、第一方面,本发明实施例提供了一种雷达目标检测方法,由配置图像采集装置的雷达设备执行,包括:
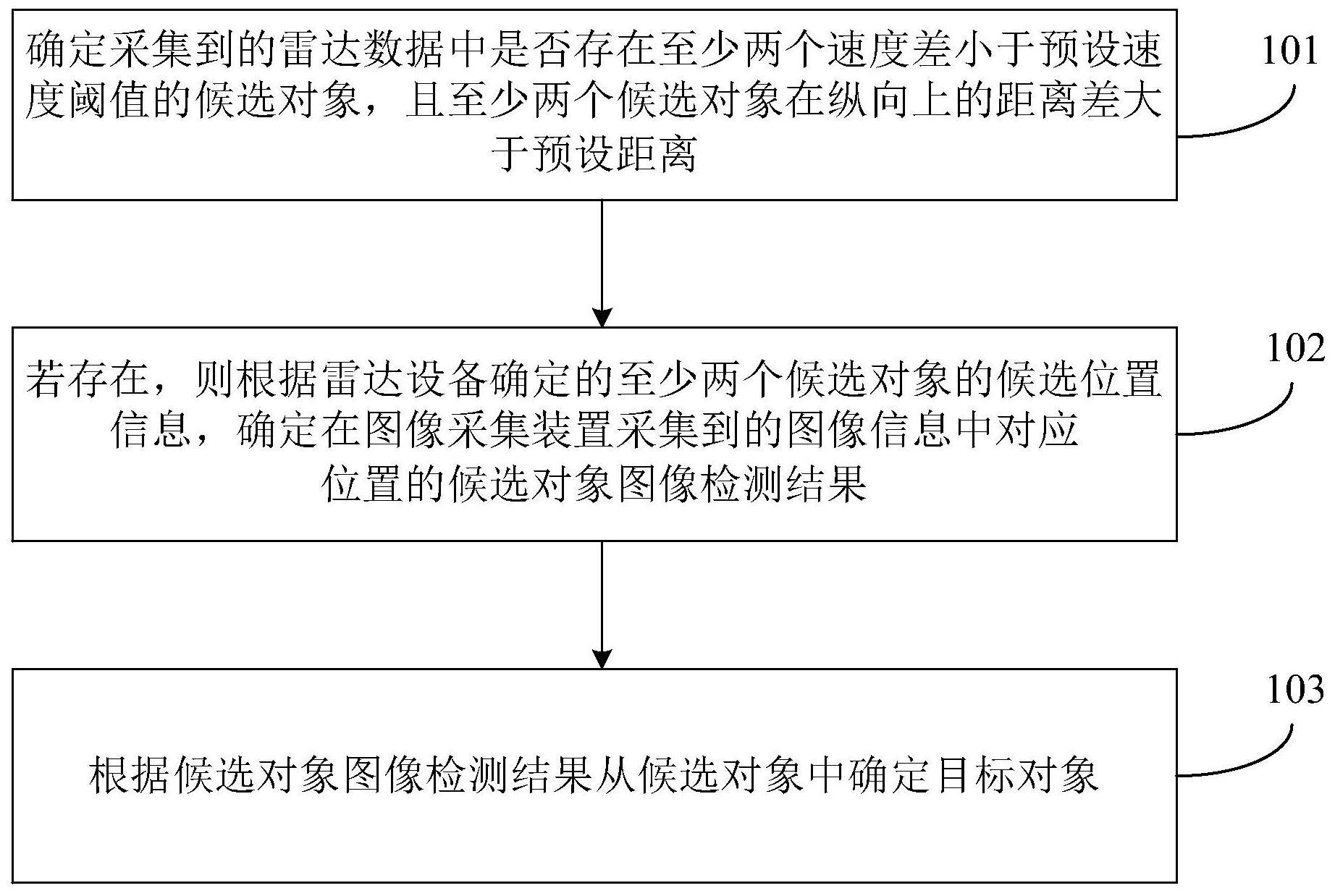
3、确定采集到的雷达数据中是否存在至少两个速度差小于预设速度阈值的候选对象,且至少两个候选对象在纵向上的距离差大于预设距离;
4、若存在,则根据所述雷达设备确定的所述至少两个候选对象的候选位置信息,确定在所述图像采集装置采集到的图像信息中对应位置的候选对象图像检测结果;
5、根据所述候选对象图像检测结果从所述候选对象中确定目标对象。
6、第二方面,本发明实施例还提供了一种雷达目标检测装置,由配置图像采集装置的雷达设备执行,包括:
7、候选对象模块,用于确定采集到的雷达数据中是否存在至少两个速度差小于预设速度阈值的候选对象,且至少两个候选对象在纵向上的距离差大于预设距离;
8、图像检测模块,用于若存在,则根据所述雷达设备确定的所述至少两个候选对象的候选位置信息,确定在所述图像采集装置采集到的图像信息中对应位置的候选对象图像检测结果;
9、目标对象确定模块,用于根据所述候选对象图像检测结果从所述候选对象中确定目标对象。
10、第三方面,本发明实施例还提供了一种电子设备,包括:
11、一个或多个处理器;
12、存储装置,用于存储一个或多个程序,
13、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如本发明任一实施例所述的雷达目标检测方法。
14、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明任一实施例所述的雷达目标检测方法。
15、本发明实施例确定采集到的雷达数据中是否存在至少两个速度差小于预设速度阈值的候选对象,且至少两个候选对象在纵向上的距离差大于预设距离;若存在,则根据雷达设备确定的至少两个候选对象的候选位置信息,确定在图像采集装置采集到的图像信息中对应位置的候选对象图像检测结果;根据候选对象图像检测结果从候选对象中确定目标对象。本发明实施例通过雷达加图像采集设备的方式对多径效应产生的虚假目标进行剔除,提高了雷达检测结果的准确性,并且降低了雷达算法端对于多径效应问题处理的难度,同时利用两种传感器各自的优势取长补短,提供更为全面的道路数字化信息。
技术特征:
1.一种雷达目标检测方法,其特征在于,由配置图像采集装置的雷达设备执行,包括:
2.根据权利要求1所述的方法,其特征在于,根据所述候选对象图像检测结果从所述候选对象中确定目标对象,包括:
3.根据权利要求1所述的方法,其特征在于,根据所述候选对象图像检测结果从所述候选对象中确定目标对象,包括:
4.根据权利要求1所述的方法,其特征在于,在根据所述雷达设备确定的所述至少两个候选对象的候选位置信息,确定在所述图像采集装置采集到的图像信息中对应位置的候选对象图像检测结果之前,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,确定所述雷达设备和所述图像采集装置对所述候选对象的类型检测结果,包括:
6.根据权利要求4所述的方法,其特征在于,在确定所述雷达设备对所述候选对象的类型检测结果之后,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,在确定采集到的雷达数据中是否存在至少两个速度差小于预设速度阈值的候选对象,且至少两个候选对象在纵向上的距离差大于预设距离之前,所述方法还包括:
8.一种雷达目标检测装置,其特征在于,由配置图像采集装置的雷达设备执行,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一所述的雷达目标检测方法。
技术总结
本发明实施例公开了一种雷达目标检测方法、装置、电子设备和存储介质。该雷达目标检测方法包括:确定采集到的雷达数据中是否存在至少两个速度差小于预设速度阈值的候选对象,且至少两个候选对象在纵向上的距离差大于预设距离;若存在,则根据所述雷达设备确定的所述至少两个候选对象的候选位置信息,确定在所述图像采集装置采集到的图像信息中对应位置的候选对象图像检测结果;根据所述候选对象图像检测结果从所述候选对象中确定目标对象。本发明实施例提高了雷达检测结果的准确性,并且降低了雷达算法端对于多径效应问题处理的难度。
技术研发人员:顾逸,孙效骥
受保护的技术使用者:浙江宇视科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!