基于多任务学习的单快拍相干超分辨DOA估计技术
基于多任务学习的单快拍相干超分辨doa估计技术
技术领域
1.本发明属于天线阵列信号处理技术领域,具体地说,是一种基于多任务学习的单快拍相干超分辨波达方向估计方法、系统、存储介质和设备。
背景技术:
2.波达方向(direction of arrival,doa)估计问题是宇航、通信和雷达等领域的经典问题。对于相干源的doa估计,经典的超分辨算法包括多重信号分类算法(multiple signal classification,music)、最大似然算法(maximum likelihood,ml)。ml算法已知噪声的统计分布特征,算法性能较优。对于单源信号,通常可以直接采用ml算法进行角度估计,但如果涉及到多源估计问题,ml算法涉及到多个维度的投影矩阵计算问题,计算量较大,实时性较差,通常可以采用多维交替迭代的优化算法,降低计算复杂度,但交替迭代过程不能总是优化到全局最优解,性能会略有损失;若采用music算法,则必须先进行解相干处理,恢复协方差矩阵的秩,经典的秩恢复手段是采用子阵平滑的方法实现,即空间平滑music算法(spatial smoothing music,ssmusic)。显而易见,平滑处理造成了阵列孔径损失,测角性能下降,此外,music算法涉及到特征值分解运算,计算量较大。对于这几种超分辨算法,在理想远场平面波模型条件下,若快拍数和信噪比(signal-to-noise ratio,snr)较高时,能取得良好的估计性能;但是,当实际接收信号模型不满足远场平面波模型匹配度较高,快拍数较少时,则超分辨算法性能大大降低。
3.近些年,随着计算机算力的提升,深度学习技术在语音、图像领域得到广泛应用,算法性能较传统算法而言,具有更高的精度。受样本量的影响,深度学习技术与雷达的研究相对较少,也有少量科研工作者研究基于深度学习的超分辨doa估计算法。2019年1月,xiang等人在iet radar sonar&navigation期刊上发表了一种基于自编码器的doa估计方法,通过挖掘接收数据的空域数据特征,并对目标仰角进行表征,进而反演doa信息。该方法在复杂多径条件下性能比已有的ssmusic方法精度更高,且计算量比ssmusic方法更小。2019年4月,针对宽带雷达的多源doa估计问题,wang等人在ieee signal processing letters期刊提出了一种基于支持向量回归(support vector regression,svr)的doa估计方法,通过利用支持向量机学习接收数据的实部和虚部数据与doa信息的复杂映射关系,进而实现doa估计,方法性能与子空间类的music相比性能更高。此外,国防科技大学liu zhangmeng通过构建多个自编码器网络,分别滤出阵列接收信号中蕴含的多点源的角度信息,算法对阵列误差具有良好的泛化性。
4.已有的基于深度学习的超分辨算法性能虽高,但仅利用到目标的空域特征,即空域稀疏性,通过深度神经网络学习阵列接收数据与目标仰角的映射关系,对阵列接收数据要求要有较高的快拍数。
技术实现要素:
5.发明目的:本发明提供一种基于多任务学习(multi-task learning,mtl)的单快
拍相干超分辨doa估计方法和系统,该方法计算量小,实时性高,仅需要单快拍数据即可实现超分辨doa估计。
6.技术方案:本发明一方面提供了一种基于多任务学习的单快拍相干超分辨doa估计方法,包括:
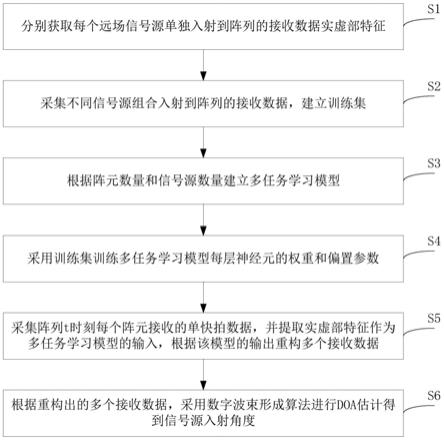
7.s1、分别获取每个远场信号源单独入射到阵列的接收数据实虚部特征,第k个信号源单独入射到阵列,第m个阵元的接收数据实虚部特征为源单独入射到阵列,第m个阵元的接收数据实虚部特征为其中m为均匀线阵中阵元的数量,k为远场信号源的数量,信号源之间相干;
8.s2、采集不同信号源组合入射到阵列的接收数据,建立训练集,其中第n个样本n为样本总数;yn=(y
1,n
,y
2,n
,
…
,y
m,n
,
…
,y
m,n
),为m个阵元接收数据实虚部特征构成的向量;为k个远场信号源的入射标识,当采集第n个样本时第k个信号源入射到阵列,则否则否则为第n个样本的标签,为第n个样本的标签,
9.s3、根据阵元数量m和信号源数量k建立多任务学习模型,所述模型的输入层神经元个数为2m,输出层神经元分为k组,每组包括2m个神经元;
10.s4、将训练集样本的阵元接收数据实虚部特征构成的向量yn作为多任务学习模型的输入,样本标签作为输出,训练所述多任务学习模型每层神经元的权重和偏置参数;
11.s5、在估计阶段,采集阵列t时刻每个阵元接收的单快拍数据,并提取实虚部特征,构成2m维待估计向量ye(t);将ye(t)作为训练好的多任务学习模型的输入,根据所述模型的k组输出重构k个接收数据,其中第k个接收数据为:
12.其中j为虚数符号,为多任务学习模型输出层中第k组中表示第m个阵元接收数据实部特征神经元的值,为多任务学习模型输出层中第k组中表示第m个阵元接收数据虚部特征神经元的值;
13.s6、根据重构出的k个接收数据,采用数字波束形成算法进行doa估计得到信号源入射角度;估计过程为:
14.其中为阵列导向矢量,λ为入射信号波长为,d为阵列中的阵元间距,h表示共轭转置,t表示转置;即第k个信号源的入射角度估计值为取最大值时的θ取值。
15.另一方面,本发明公开了实现上述doa估计方法的估计系统,包括:
16.信号源单独入射接收数据实虚部特征获取模块(1),用于分别获取每个远场信号源单独入射到阵列的接收数据实虚部特征,第k个信号源单独入射到阵列,第m个阵元的接收数据实虚部特征为其中m为均匀线阵中阵元的数量,k为远场信号源的数量,信号源之间相干;
17.训练集构建模块(2),用于根据采集的不同信号源组合入射到阵列的接收数据,建
立训练集,其中第n个样本n为样本总数;yn=(y
1,n
,y
2,n
,
…
,y
m,n
,
…
,y
m,n
),为m个阵元接收数据实虚部特征构成的向量;为k个远场信号源的入射标识,当采集第n个样本时第k个信号源入射到阵列,则否则否则为第n个样本的标签,
18.多任务学习模型建立与训练模块(3),用于根据阵元数量m和信号源数量k建立多任务学习模型,所述模型的输入层神经元个数为2m,输出层神经元分为k组,每组包括2m个神经元;将训练集样本的阵元接收数据实虚部特征构成的向量yn作为多任务学习模型的输入,样本标签作为输出,训练所述多任务学习模型每层神经元的权重和偏置参数;
19.接收数据重构模块(4),用于根据采集的阵列t时刻每个阵元接收的单快拍数据,提取实虚部特征,构成2m维待估计向量ye(t);将ye(t)作为训练好的多任务学习模型的输入,根据所述模型的k组输出重构k个接收数据,其中第k个接收数据为:
20.其中j为虚数符号,为多任务学习模型输出层中第k组中表示第m个阵元接收数据实部特征神经元的值,为多任务学习模型输出层中第k组中表示第m个阵元接收数据虚部特征神经元的值
21.doa估计结果获取模块(5),用于根据重构出的k个接收数据,采用数字波束形成算法进行doa估计得到信号源入射角度;估计过程为:θ属于远场信号源入射角度集合;
22.其中为阵列导向矢量,λ为入射信号波长为,d为阵列中的阵元间距,h表示共轭转置,t表示转置;即第k个信号源的入射角度估计值为取最大值时的θ取值。
23.另一方面,本发明公开了一种计算机可读取存储介质,其上存储有计算机指令,所述计算机指令运行时执行上述doa估计方法。
24.另一方面,本发明公开了一种跨模态行人识别设备,包括处理器及存储介质,所述存储介质为上述计算机可读取存储介质;所述处理器加载并执行所述存储介质中的指令及数据用于实现上述doa估计方法。
25.有益效果:与现有技术相比,本发明公开的doa估计方法具有如下有益效果:1、计算量较小,算法实时性较强;现有的超分辨算法如music和ml算法,通常涉及矩阵特征值分解、矩阵求逆运算等,计算复杂度较高,而本发明中的方法仅利用数字波束形成算法即可以得到更高的测角性能;2、不损失阵列孔径;对于相干源,若需要恢复矩阵的秩,则需要划分子阵平滑,再进行超分辨doa估计,而算法性能与阵列孔径有关,阵列孔径越大,算法性能越高,相反则越低;本发明公开的方法无需恢复矩阵的秩,保留了整个阵列的孔径;3、本发明公开的方法有效挖掘阵列接收信号本身的数据特征,物理模型与网络模型高效匹配;4、本发明公开的方法仅需要单快拍数据,即可实现超分辨doa估计的效果。
附图说明
26.图1为实施例1中基于mtl的单快拍相干超分辨doa估计方法流程图;
27.图2为实施例1中建立的多任务学习模型结构示意图;
28.图3为mtl模型输入层神经元与阵元实虚部特征对应示意图;
29.图4为实施例1中基于mtl的单快拍相干超分辨doa估计系统的组成图;
30.图5为仿真实验1中snr与rmse关系曲线图;
31.图6(a)为仿真实验1中信源1的实虚部特征与理想真实实虚部特征对比图;
32.图6(b)为仿真实验1中信源2的实虚部特征与理想真实实虚部特征对比图;
33.图6(c)为仿真实验1中信源1的相位特征与理想真实相位特征对比图;
34.图6(d)为仿真实验1中信源2的相位特征与理想真实相位特征对比图;
35.图6(e)为仿真实验1中相干源合成前后相位特征曲线图;
36.图7为仿真实验2中测角均方根误差与信噪比关系的曲线图;
37.图8为仿真实验3中均方根误差与相位误差的关系曲线图;
38.图9(a)为仿真实验3中信源1的实虚部特征与理想真实实虚部特征对比图;
39.图9(b)为仿真实验3中信源2的实虚部特征与理想真实实虚部特征对比图;
40.图9(c)为仿真实验3中信源1的相位特征与理想真实相位特征对比图;
41.图9(d)为仿真实验3中信源2的相位特征与理想真实相位特征对比图;
42.图9(e)为仿真实验3中相干源合成前后相位特征曲线图;
43.图10为仿真实验4中测角均方根误差与信噪比关系的曲线图;
44.图11为本发明公开的单快拍相干超分辨doa估计设备的示意图。
具体实施方式
45.下面结合附图和具体实施方式,进一步阐明本发明。
46.实施例1:
47.本发明公开了一种基于多任务学习的单快拍相干超分辨doa估计方法,如图1所示,具体步骤如下:
48.s1、接收天线阵列为有m个阵元的均匀线阵,阵元间距为d;k个远场信号源分别从角度θ1,θ2,
…
,θk处入射,入射信号波长为λ,信号源之间相干,即第i个信号源的发射信号si(t)与第j个信号源sj(t)满足si(t)=ρsj(t),其中ρ为si(t)与sj(t)的相关系数,且|ρ|=1。
49.分别获取每个远场信号源单独入射到阵列的接收数据实虚部特征,第k个信号源单独入射到阵列,第m个阵元的接收数据实虚部特征为单独入射到阵列,第m个阵元的接收数据实虚部特征为本发明中,实虚部特征是由实部特征和虚部特征组成,即如果第k个信号源sk(t)单独入射到阵列时,第m个阵元的接收数据为则其实虚部特征其中real(
·
)和imag(
·
)分别表示取实部和虚部运算。
50.s2、采集不同信号源组合入射到阵列的接收数据,建立训练集,其中第n个样本n为样本总数;yn=(y
1,n
,y
2,n
,
…
,y
m,n
,
…
,y
m,n
),为m个阵元接收数据实虚部特征构成的向量;为k个远场信号源的入射标识,当采集第n
个样本时第k个信号源入射到阵列,则否则否则为第n个样本的标签,为第n个样本的标签,
51.s3、根据阵元数量m和信号源数量k建立多任务学习模型,所述模型的输入层神经元个数为2m,输出层神经元分为k组,每组包括2m个神经元;
52.本实施例中,以包括15个阵元的均匀线阵、远场信号源数量为2的场景为例,所建立的多任务学习模型如图2所示,其输入层lay
in
神经元个数为30,输出层lay
out
神经元分为2组,每组有30个神经元;输入层与输出层之间包括4层隐含共享层h1~h4,每层中包括4096个神经元。
53.输入层的30个神经元对应阵列中15个阵元的实虚部特征,对应方式可以有多种。图3-(a)中,相邻的两个神经元分别表示同一个阵元的实虚部特征;图3-(b)中,第1-15个神经元表示阵列中15个阵元的实部特征,第16-30个神经元表示阵列中15个阵元的虚部特征。输出层的k组神经元对应不同的信号源,同一组中的30个神经元对应阵列中的15个阵元的实虚部特征,对应方式与输入层中的对应方式一致。本实施例中,采用图3-(b)中的对应方式。
54.将输入层设置为第0层,输出层设置为第5层。
55.s4、将训练集样本的阵元接收数据实虚部特征构成的向量yn作为多任务学习模型的输入,样本标签作为输出,训练所述多任务学习模型每层神经元的权重和偏置参数;
56.本实施例中,对多任务学习模型进行训练时,目标函数为最小化如下损失函数:
[0057][0058]
其中表示以第n个样本中的实虚部特征构成的向量yn作为多任务学习模型输入时,模型输出层中第k组分别表示阵元接收数据实部特征、虚部特征神经元的值和构成的向量,本实施例中,为mtl输出层第k组中前m个神经元,为后m个神经元;为yn对应的标签;r(w)表示对多任务学习模型的权重矩阵w正则化项;|| ||表示2范数。目标函数为使多任务学习模型的输出逼近样本标签。
[0059]
通过最小化上述损失函数,反向修正mtl参数,多任务学习模型的参数优化公式为:
[0060][0061]
其中α表示学习率,w
ij
表示第i层第j个神经元的权值,bi表示第i层神经网络的偏置;w
ij
′
和bi′
分别表示更新后的权值和偏置。采用训练集多次优化模型参数化,直至目标函数收敛,得到训练好的多任务学习模型。
[0062]
s5、在估计阶段,采集阵列t时刻每个阵元接收的单快拍数据,并提取实虚部特征,构成2m维待估计向量ye(t);将ye(t)作为训练好的多任务学习模型的输入,根据所述模型的
k组输出重构k个接收数据,其中第k个接收数据为:
[0063]
其中j为虚数符号,为多任务学习模型输出层中第k组中表示第m个阵元接收数据实部特征神经元的值,为多任务学习模型输出层中第k组中表示第m个阵元接收数据虚部特征神经元的值;
[0064]
s6、根据重构出的k个接收数据,采用数字波束形成算法进行doa估计,得到信号源入射角度;
[0065]
由于重构出的每个接收数据仅包含单个信号源,采用常规数字波束形成算法,如dbf、music、ml等,即可实现doa估计。估计过程为:
[0066]
其中为阵列导向矢量,λ为入射信号波长为,d为阵列中的阵元间距,h表示共轭转置,t表示转置;即第k个信号源的入射角度估计值为取最大值时的θ取值。
[0067]
实现本实施例doa估计方法的系统如图4所示,包括:
[0068]
信号源单独入射接收数据实虚部特征获取模块1,用于分别获取每个远场信号源单独入射到阵列的接收数据实虚部特征,第k个信号源单独入射到阵列,第m个阵元的接收数据实虚部特征为其中m为均匀线阵中阵元的数量,k为远场信号源的数量,信号源之间相干;
[0069]
训练集构建模块2,用于根据采集的不同信号源组合入射到阵列的接收数据,建立训练集,其中第n个样本n为样本总数;yn=(y
1,n
,y
2,n
,
…
,y
m,n
,
…
,y
m,n
),为m个阵元接收数据实虚部特征构成的向量;为k个远场信号源的入射标识,当采集第n个样本时第k个信号源入射到阵列,则否则否则为第n个样本的标签,
[0070]
多任务学习模型建立与训练模块3,用于根据阵元数量m和信号源数量k建立多任务学习模型,所述模型的输入层神经元个数为2m,输出层神经元分为k组,每组包括2m个神经元;将训练集样本的阵元接收数据实虚部特征构成的向量yn作为多任务学习模型的输入,样本标签作为输出,训练所述多任务学习模型每层神经元的权重和偏置参数;
[0071]
接收数据重构模块4,用于根据采集的阵列t时刻每个阵元接收的单快拍数据,提取实虚部特征,构成2m维待估计向量ye(t);将ye(t)作为训练好的多任务学习模型的输入,根据所述模型的k组输出重构k个接收数据,其中第k个接收数据为:
[0072]
其中j为虚数符号,为多任务学习模型输出层中第k组中表示第m个阵元接收数据实部特征神经元的值,为多任务学习模型输出层中第k组中表示第m个阵元接收数据虚部特征神经元的值
[0073]
doa估计结果获取模块5,用于根据重构出的k个接收数据,采用数字波束形成算法
进行doa估计,得到信号源入射角度;估计过程为:
[0074]
其中为阵列导向矢量,λ为入射信号波长为,d为阵列中的阵元间距,h表示共轭转置,t表示转置;即第k个信号源的入射角度估计值为取最大值时的θ取值。
[0075]
实施例2:
[0076]
本实施例与实施例1的区别在于:所述步骤s2中还包括对训练集中的样本进行高斯归一化,以保证阵元接收数据的实虚部特征处于神经元的激活区。
[0077]
归一化后的阵元接收数据实虚部特征组成的向量为:
[0078]
为归一化前的向量,μ和σ分别表示训练集中接收数据实虚部特征构成的向量的统计均值和标准差;
[0079]
同样地,步骤s5先对待估计向量ye(t)以上述方式进行归一化,再将归一化后的待估计向量输入多任务学习模型中。
[0080]
增加归一化后,本实施例步骤s4中,对多任务学习模型进行训练时,目标函数为最小化如下损失函数:
[0081][0082]
即:使多任务学习模型的输出逼近样本标签同时使k组输出之和逼近输入。
[0083]
本实施例通过如下仿真实验验证了本发明公开的doa估计方法的效果。
[0084]
仿真实验1:
[0085]
本实验对比了相干源条件下不同doa估计方法在不同信噪比下的测角性能。
[0086]
阵列为15阵元的均匀线阵,阵元间距为半波长,波长λ=1m,快拍数为1,训练集与测试集样本的信噪比均是0db~10db,步长2db,2个相干信号源入射角度的范围分别为θ1∈[-3
°
,0
°
],θ2∈[5
°
,8
°
]。图5为mtl模型处理前后,不同算法的测角均方根误差(root-mean square error,rmse)与信噪比的关系曲线。其中,用“·-·-·
+”表示的曲线为采用文献1:“《direction-of-arrival estimation based on deep neural networks with robustness to array imperfections》,ieee transactions on antennas and propagation,2018”中的方法;用
“……
+”表示的曲线为采用文献2:“《coherent svr learning for wideband direction-of-arrival estimation》,ieee signal processing letters,2019”中的方法;和分别表示采用dbf、music和ml算法的结果,music和ml算法的结果,和分别表示采用步骤s1-s5的mtl学习后,步骤s6再采用dbf、music和ml算法的结果。
[0087]
从图5中可以看出,经过训练好的mtl模型处理后,dbf、music和ml等算法性能都有大幅度提升,测角性能提高了50%。此外,经过mtl模型处理后,三种算法的估计性能几乎一致,这意味着可以采用计算复杂度较低、实时性较强的dbf算法代替music、ml等算法,实现超分辨doa估计。
[0088]
为了进一步分析mtl模型学习性能,任取一信噪比为10db的样本,分析mtl学习后的实虚特征、相位特征,如图6(a)-6(e)所示。其中,表示期望的理想特征,表示mtl学习得到的特征。对比图6(a)和图6(b),可以看出mtl模型输出的实虚部特征与理想真实实虚部特征非常接近,这表明mtl模型能有效挖掘原始阵列接收数据中蕴含的相干源的实虚部特征,并多路输出,所提mtl模型是有效的。图6(c)和图6(d)分别给出了mtl模型输出数据的相位特征,可以看出,mtl模型输出数据相位分布与理想相位特征具有良好的一致性,这是测角性能有效提高的关键。图6(e)对比了两相干源合成后的相位分布,可以看出,mtl模型输出数据的相位更接近于理想相位,且相位的线性性更高。
[0089]
仿真实验2:
[0090]
本实验验证了本发明公开方法对信噪比的泛化性。仿真条件及参数与仿真实验1相同,但训练集的信噪比是0db~10db,步长2db,测试集的信噪比是-1db~13db,步长2db,训练样本集和测试样本集不匹配,且始终存在1db的信噪比差异。图7为mtl模型处理前后,各算法的测角均方根误差与信噪比的关系曲线。其中,用“·-·-·
+”表示的曲线为采用文献1中的方法;用
“……
+”表示的曲线为采用文献2中的方法;和分别表示采用dbf、music和ml算法的结果,和分别表示采用步骤s1-s5的mtl学习后,步骤s6再采用dbf、music和ml算法的结果。
[0091]
从图7中可以看出,本发明所公开的方法对信噪比参数具有良好的泛化性,即使存在1db的信噪比差异,该方法仍然能取得良好的估计性能,精度优于已有的dbf、music和ml等超分辨算法。因此,本发明公开的方法对信噪比具有良好的泛化性,可靠性较高。
[0092]
仿真实验3:
[0093]
本实验验证了本发明公开方法在相干源条件下,匹配阵列误差时的测角性能。假设阵列为15阵元的均匀线阵,阵元间距为半波长,波长λ=1m,快拍数为1,信噪比10db,训练集与测试集样本的幅相误差为0%~50%,误差间隔10%,相干源角度θ1∈[-3
°
,0
°
],θ2∈[5
°
,8
°
]。图8给出了mtl模型处理前后,各算法的测角均方根误差与相位误差的关系曲线。其中,用“·-·-·
+”表示的曲线为采用文献1中的方法;用
“……
+”表示的曲线为采用文献2中的方法;2中的方法;和分别表示采用dbf、music和ml算法的结果,和分别表示采用步骤s1-s5的mtl学习后,步骤s6再采用dbf、music和ml算法的结果。
[0094]
从图8可以看出,经过mtl模型挖掘实虚部特征后,即使存在一定的幅相误差,dbf、music和ml算法均能有效进行doa估计,算法性能有所改善。此外,三种算法估计性能几乎一致,因此可以采用计算复杂度较低的dbf算法来实现超分辨doa估计的效果。
[0095]
为了进一步分析mtl挖掘前后的特征,图9(a)-图9(e)给出了mtl模型输出的实虚部特征、相位分布及两个信号源合成后的相位特征。可以看出,mtl模型挖掘到的特征与理
想特征非常接近,相位畸变更小,所提mtl模型能实现相干源特征分离的效果。其中,表示期望的理想特征,表示mtl学习得到的特征。
[0096]
仿真实验4:
[0097]
本实验验证了本发明公开方法在相干源条件下,失配阵列误差时的测角性能。仿真参数与仿真3一致,但训练集样本的幅相误差为0%~50%,测试集样本的幅相误差为5%~55%,误差间隔10%,训练样本集和测试样本集不匹配,且始终存在5%的幅相误差差异,相干源角度θ1∈[-3
°
,0
°
],θ2∈[5
°
,8
°
]。图10给出了mtl模型处理前后,各算法的测角均方根误差与相位误差的关系曲线。其中,用“·-·-·
+”表示的曲线为采用文献1中的方法;用
“……
+”表示的曲线为采用文献2中的方法;和分别表示采用dbf、music和ml算法的结果,和分别表示采用步骤s1-s5的mtl学习后,步骤s6再采用dbf、music和ml算法的结果。
[0098]
从图10中可以看出,即使训练集和测试集的阵列误差存在失配现象,采用本发明方法中的mtl模型仍然能对相干源的特征进行有效挖掘,且mtl模型处理后,各算法性能均有所提高。故所提算法对阵列误差同样具有良好的泛化性,可靠性较高。
[0099]
本发明公开的单快拍相干超分辨doa估计设备如图11所示,包括处理器111及存储介质112,其中存储介质112为计算机可读取存储介质,其上存储有计算机指令,该计算机指令运行时执行本发明所公开的doa估计方法的步骤;处理器111加载并执行所述存储介质112中的指令及数据用于实现上述doa估计方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1