一种针对地下非开挖牵引管的精确三维坐标数据采集的方法与流程
1.本发明涉及地下管线测绘技术领域,尤其涉及针对地下非开挖牵引管的精确三维坐标数据采集的方法。
背景技术:
2.针对隐蔽地下管线,现有探测方法主要分为直接测量法、电磁感应法、地震仪法等。
3.由于地下管线环境复杂,以上几种方法抗干扰能力差,探测有效深度低,针对非开挖牵引管等埋深较深且路径、深度不断变化的非金属管线探测效果不佳,无法为交叉施工等提供数据支撑。
技术实现要素:
4.基于背景技术存在的技术问题,本发明提出了针对地下非开挖牵引管的精确三维坐标数据采集的方法。
5.本发明提出的针对地下非开挖牵引管的精确三维坐标数据采集的方法,包括如下步骤:
6.步骤1、利用惯性陀螺仪进行管线定位:把载有航向和姿态传感器的管内测量单元放入通道并使之沿通道运动,测出通道内各个位置的航向与俯仰角,将航向、姿态信息与里程信息结合从而推算出通道的三维坐标。
7.步骤2、测量单元内的陀螺仪和加速度计分别测量定位仪内相:对惯性空间的3个旋转角速度和3个线加速度沿定位仪坐标系的分量,经过坐标转换,把加速度信息转化为沿导航坐标系的加速度,并计算出定位仪的位置、速度、航向、和水平姿态;
8.其中,常用的几种坐标系主要为:惯性坐标系、地球坐标系、地理坐标系、载体坐标系、陀螺坐标系和运动参考坐标系。
9.步骤3、控制测量;具体包括如下步骤:
10.s1:地下管线测量要充分利用已有的等级控制点,如控制点不能满足地下管线测量要求时,应加密等级控制点或布设图根控制点;
11.s2:已有的控制点在使用前必须进行检核,有两个以上通视方向的控制点应进行固定角检核和边长检核,其它控制点应进行边长检核;
12.s3:光电测距图根导线测量;
13.s4:采用gps技术布设控制点,其平面坐标可采用静态和动态等方法进行测量。
14.步骤4、采用惯性陀螺仪精准探测;
15.步骤5、进行数据采集;具体包括如下步骤:
16.k1、对待测管孔起点、终点位置三维坐标数据采集:采用全站仪或gps-rtk精确测量待测管线的起终端点的三维坐标,作为惯性陀螺仪定位测量的起算校核资料,计算校核管线的三维坐标。
17.k2、清理待测管孔通道:惯性陀螺仪对探测管道内部环境要求高,不能有杂物等,以免数据失真以及损坏仪器,使用管道疏通设备对待测管孔进行管道数据,保证待测管孔内部清洁。
18.k3、使用惯性陀螺仪进行定位测量:将测量单元直接置于管线内,采用置中技术使测量位置为管线中心轴线,设定参数,拖拽惯性定位陀螺仪测量主机由管线进口行至出口,由计算主机自动记录计算其运动轨迹,每一个实测管孔最少测量3个来回共6次,以保证数据准确性。
19.k4、数据初步处理以及质量判断:现场数据处理,评估数据质量以及精度,确定是否需要重测,初步确认数据无误后保存数据准备下一段通道的探测。
20.优选地,所述步骤3中光电测距图根导线测量,包括如下步骤:
21.a:光电测距图根导线宜布设成附合导线和导线网;
22.b:如因地形条件限制图根导线无法附合时,可布设图根支导线,但支导线连续支点不得超过4个,总长度不大于450m,支导线测距可单程观测五分钟;水平角观测首站应联测两个已知方向,其它站水平角可观测五分钟。
23.1、针对非开挖牵引管等埋深较深且路径、深度不断变化的非金属管线探测效果佳,可以为交叉施工等提供数据支撑,只要有空管,对金属管线以及非金属管线都能测绘,不受管线长度、深度以及地下其他管线影响;
24.2、针对非开挖牵引管等埋深较大的地下管线,经济的、快速的精确采集管线三维坐标,精度满足交叉施工要求。
附图说明
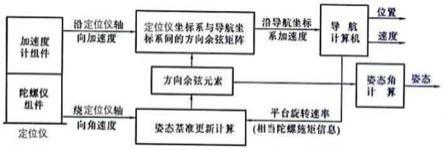
25.图1为本发明提出的针对地下非开挖牵引管的精确三维坐标数据采集的方法中利用惯性陀螺仪进行管线定位的工作原理图;
26.图2为本发明提出的针对地下非开挖牵引管的精确三维坐标数据采集的方法中采用惯性陀螺仪精准探测的实施流程图。
具体实施方式
27.下面结合具体实施例对本发明作进一步解说。
28.实施例
29.针对地下非开挖牵引管的精确三维坐标数据采集的方法,包括如下步骤:
30.步骤1:利用惯性陀螺仪进行管线定位:把载有航向和姿态传感器的管内测量单元放入通道并使之沿通道运动,测出通道内各个位置的航向与俯仰角,将航向、姿态信息与里程信息结合从而推算出通道的三维坐标,具体工作原理如图1所示。
31.步骤2:测量单元内的陀螺仪和加速度计分别测量定位仪内相:对惯性空间的3个旋转角速度和3个线加速度沿定位仪坐标系的分量,经过坐标转换,把加速度信息转化为沿导航坐标系的加速度。并计算出定位仪的位置、速度、航向、和水平姿态;其中,常用的几种坐标系主要为:惯性坐标系、地球坐标系、地理坐标系、载体坐标系、陀螺坐标系和运动参考坐标系。
32.步骤3:控制测量:包括如下步骤:
33.s1:地下管线测量要充分利用已有的等级控制点,如控制点不能满足地下管线测量要求时,应加密等级控制点或布设图根控制点,等级控制点按《控制测量规范》执行。
34.s2:已有的控制点在使用前必须进行检核,有两个以上通视方向的控制点应进行固定角检核和边长检核,其它控制点应进行边长检核。
35.s3:光电测距图根导线测量:包括如下步骤:
36.a:光电测距图根导线宜布设成附合导线和导线网,其技术要求按表“图根光电测距导线测量的技术要求”规定执行。
37.b:如因地形条件限制图根导线无法附合时,可布设图根支导线,但支导线连续支点不得超过4个,总长度不大于450m。支导线测距可单程观测五分钟;水平角观测首站应联测两个已知方向,其它站水平角可观测五分钟。
38.s4:采用gps技术布设控制点,其平面坐标可采用静态和动态等方法进行测量。静态测量的作业方法和数据处理按《卫星定位城市测量技术规范》的要求执行,动态rtk测量应符合以下规定:
39.a.基准站的位置宜选在高处;
40.b.施测前应量取天线高,读数至mm位,并做好记录;
41.c.准确求取基准站的wgs-84坐标;
42.d.根据测区大小应连测3个以上且分布均匀的等级控制点,求解测区坐标的转换参数;
43.e.流动站采用三角架模式测量,设站时应对中置平;
44.f.流动站半径应小于5km;
45.g.应选择卫星较好时段和卫星数不少于4颗时进行作业;
46.h.流动站观测时,其观测精度应控制在
±
2cm以内,且每点应独立观测两次,其较差小于5cm时,取均值作为观测成果,否则应重测;
47.i.施测前应检测一个已知控制点,并比较其平面坐标,以确定观测成果的可靠性。
48.步骤4:采用惯性陀螺仪精准探测,实施流程如图2所示:
49.步骤5:数据采集:
50.k1:对待测管孔起点、终点位置三维坐标数据采集:采用全站仪或 gps-rtk精确测量待测管线的起终端点的三维坐标,作为惯性陀螺仪定位测量的起算校核资料,计算校核管线的三维坐标。
51.k2:清理待测管孔通道:惯性陀螺仪对探测管道内部环境要求高,不能有杂物等,以免数据失真以及损坏仪器,使用管道疏通设备对待测管孔进行管道数据,保证待测管孔内部清洁。
52.k3:使用惯性陀螺仪进行定位测量:将测量单元直接置于管线内,采用置中技术使测量位置为管线中心轴线,设定参数,拖拽惯性定位陀螺仪测量主机由管线进口行至出口,由计算主机自动记录计算其运动轨迹。每一个实测管孔最少测量3个来回共6次,以保证数据准确性。
53.k4:数据初步处理以及质量判断:现场数据处理,评估数据质量以及精度,确定是否需要重测,初步确认数据无误后保存数据准备下一段通道的探测。
54.发明,针对非开挖牵引管等埋深较深且路径、深度不断变化的非金属管线探测效
果佳,可以为交叉施工等提供数据支撑,针对非开挖牵引管等埋深较大的地下管线,经济的、快速的精确采集管线三维坐标,精度满足交叉施工要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1