一种全自动光学精密测量设备的制作方法
1.本发明涉及光学精密测量技术领域,尤其涉及一种全自动光学精密测量设备。
背景技术:
2.近几年,随着科技的发展,人们发明了一种新的测量技术:一键式测量仪,其采用双远心光学镜头,结合高精度图像分析算法,并融入一键闪测原理,只需按一下启动键,仪器即可根据工件的形状自动定位测量对象、匹配模板、测量评价、报表生成,等等;但是现有的一键式测量仪在使用时,只能将工件放置在设备上静止进行图像采集,图像采集完成后,还需要取放工件,使得工作效率较低,不适用于工件的批量测量,而一些在流水线的传送带上进行测量的设备,工件与摄像头之间为动态测量,摄像头拍摄移动的工件,会影响测量精度。
3.因此,有必要提供一种全自动光学精密测量设备解决上述技术问题。
技术实现要素:
4.为解决上述技术问题,本发明是提供一种全自动光学精密测量设备。
5.本发明提供的一种全自动光学精密测量设备,包括:机架、导光板、升降机构、随动机构、定位机构、led灯、安装板、导向轨道、摄像头,所述机架内壁通过轴承转动连接有输送辊,两个所述输送辊外侧传动连接有传送带,所述传送带为透明材质构成,所述机架一侧固定有第一电机,且第一电机的输出端与一个所述输送辊固定连接,所述导光板固定在机架内壁,且导光板位于传送带内壁并与传送带内壁顶部滑动接触,所述安装板固定在机架内壁,且安装板位于导光板下方,所述led灯固定在安装板上表面,且led灯与导光板相配合,所述升降机构对称安装在机架两侧,两个所述升降机构顶部固定有顶板,所述升降机构包括滑槽、升降板、固定框、螺纹杆、升降块、导杆和第三电机,所述机架两侧对称开设有滑槽,所述滑槽内壁滑动连接有升降板,所述机架外侧固定有固定框,所述固定框内壁中部通过轴承转动连接有螺纹杆,所述升降板靠近固定框的一侧底部固定有升降块,所述升降块中部开设有螺纹孔,且升降块与螺纹杆螺纹连接,所述固定框内壁对称固定有导杆,且导杆与升降块滑动连接,所述固定框顶部固定有第三电机,且第三电机的输出端与螺纹杆固定连接,所述顶板与两个升降板固定连接,所述随动机构安装在顶板底部,所述随动机构的两个动端固定有伸缩杆机构,所述导向轨道固定在两个升降板之间,且导向轨道与伸缩杆机构相配合,所述导向轨道由两个水平段和两个倾斜段组成,两个水平段设有高低差,并通过两个倾斜段平滑过渡连接,所述摄像头安装在伸缩杆机构的底部,所述定位机构安装在机架一端。
6.优选的,所述随动机构包括同步带轮、同步皮带和第二电机,所述顶板两端通过轴承对称转动连接有同步带轮,两个所述同步带轮传动连接有同步皮带,所述顶板顶部固定有第二电机,所述第二电机的输出端与一个所述同步带轮固定连接。
7.优选的,所述伸缩杆机构包括外套筒、滑杆、连接杆、导向槽和驱动杆,所述同步皮
带外侧对称固定有外套筒,所述外套筒内壁滑动连接有滑杆,所述滑杆底部固定有连接杆,且摄像头与连接杆固定连接,所述外套筒外侧开设有导向槽,所述滑杆靠近导向槽的一端固定有驱动杆,所述驱动杆一端穿过导向槽与导向轨道内壁滑动连接。
8.优选的,所述驱动杆靠近导向轨道的一端通过轴承转动连接有第一滚轮,且第一滚轮与导向轨道内壁滚动连接。
9.优选的,所述定位机构包括固定杆、气缸、挡板和限位块,所述机架内壁一端固定有固定杆,所述固定杆中部固定有气缸,所述气缸的输出端固定有挡板,所述挡板两端对称固定有限位块,所述机架内壁靠近限位块的一端对称开设有限位槽,且限位块与限位槽滑动连接。
10.优选的,所述顶板下表面固定有滑动轨道,所述滑动轨道的截面呈l形设置,所述外套筒顶部固定有固定座,所述固定座一侧通过轴承转动连接有第二滚轮,且第二滚轮与滑动轨道内壁滚动连接。
11.优选的,所述机架内壁靠近挡板的一端对称铰接有导向板,所述机架靠近导向板的一端对称开设有凹槽,所述凹槽内壁铰接有第一螺纹套筒,所述第一螺纹套筒内壁螺纹连接有第一丝杆,所述第一丝杆一端通过轴承转动连接有铰座,且铰座与导向板铰接,所述第一丝杆远离铰座的一端固定有手轮。
12.优选的,所述第一电机、第二电机和第三电机均为一种减速电机。
13.优选的,所述传送带两端均设有限位齿,所述输送辊两端对称开设有与限位槽相配合的齿槽,且限位齿与齿槽啮合连接。
14.优选的,所述机架底部对称固定有调节支脚,所述调节支脚包括第二螺纹套筒、螺栓和防滑垫,所述机架底部对称固定有第二螺纹套筒,所述第二螺纹套筒内壁螺纹连接有螺栓,所述螺栓底部转动安装有防滑垫。
15.与相关技术相比较,本发明提供的全自动光学精密测量设备具有如下有益效果:本发明提供全自动光学精密测量设备:1、在使用时,工件通过机械手放置到传送带上,并被挡板阻挡,然后通过气缸带动挡板升起,使得工件向前输送,与此同时,第二电机转动带动带动同步带轮转动,进而可带动同步皮带传动,使得同步皮带上的伸缩杆机构运动,进而可带动摄像头进行运动,使得摄像头在工件上方跟随工件一起同步向前运动,使得工件相对于摄像头为静止状态,从而使得摄像头在对工件进行图像采集时,可以更加精准,摄像头有两个,两个伸缩杆机构对称固定在同步皮带上,使得同步皮带传动时,两个伸缩杆机构会反向运动,使得其中一个摄像头在跟随工件进行运动时,另一个摄像头在向下一个工件的方向运动,在第一个摄像头刚好对工件进行测量完成后,第二个摄像头刚好移动至第二个工件的正上方,继续跟随第二个工件进行测量,从而使得两个摄像头可无缝交替对工件进行测量,大大提高工作效率和测量精度,此装置可在工件进行输送过程中,使摄像头跟随工件进行随动采集图像,提高工作效率和测量精度;2、伸缩杆机构与导向轨道相配合,导向轨道上的两个水平段设有高低差,使得伸缩杆机构上的驱动杆与导向轨道内壁滑动,且两个伸缩杆机构上的驱动杆分别在两个水平段上,其中,跟随工件移动的伸缩杆机构上的驱动杆始终在较低的水平段上,而对工件测量完成后,摄像头往回移动复位,使得驱动杆在倾斜段内导向上升,进而可带动滑杆进行升
起,进而带动复位的摄像头升起,避开正在跟随工件测量的摄像头,使得两个摄像头交替在对工件测量时,高度和位置始终保持一致,提高测量精度;3、通过第三电机转动带动螺纹杆转动,进而可带动升降块升起,从而可带动升降板升降,调节摄像头的高度,从而可适用不同高度的工件的测量;4、在对工件进行测量的过程中,传送带不会骤然停止或启动,使得工件放置的稳定性提高,避免较高的工件因惯性而倾倒的现象。
附图说明
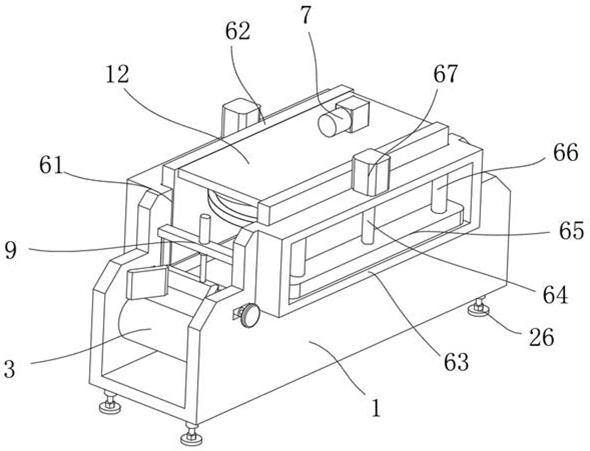
16.图1为本发明提供的整体结构示意图;图2为本发明提供的传送带结构示意图;图3为本发明提供的导光板结构示意图;图4为本发明提供的定位机构结构示意图;图5为图4中的a处放大图;图6为本发明提供的第二电机结构示意图;图7为本发明提供的同步皮带结构示意图;图8为本发明提供的随动机构结构示意图;图9为本发明提供的滑杆结构示意图;图10为本发明提供的导向轨道结构示意图;图11为图3中的b处放大图。
17.图中标号:1、机架;2、输送辊;3、传送带;4、第一电机;5、导光板;6、升降机构;61、滑槽;62、升降板;63、固定框;64、螺纹杆;65、升降块;66、导杆;67、第三电机;7、随动机构;71、同步带轮;72、同步皮带;73、第二电机;8、伸缩杆机构;81、外套筒;82、滑杆;83、连接杆;84、导向槽;85、驱动杆;9、定位机构;91、固定杆;92、气缸;93、挡板;94、限位块;10、led灯;11、安装板;12、顶板;13、导向轨道;131、水平段;132、倾斜段;14、摄像头;15、第一滚轮;16、滑动轨道;17、固定座;18、第二滚轮;19、导向板;20、第一螺纹套筒;21、第一丝杆;22、铰座;23、手轮;24、限位齿;25、齿槽;26、调节支脚;261、第二螺纹套筒;262、螺栓;263防滑垫。
具体实施方式
18.下面结合附图和实施方式对本发明作进一步说明。
19.在具体实施过程中,如图1、图2、图3、图6和图8所示,一种全自动光学精密测量设备,包括:机架1、导光板5、升降机构6、随动机构7、定位机构9、led灯10、安装板11、导向轨道13、摄像头14,所述机架1内壁通过轴承转动连接有输送辊2,两个所述输送辊2外侧传动连接有传送带3,所述传送带3为透明材质构成,所述机架1一侧固定有第一电机4,且第一电机4的输出端与一个所述输送辊2固定连接,所述导光板5固定在机架1内壁,且导光板5位于传送带3内壁并与传送带3内壁顶部滑动接触,所述安装板11固定在机架1内壁,且安装板11位于导光板5下方,所述led灯10固定在安装板11上表面,且led灯10与导光板5相配合,所述升降机构6对称安装在机架1两侧,两个所述升降机构6顶部固定有顶板12,所述随动机构7安装在顶板12底部,所述随动机构7的两个动端固定有伸缩杆机构8,所述摄像头14安装在伸缩杆机构8的底部,所述定位机构9安装在机架1一端,在使用时,工件通过机械手放置到传
送带3上,并被挡板93阻挡,然后通过气缸92带动挡板93升起,使得工件向前输送,与此同时,第二电机73转动带动带动同步带轮71转动,进而可带动同步皮带72传动,使得同步皮带72上的伸缩杆机构8运动,进而可带动摄像头14进行运动,使得摄像头14在工件上方跟随工件一起同步向前运动,使得工件相对于摄像头14为静止状态,从而使得摄像头14在对工件进行图像采集时,可以更加精准,摄像头14有两个,两个伸缩杆机构8对称固定在同步皮带72上,使得同步皮带72传动时,两个伸缩杆机构8会反向运动,使得其中一个摄像头14在跟随工件进行运动时,另一个摄像头14在向下一个工件的方向运动,在第一个摄像头14刚好对工件进行测量完成后,第二个摄像头14刚好移动至第二个工件的正上方,继续跟随第二个工件进行测量,从而使得两个摄像头14可无缝交替对工件进行测量,大大提高工作效率和测量精度。
20.参考图1所示,所述升降机构6包括滑槽61、升降板62、固定框63、螺纹杆64、升降块65、导杆66和第三电机67,所述机架1两侧对称开设有滑槽61,所述滑槽61内壁滑动连接有升降板62,所述机架1外侧固定有固定框63,所述固定框63内壁中部通过轴承转动连接有螺纹杆64,所述升降板62靠近固定框63的一侧底部固定有升降块65,所述升降块65中部开设有螺纹孔,且升降块65与螺纹杆64螺纹连接,所述固定框63内壁对称固定有导杆66,且导杆66与升降块65滑动连接,所述固定框63顶部固定有第三电机67,且第三电机67的输出端与螺纹杆64固定连接,所述顶板12与两个升降板62固定连接,通过第三电机67转动带动螺纹杆64转动,进而可带动升降块65升起,从而可带动升降板62升降,调节摄像头14的高度,从而可适用不同高度的工件的测量。
21.参考图6、图7和图8所示,所述随动机构7包括同步带轮71、同步皮带72和第二电机73,所述顶板12两端通过轴承对称转动连接有同步带轮71,两个所述同步带轮71传动连接有同步皮带72,所述顶板12顶部固定有第二电机73,所述第二电机73的输出端与一个所述同步带轮71固定连接。
22.参考7、图8、图9和图10所示,所述导向轨道13固定在两个升降板62之间,且导向轨道13与伸缩杆机构8相配合,所述导向轨道13由两个水平段131和两个倾斜段132组成,两个水平段131设有高低差,并通过两个倾斜段132平滑过渡连接,所述伸缩杆机构8包括外套筒81、滑杆82、连接杆83、导向槽84和驱动杆85,所述同步皮带72外侧对称固定有外套筒81,所述外套筒81内壁滑动连接有滑杆82,所述滑杆82底部固定有连接杆83,且摄像头14与连接杆83固定连接,所述外套筒81外侧开设有导向槽84,所述滑杆82靠近导向槽84的一端固定有驱动杆85,所述驱动杆85一端穿过导向槽84与导向轨道13内壁滑动连接,所述驱动杆85靠近导向轨道13的一端通过轴承转动连接有第一滚轮15,且第一滚轮15与导向轨道13内壁滚动连接,伸缩杆机构8与导向轨道13相配合,导向轨道13上的两个水平段131设有高低差,使得伸缩杆机构8上的驱动杆85与导向轨道13内壁滑动,且两个伸缩杆机构8上的驱动杆85分别在两个水平段131上,其中,跟随工件移动的伸缩杆机构8上的驱动杆85始终在较低的水平段131上,而对工件测量完成后,摄像头14往回移动复位,使得驱动杆85在倾斜段132内导向上升,进而可带动滑杆82进行升起,进而带动复位的摄像头14升起,避开正在跟随工件测量的摄像头14,使得两个摄像头14交替在对工件测量时,高度和位置始终保持一致,提高测量精度。
23.参考图4所示,所述定位机构9包括固定杆91、气缸92、挡板93和限位块94,所述机
架1内壁一端固定有固定杆91,所述固定杆91中部固定有气缸92,所述气缸92的输出端固定有挡板93,所述挡板93两端对称固定有限位块94,所述机架1内壁靠近限位块94的一端对称开设有限位槽,且限位块94与限位槽滑动连接,通过气缸92带动挡板93升降,便于对工件进行遮挡,使得工件可以在一定距离内进行向前输送。
24.参考图7和图8所示,所述顶板12下表面固定有滑动轨道16,所述滑动轨道16的截面呈l形设置,所述外套筒81顶部固定有固定座17,所述固定座17一侧通过轴承转动连接有第二滚轮18,且第二滚轮18与滑动轨道16内壁滚动连接,便于对外套筒81进行限位,提高外套筒81滑动的稳定性。
25.参考图5所示,所述机架1内壁靠近挡板93的一端对称铰接有导向板19,所述机架1靠近导向板19的一端对称开设有凹槽,所述凹槽内壁铰接有第一螺纹套筒20,所述第一螺纹套筒20内壁螺纹连接有第一丝杆21,所述第一丝杆21一端通过轴承转动连接有铰座22,且铰座22与导向板19铰接,所述第一丝杆21远离铰座22的一端固定有手轮23,通过旋转手轮23带动第一丝杆21转动,进而可推动导向板19翻转,调节导向板19的导向尺寸,便于根据不同工件大小进行调整。
26.所述第一电机4、第二电机73和第三电机67均为一种减速电机。
27.参考图2所示,所述传送带3两端均设有限位齿24,所述输送辊2两端对称开设有与限位槽相配合的齿槽25,且限位齿24与齿槽25啮合连接,提高传送带3传送的精度。
28.参考图11所示,所述机架1底部对称固定有调节支脚26,所述调节支脚26包括第二螺纹套筒261、螺栓262和防滑垫263,所述机架1底部对称固定有第二螺纹套筒261,所述第二螺纹套筒261内壁螺纹连接有螺栓262,所述螺栓262底部转动安装有防滑垫263,通过旋转螺栓262,调节防滑垫263的高度,以便于对机架1的调平。
29.工作原理:在使用时,工件通过机械手放置到传送带3上,并被挡板93阻挡,然后通过气缸92带动挡板93升起,使得工件向前输送,与此同时,第二电机73转动带动带动同步带轮71转动,进而可带动同步皮带72传动,使得同步皮带72上的伸缩杆机构8运动,进而可带动摄像头14进行运动,使得摄像头14在工件上方跟随工件一起同步向前运动,使得工件相对于摄像头14为静止状态,从而使得摄像头14在对工件进行图像采集时,可以更加精准,摄像头14有两个,两个伸缩杆机构8对称固定在同步皮带72上,使得同步皮带72传动时,两个伸缩杆机构8会反向运动,使得其中一个摄像头14在跟随工件进行运动时,另一个摄像头14在向下一个工件的方向运动,在第一个摄像头14刚好对工件进行测量完成后,第二个摄像头14刚好移动至第二个工件的正上方,继续跟随第二个工件进行测量,从而使得两个摄像头14可无缝交替对工件进行测量,大大提高工作效率和测量精度;伸缩杆机构8与导向轨道13相配合,导向轨道13上的两个水平段131设有高低差,使得伸缩杆机构8上的驱动杆85与导向轨道13内壁滑动,且两个伸缩杆机构8上的驱动杆85分别在两个水平段131上,其中,跟随工件移动的伸缩杆机构8上的驱动杆85始终在较低的水平段131上,而对工件测量完成后,摄像头14往回移动复位,使得驱动杆85在倾斜段132内导向上升,进而可带动滑杆82进行升起,进而带动复位的摄像头14升起,避开正在跟随工件测量的摄像头14,使得两个摄像头14交替在对工件测量时,高度和位置始终保持一致,提高测量精度;
通过第三电机67转动带动螺纹杆64转动,进而可带动升降块65升起,从而可带动升降板62升降,调节摄像头14的高度,从而可适用不同高度的工件的测量;在对工件进行测量的过程中,传送带3不会骤然停止或启动,使得工件放置的稳定性提高,避免较高的工件因惯性而倾倒的现象。
30.本发明中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
31.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1