一种输电线路净空距离无人机航测方法及系统与流程
1.本发明涉及一种无人机航测的技术领域,尤其涉及输电线路净空距离无人机航测方法及系统。
背景技术:
2.随着电网规模的不断扩大,传统地面观测方式存在测量过程繁琐、仪器沉重不便于携带、受环境影响严重、需要人力翻山越岭观测效率低等问题,难以应对日益扩大的电网规模。无人机具有良好的观测视野、操控灵活高效、节省人力的特点,能够有效的解决传统地面观测方法观测效率低的问题。近年来rtk(real-time kinematic,实时动态载波相位差分技术)技术在无人机领域应用的不断成熟实现了厘米级的定位精度,为无人机航测技术在电网运维工作中的应用奠定了基础。
3.现有点云等无人机航测技术通过不同位置多角度发出并接收扫描激光雷达信号,建立三维模型还原扫描范围内物体轮廓,在三维模型内测量所需数据,该方案三维模型构建成本高,难以灵活运用在输电线路的测量过作中。
技术实现要素:
4.鉴于此,本发明提出一种输电线路净空距离航测方法,从输电专业自身需求出发,根据净空距离自身空间结构特点,制定观测方案应用于无人机飞控平台上,具有测量成本低,灵活性高,测量准确的优势,更好的应用于输电线路测量工作中。
5.为解决上述问题,本发明提供一种输电线路净空距离无人机航测方法,包括:
6.启动无人机,根据计算需求飞至特定观测点,采集位置信息,计算两点水平与垂直方向距离,计算上下目标净空距离;
7.所述特定观测点包括平视下方目标、俯视下方目标、平视上方目标、俯视上方目标四个观测点;
8.所述采集位置信息包括纬度、经度、绝对海拔高度、镜头pitch轴观测角度四项数据。
9.所述飞至特定观测点,采集位置信息包括:
10.平视下方目标为无人机云台pitch轴角度为0,镜头中心对准下方目标,此时无人机云台与目标保持同一海拔高度,记录纬度la1、经度lo1、绝对海拔高度al1、pitch轴角度0;
11.俯视下方目标为保持无人机水平方向位置与角度不变,垂直提升无人机高度,飞至量程范围内任意距离均可,调整云台pitch轴角度,将镜头中心对准下方目标,记录纬度la2、经度lo2、绝对海拔高度al2、pitch轴角度α;
12.平视上方目标为保持无人机水平方向位置与角度不变,调整无人机垂直高度,无人机镜头pitch轴角度调至0,记录纬度la3、经度lo3、绝对海拔高度al3、pitch轴角度0;
13.俯视上方目标为保持无人机水平方向位置与角度不变,垂直提升无人机高度,飞至量程范围内任意距离均可,调整云台pitch轴角度,将镜头中心对准上方目标,记录纬度
la4、经度lo4、绝对海拔高度al4、pitch轴角度β。
14.所述计算两点水平与垂直方向距离包括:
15.根据平视下方目标与俯视下方目标高度差与俯视下方目标pitch轴角度,计算平视下方目标观测点与下方目标距离l1,计算公式为
16.l1=(al
2-al1)/tanα
17.根据平视上方目标与俯视上方目标高度差与俯视上方目标pitch轴角度,计算平视上方目标观测点与上方目标距离l2,计算公式为
18.l2=(al
4-al3)/tanβ
19.计算上方与下方目标水平距离l3为
20.l3=l
2-l121.其中,l3》0,说明下方目标距观测点较近;l3=0,说明上方与下方目标位于同一垂直线上;l3《0,说明上方目标距观测点较近;
22.上下目标两点垂直距离为
23.h=al
3-al1。
24.所述计算上下目标净空距离包括:
25.根据空间几何关系,计算得出目标两点净空距离l为
[0026][0027]
上述输电线路净空距离无人机航测系统,包括:数据采集模块、数据运算模块、人机交互操控界面;
[0028]
所述数据采集模块,用于采集无人机自身定位系统所定位得出的经度、纬度、绝对海拔高度、pitch轴云台角度;
[0029]
所述数据运算模块,用于执行所述净空距离、水平距离、垂直距离算法;
[0030]
所述人机交互操控界面,用于接收采集数据、运算、等指令,显示采集与运算结果。
[0031]
本发明的工作原理及优点效果如下:
[0032]
利用无人机灵活的空中飞行能力以及rtk技术精准的定位功能,记录无人机云台的位置信息,在平视时所记录云台海拔高度即为观测目标海拔高度,俯视时利用高差与观测角度计算观测目标距离,最终根据观测点与无人机云台间的空间位置关系计算得出输电线路净空距离。
[0033]
该方案应用无人机避免了传统地面观测技术观测效率低、观测视角受限、耗费人力的问题,无需建立三维模型节省测量成本,具有极高的灵活性。
附图说明
[0034]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0035]
图1为本发明公开输电线路净空距离无人机航测系统组成结构图;
[0036]
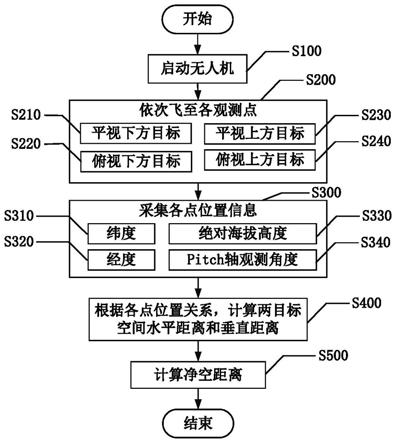
图2为本发明公开输电线路净空距离无人机航测系统测量流程图;
[0037]
图3为本发明公开输电线路净空距离无人机航测系统净空距离算法流程图:
[0038]
图4为本发明公开输电线路净空距离无人机航测系统测量示意图。
具体实施方式
[0039]
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置的例子。
[0040]
参见图1为一种输电线路净空距离无人机航测系统组成结构图,该航测系统主要由数据采集模块1、数据传输模块2、数据运算模块3、人机交互界面4组成。其中,数据采集模块1用于操作人员按照本专利提出方法采集无人机云台的位置信息,包括纬度、经度、绝对海拔高度、云台pitch轴角度;数据传输模块2负责将采集到的云台位置信息以及镜头拍摄拍摄图像实时传输回无人机飞控上进行记录;数据运算模块3负责将传输到飞控上的数据按照本专利提出算法计算净空距离;人机交互界面4用于操控人员向系统发送采集位置信息与运算指令、实时显示采集数据与镜头拍摄画面等功能。
[0041]
上述输电线路净空距离无人机航测系统的总体测量过程参见图2:
[0042]
启动无人机(s100),飞至特定观测点(s200),采集位置信息(s300),利用本发明净空距离算法计算目标两点净空距离(s400),计算两点水平于垂直方向距离(s500)。其中,所述特定观测点(s200)包括平视下方目标(s210)、俯视下方目标(s220)、平视上方目标(s230)、俯视上方目标(s240)四个观测点。所述采集位置信息包括纬度(s310)、经度(s320)、绝对海拔高度(s330)、镜头pitch轴观测角度(s340)四项数据。
[0043]
上述输电线路净空距离无人机航测系统的具体工作过程参见图3、图4:
[0044]
步骤s310;启动无人机与飞控进入航测系统,起飞无人机飞至观测目标附近。根据实时图传的云台镜头图像,记录平视下方目标(s210)位置信息,镜头方向与导线垂直,云台pitch轴角度为0,镜头中心对准下方目标,此时为平视下方目标(s210)观测点,记录纬度la1、经度lo1、绝对海拔高度al1、pitch轴角度0。
[0045]
步骤s320:保持无人机方向、水平方向上位置不变,垂直起飞无人机至一定高度,高度与距下方目标距离相近为宜,调整云台pitch轴角度,将镜头中心对准下方目标,此时为俯视下方目标(s220)观测点,记录纬度la2、经度lo2、绝对海拔高度al2、pitch轴角度α。
[0046]
步骤s330:保持无人机方向、水平方向上位置不变,云台pitch轴角度调0,调整无人机高度,镜头中心对准上方目标,此时即为平视上方目标(s230)观测点,记录纬度la3、经度lo3、绝对海拔高度al3、pitch轴角度0。
[0047]
步骤s340:保持无人机方向、水平方向上位置不变,垂直起飞无人机至一定高度,高度与距上方目标距离相近为宜,调整云台pitch轴角度,将镜头中心对准上方目标,此时即为俯视上方目标(s240)观测点,记录纬度la4、经度lo4、绝对海拔高度al4、pitch轴角度β。
[0048]
步骤s410:根据平视下方目标(s210)观测点与俯视下方目标(s220)观测点海拔高度差以及下方目标观测角度α,计算无人机平视时距下方目标水平距离l1为
[0049]
l1=(al
2-al1)/tanα
[0050]
步骤s420:根据平视上方目标(s230)观测点与俯视上方目标(s240)观测点海拔高度差以及上方目标观测角度α,计算无人机平视时距上方目标水平距离l2为
[0051]
l2=(al
4-al3)/tanβ
[0052]
步骤s430:根据无人机平视时距下方目标距离l1与无人机平视时距上方目标水平距离 l2,计算上方与下方目标水平距离l3为
[0053]
l3=l
2-l1[0054]
其中,l3》0,说明下方目标距观测点较近;l3=0,说明上方与下方目标位于同一垂直线上;l3《0,说明上方目标距观测点较近;
[0055]
步骤s440:根据平视上方目标(s230)观测点与平视下方目标(s210)观测点海拔高度差,计算上方与下方目标垂直距离h为
[0056]
h=al
3-al1[0057]
步骤s450:根据上下目标水平与垂直方向距离计算净空距离为
[0058][0059]
一种存储介质,用于存储输电线路净空距离无人机航测计算程序,所述输电线路净空距离无人机航测计算程序被处理器执行时实现如权利要求1-5中任一项所述输电线路净空距离无人机航测计算方法。
[0060]
此外,本发明根据所提算法制作能够应用于无人机唯恐平台上的航测app,建立输电线路净空距离无人机航测系统,实现航测数据的实时采集实时测量。该系统操作灵活,测量效率高、测量成本低,有效地解决了现有输电线路测量方法所面临的问题。
[0061]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由权利要求指出。
[0062]
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1