一种通过激光线扫描建立缆索表面形态的方法
1.本发明涉及缆索检测领域,具体涉及一种通过激光线扫描建立缆索表面形态的方法。
背景技术:
2.目前对缆索表观损伤的检测方法大致分为人工检测法、激光扫描法、机器学习神经网络检测法、机器视觉缺陷检测法,人工检测法是通过人眼对缆索表面进行检查,耗时耗力,有安全隐患,且对缆索破损有主观性,容易漏检或误检,效率不高。
3.激光扫描法是对缆索表面缺陷的自动检测方法,采集原理是通过发射激光束,接收反射的激光,测量其中的时间和距离,存在检测缺陷不直观,对三维空间进行处理分析时间长,且系统的构成体积较大,设备昂贵,难以推广应用。
4.机器学习神经网络检测方法主要分为bp神经网络、scg神经网络、rbf神经网络,主要是通过数值模拟建立有限元分析模型,通过输入缆索的特定参数及荷载工况,运用神经网络算法来评估发生损伤的位置,既然是机器学习,需要大量的样本数据进行训练,训练数据时间较长;且在不同程度的损伤情况下,识别精度不同,稳定性较弱;在处理数据时,计算的迭代次数多,工作量大,现有的算法还不是很成熟等局限。
5.以上方式存在效率低下、成本高、智能化程度不足等局限。
技术实现要素:
6.针对现有技术中的上述不足,本发明提供的一种通过激光线扫描建立缆索表面形态的方法解决了现有检测方法效率低的问题。
7.为了达到上述发明目的,本发明采用的技术方案为:
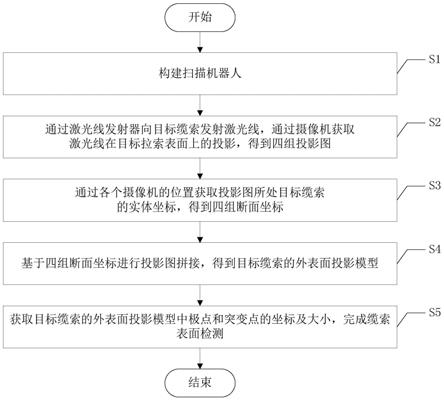
8.提供一种通过激光线扫描建立缆索表面形态的方法,其包括以下步骤:
9.s1、构建扫描机器人:在缆索攀爬车的内侧四面各安装一个激光线发射器,使所有激光线发射器在同一平面且与目标缆索垂直;在缆索攀爬车内侧四个面各安装一个摄像机,使所有摄像机在同一平面且与激光发射器所在平面平行;所有摄像机的视线与目标缆索的夹角均相等;
10.s2、通过激光线发射器向目标缆索发射激光线,通过摄像机获取激光线在目标缆索表面上的投影,得到四组投影图;
11.s3、通过各个摄像机的位置获取投影图所处目标缆索的实体坐标,得到四组断面坐标;
12.s4、基于四组断面坐标进行投影图拼接,得到目标缆索的外表面投影模型;
13.s5、获取目标缆索的外表面投影模型中极点和突变点的坐标及大小,完成缆索表面检测。
14.进一步地,步骤s1中相邻两个激光线发射器之间的间距相等,每个激光线发射器所发射的激光线投影在目标缆索上的区域为目标缆索断面圆环的四分之一长度。
15.进一步地,步骤s3的具体方法为:
16.以扫描机器人中轴线方向为z轴、以激光线发射器方向为x轴构建空间坐标系,根据摄像机的位置获取投影图所处目标缆索的z轴坐标z
*
;根据公式:
[0017][0018]
获取投影图任一目标点所处目标缆索的实体坐标(x
*
,y
*
),进而得到投影图任一目标点所处目标缆索的实体坐标(x
*
,y
*
,z
*
);其中cot表示余切函数;α为目标点与摄像机光心连线和摄像机视域中轴线夹角;csc表示余割函数;θ表示摄像机视域中轴线与激光平面夹角;(u,v)为目标点在图像坐标系中的坐标;l为摄像机光心到激光平面的距离;cos为余弦函数;f为摄像机对准目标点时的焦距。
[0019]
本发明的有益效果为:对缆索发射激光线,并采集激光线在缆索表观上的投影,再通过计算摄像系统底片坐标进行转换,即可得到缆索表观实体的坐标,进而建立三维模型或者点云模型,如果缆索表观没有破损的话,激光线在缆索上的投影应该是光滑连续的曲线,若有缺陷,会在缆索某点处有缺角,激光线的投影将会有极点或突变点,通过三维模型或者点云模型中极点和突变点的坐标即可知道缆索表面破损的位置,通过破损位置的坐标还可以计算得到破损面积的大小,实现缆索的快速检测。
附图说明
[0020]
图1为本方法的流程示意图;
[0021]
图2为扫描机器人与缆索的相对位置示意图;
[0022]
图3为坐标系转换示意图;
[0023]
图4为无破损的缆索的投影示意图;
[0024]
图5为存在破损的缆索的投影示意图;
具体实施方式
[0025]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
[0026]
如图1和图2所示,该通过激光线扫描建立缆索表面形态的方法包括以下步骤:
[0027]
s1、构建扫描机器人:在缆索攀爬车的内侧四面各安装一个激光线发射器,使所有激光线发射器在同一平面且与目标缆索(缆索也即拉索)垂直;在缆索攀爬车内侧四个面各安装一个摄像机,使所有摄像机在同一平面且与激光发射器所在平面平行;所有摄像机的视线与目标缆索的夹角均相等;
[0028]
s2、通过激光线发射器向目标缆索发射激光线,通过摄像机获取激光线在目标缆索表面上的投影,得到四组投影图;
[0029]
s3、通过各个摄像机的位置获取投影图所处目标缆索的实体坐标,得到四组断面坐标;
[0030]
s4、基于四组断面坐标进行投影图拼接,得到目标缆索的外表面投影模型;
[0031]
s5、获取目标缆索的外表面投影模型中极点和突变点的坐标及大小,完成缆索表面检测。
[0032]
步骤s1中相邻两个激光线发射器之间的间距相等,每个激光线发射器所发射的激光线投影在目标缆索上的区域为目标缆索断面圆环的四分之一长度。
[0033]
步骤s3的具体方法为:如图3所示,以扫描机器人中轴线方向为z轴、以激光线发射器方向为x轴构建空间坐标系,根据摄像机的位置获取投影图所处目标缆索的z轴坐标z
*
;根据公式:
[0034][0035]
获取投影图任一目标点所处目标缆索的实体坐标(x
*
,y
*
),进而得到投影图任一目标点所处目标缆索的实体坐标(x
*
,y
*
,z
*
);其中cot表示余切函数;α为目标点与摄像机光心连线和摄像机视域中轴线夹角;csc表示余割函数;θ表示摄像机视域中轴线与激光平面夹角;(u,v)为目标点在图像坐标系中的坐标;l为摄像机光心到激光平面的距离;cos为余弦函数;f为摄像机对准目标点时的焦距。
[0036]
在本发明的一个实施例中,激光线发射器和摄像机构成摄像系统,摄像系统通过用激光线在缆索表观的投影来代替缆索断面外围的实际缺陷情况,因此缆索每一层断面在摄像系统为一层激光线,扫描的结果是由若干个激光曲线断面连续组成的缆索外侧图;运用数学方法,扫面完后对成像进行坐标处理,通过坐标转换即可将摄像系统采集的每一个断面构建成缆索的实际外观模型。摄像系统移动扫描的路径为缆索的轴线,即为光滑的曲线。需要将摄像系统扫描的断面根据缆索的线形(轴线,可通过拍照直接提取)串联,找到缆索的中心线或者每个断面的形心位置,由于摄像系统一直在移动,此坐标系也在一直变化,通过坐标转换与融合便可以得到整体立体模型。
[0037]
综上所述,本发明对缆索发射激光线,并采集激光线在缆索表观上的投影,再通过计算摄像系统底片坐标进行转换,即可得到缆索表观实体的坐标,进而建立三维模型或者点云模型,如图4所示,如果缆索表观没有破损的话,激光线在缆索上的投影应该是光滑连续的曲线,如图5所示,若有缺陷,会在缆索某点处有缺角,激光线的投影将会有极点或突变点,通过三维模型或者点云模型中极点和突变点的坐标即可知道缆索表面破损的位置,通过破损位置的坐标还可以计算得到破损面积的大小,实现缆索的快速检测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1