微机电多轴角速度感测器的制作方法
本发明涉及一种侦测角速的微机电领域,特别是一种微机电多轴角速度感测器领域。
背景技术:
1、微机电系统(mems)是指有些元件具备机械功能性的机械和机电系统,可应用于快速且准确侦测物理性质的微小改变。例如,微机电角速度感测器可应用于侦测微小的角位移。运动的六个自由度中,围绕三正交轴线的旋转可被称为角速度感测器的角速率感测器量测。mems角速度感测器系使用科氏效应来量测角速率。若一质量块在一方向上移动且被施加旋转角度时,质量块因科氏力的作用而在正交方向上承受一力,藉由科氏力所引起的位移可由电容式、压电式或压阻式感测结构读取。在mems角速度感测器中,机械振荡被用作主要运动,当一振荡角速度感测器承受一角运动,且此角运动垂直于主要运动的方向时,在垂直主要运动和角运动的第三垂直方向上产生次级振荡(或被称为侦测运动),侦测运动的振幅可被用作角速率的量测值。
2、习知的mems三轴角速度感测器结构由三个独立的x,y,z单轴角速度感测器构成,使得相应的asic电路需具备三套独立的驱动电路设计,导致mems三轴角速度感测器的体积较大。为了解决体积过大的问题,共用质量块的设计因运而生,然共用质量块存在运动干扰,从而造成mems三轴角速度感测器的轴间信号串扰。因此,解决mems三轴角速度感测器结构体积过大但兼顾感测品质的方案仍在为业界追求中。
技术实现思路
1、本发明于此提供一种mems多轴角速度感测器,至少有二轴具有各自独立的驱动结构和质量块,并透过一第三驱动结构连动二个驱动结构使之同步运动(synchronize),减少二轴振荡时序不同步和振幅差异的产生。
2、本发明于此提供一种mems多轴角速度感测器,至少有二轴具有各自独立的驱动结构和质量块,透过一第三驱动结构连动结构上的摆动质量块使之同步运动的设计,储存侦测质量块的机械振荡能,并透过一耦合结构的连接稳定结构以减少不必要的方向上的振动,以及使摆动质量块受科氏力产生的运动倾向同步反相运动。
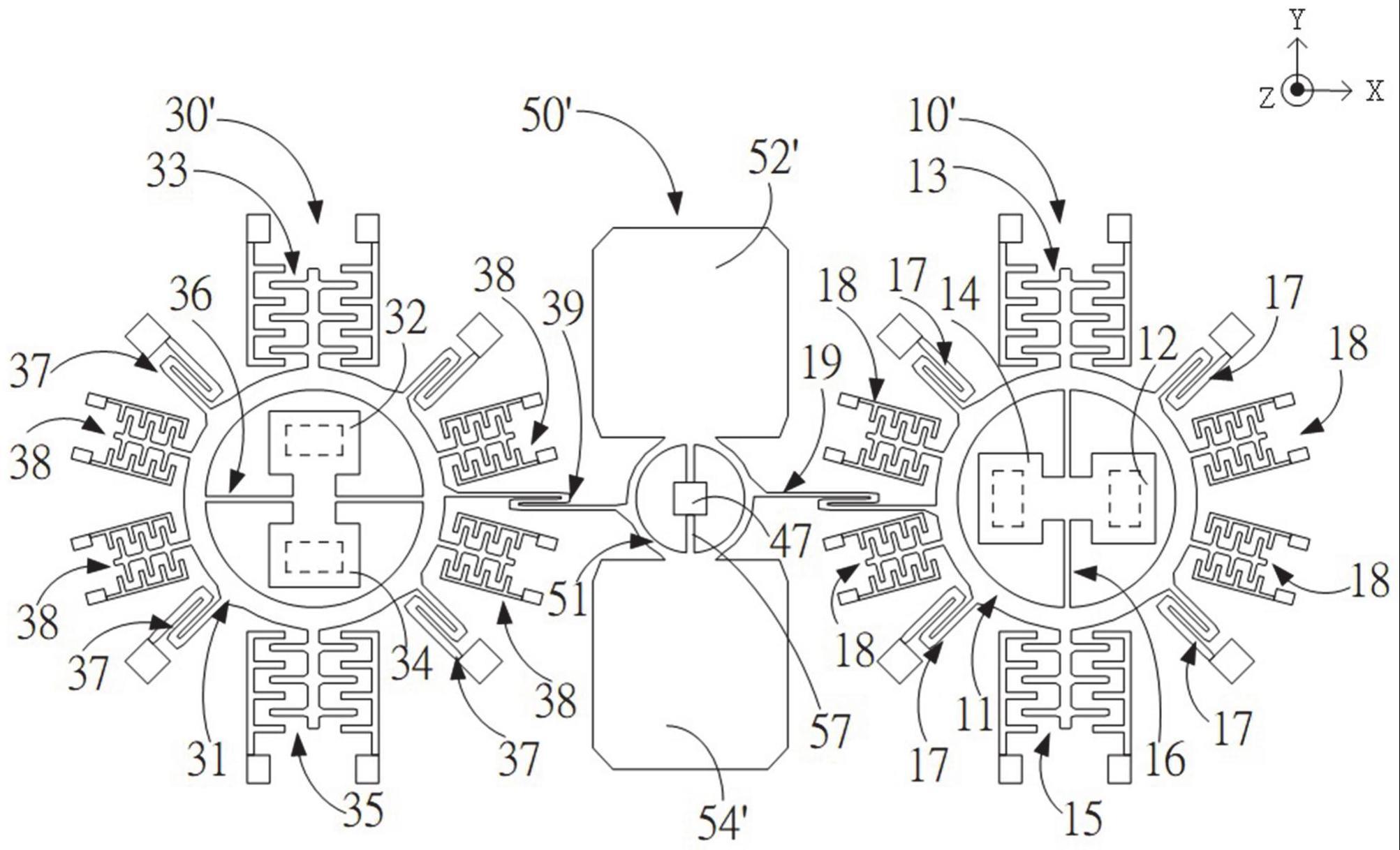
3、一种微机电多轴角速度感测器,包括一基板和一微机电晶圆层平行相对设置,以及多个固定锚将该微机电晶圆层连接以固定至该基板上,其特征在于该微机电晶圆层包括:一第一驱动及感测结构,其包括一第一驱动环、多个第一驱动电梳对结构及多个第一感测验证质量块,该多个第一驱动电梳对结构和该多个第一感测验证质量块分别连接该第一驱动环;一第二驱动及感测结构,其包括一第二驱动环、多个第二驱动电梳对结构及多个第二感测验证质量块,该多个第二驱动电梳对结构和该多个第二感测验证质量块分别连接该第二驱动环;一第三驱动环设置于该第一驱动环和该第二驱动环之间并连接该第一驱动环和该第二驱动环,其中,在一驱动模态时,该多个第一驱动电梳对结构驱动该第一驱动环进行周期性旋转运动,该多个第二驱动电梳对结构驱动该第二驱动环进行周期性旋转运动,并且该第一驱动环和该第二驱动环带动该第三驱动环进行周期性旋转运动;以及二个摆动质量块分别连接该第三驱动环并位于该第三驱动环外相对二侧。
4、一种微机电多轴角速度感测器,包括:一基板包括多个第一感测垫和多个第二感测垫,该基板平行一第一轴和一第二轴所定义的一平面;一第一驱动及感测结构设置于该基板上,该第一驱动及感测结构包括一第一驱动环连接多个第一驱动电梳对结构和二个第一感测验证质量块,其中,该多个第一感测验证质量块分别对应该多个第一感测垫以构成侦测一第三轴方向科氏力的一第一差分电容对,该多个第一感测验证质量块对称于该第二轴地设置,该第三轴方向垂直该第一轴和该第二轴;一第二驱动及感测结构设置于该基板上,该第二驱动及感测结构包括一第二驱动环连接多个第二驱动电梳对结构和二个第二感测验证质量块,其中,该多个第二感测验证质量块分别对应该多个第二感测垫以构成侦测一第三轴方向科氏力的一第二差分电容对,该多个第二感测验证质量块对称于该第一轴地设置;一第三驱动环设置于该第一驱动环和该第二驱动环之间并连接该第一驱动环和该第二驱动环,其中,在一驱动模态时,该多个第一驱动电梳对结构驱动该第一驱动环进行周期性旋转运动,该多个第二驱动电梳对结构驱动该第二驱动环进行周期性旋转运动,并且该第一驱动环和该第二驱动环带动该第三驱动环进行周期性旋转运动,在一感测模态时,该第一驱动及感测结构作为该第一轴的感测结构,该第二驱动及感测结构作为该第二轴的感测结构;二个摆动质量块分别连接该第三驱动环并位于该第三驱动环外相对二侧;以及一第一耦合结构设置于该第一驱动及感测结构、该第二驱动及感测结构和该二摆动质量块的周边,其中,每一该摆动质量块连接该第三驱动环和该第一耦合结构。
5、因此,一种微机电多轴角速度感测器,包括一基板和一微机电晶圆层平行相对设置,以及多个固定锚将该微机电晶圆层连接以固定至该基板上。该微机电晶圆层包括至少二驱动及感测结构、一第三驱动环以及二个摆动质量块。每一驱动及感测结构包括一驱动环、多个驱动电梳对结构及多个感测验证质量块,该多个驱动电梳对结构和该多个感测验证质量块分别连接该对应的驱动环。第三驱动环设置于该二驱动环之间并连接该二驱动环,其中,在一驱动模态时,该多个驱动电梳对结构驱动对应的该驱动环进行周期性旋转运动,并且该二驱动环带动该第三驱动环进行周期性旋转运动。二个摆动质量块分别连接该第三驱动环并位于该第三驱动环外相对二侧。
技术特征:
1.一种微机电多轴角速度感测器,包括一基板和一微机电晶圆层平行相对设置,以及多个固定锚将该微机电晶圆层连接以固定至该基板上,其特征在于,该微机电晶圆层包括:
2.如权利要求1所述的微机电多轴角速度感测器,其特征在于,更包括一第一耦合结构设置于该第一驱动及感测结构、该第二驱动及感测结构和该二摆动质量块的周边,其中,每一该摆动质量块连接该第三驱动环和该第一耦合结构,该第一耦合结构藉由该多个固定锚连接以固定至该基板上。
3.如权利要求2所述的微机电多轴角速度感测器,其特征在于,该第一耦合结构包括多个连接弹簧和至少二轭型结构,该多个连接弹簧连接每一该摆动质量块和该二轭型结构,并且该二轭型结构藉由该多个固定锚连接以固定至该基板上。
4.如权利要求1或2所述的微机电多轴角速度感测器,其特征在于,更包括一第一感测弹簧结构和一第二感测弹簧结构,其中,该多个第一感测验证质量块设置于该第一驱动环内并藉由该第一感测弹簧结构连接该第一驱动环,以及该多个第二感测验证质量块设置于该第二驱动环内并藉由该第二感测弹簧结构连接该第二驱动环。
5.如权利要求4所述的微机电多轴角速度感测器,其特征在于,该第二感测弹簧结构平行一第一轴且该多个第二感测验证质量块对称于该第一轴,以及该第一感测弹簧结构平行一第二轴且该多个第一感测验证质量块对称于该第二轴,该第一轴垂直于该第二轴。
6.如权利要求5所述的微机电多轴角速度感测器,其特征在于,该多个第一驱动电梳对结构两两对称于该第一轴和该第二轴,并且该多个第二驱动电梳对结构两两对称于该第一轴、该第二轴、或该第一轴和该第二轴。
7.如权利要求1或2所述的微机电多轴角速度感测器,其特征在于,每一该摆动质量块包括一第三驱动框连接该第三驱动环、一第三感测验证质量块设置在该第三驱动框内、以及一第三感测弹簧结构连接该第三感测验证质量块至该第三驱动框。
8.如权利要求7所述的微机电多轴角速度感测器,其特征在于,更包括一第三驱动弹簧设置于该第三驱动环内,其中,该第三驱动弹簧连接该第三驱动环并藉由该多个固定锚之一固定至该基板上。
9.如权利要求1或2所述的微机电多轴角速度感测器,其特征在于,更包括一第一驱动感测电梳对结构以及一第二驱动感测电梳对结构,其中,该第一驱动感测电梳对结构连接至该第一驱动环,并且该第二驱动感测电梳对结构连接至该第二驱动环。
10.如权利要求1、2或3所述的微机电多轴角速度感测器,其特征在于,该第一驱动环、该第二驱动环和该第三驱动环的几何中心成一直线关系,以及在该驱动模态时,该第一驱动环和该第二驱动环的周期性旋转运动的方向异于该第三驱动环周期性旋转运动的方向。
11.如权利要求1、2或3所述的微机电多轴角速度感测器,其特征在于,基板包括多个第一感测垫和多个第二感测垫,该多个第一感测垫分别对应该多个第一感测验证质量块,该多个第二感测垫分别对应该多个第二感测验证质量块。
12.一种微机电多轴角速度感测器,其特征在于,包括:
13.如权利要求12所述的微机电多轴角速度感测器,其特征在于,在该驱动模态时,该第一驱动环和该第二驱动环的周期性旋转运动的方向异于该第三驱动环周期性旋转运动的方向。
14.如权利要求12或13所述的微机电多轴角速度感测器,其特征在于,更包括多个第一驱动弹簧、多个第二驱动弹簧、一第三驱动弹簧和多个固定锚,其中,该第一驱动环藉由该多个第一驱动弹簧连接该多个固定锚之一些至该基板上,该第二驱动环藉由该多个第二驱动弹簧连接该多个固定锚之一些至该基板上,以及该第三驱动弹簧设置于该第三驱动环内,该第三驱动环藉由该第三驱动弹簧连接该多个固定锚之一至该基板上。
15.如权利要求12或13所述的微机电多轴角速度感测器,其特征在于,每一该摆动质量块包括一第三驱动框连接该第三驱动环、一第三感测验证质量块设置在该第三驱动框内、以及一第三感测弹簧结构连接该第三感测验证质量块至该第三驱动框,在一感测模态时,该多个第三感测验证质量块作为一第三轴的感测结构,该第三轴分别垂直该第一轴和该第二轴。
16.如权利要求15所述的微机电多轴角速度感测器,其特征在于,该第一驱动及感测结构更包括一第一感测弹簧结构连接该第一驱动环和该多个第一感测验证质量块,其中,该第一感测弹簧结构和该多个第一感测验证质量块设置于该第一驱动环内,且该多个第一感测验证质量块对称于该第二轴。
17.如权利要求15所述的微机电多轴角速度感测器,其特征在于,该第二驱动及感测结构更包括一第二感测弹簧结构连接该第二驱动环和该多个第二感测验证质量块,其中,该第二感测弹簧结构和该多个第二感测验证质量块设置于该第二驱动环内,且该多个第二感测验证质量块对称于该第一轴。
18.如权利要求12所述的微机电多轴角速度感测器,其特征在于,该多个第一驱动电梳对结构两两对称于该第一轴和该第二轴,并且该多个第二驱动电梳对结构两两对称于该第一轴、该第二轴、或该第一轴和该第二轴。
19.如权利要求15所述的微机电多轴角速度感测器,其特征在于,更包括多个第一驱动感测电梳对结构以及多个第二驱动感测电梳对结构,其中,该多个第一驱动感测电梳对结构连接至该第一驱动环,并且该多个第二驱动感测电梳对结构连接至该第二驱动环。
20.如权利要求19所述的微机电多轴角速度感测器,其特征在于,更包括多个框结构,其中每一该框结构内设置至少一该多个第一驱动感测电梳对结构或一该多个第二驱动感测电梳对结构,并且该多个框结构连接该第一驱动环与该多个第一驱动电梳对结构、以及该第二驱动环与该多个第二驱动电梳对结构。
21.如权利要求20所述的微机电多轴角速度感测器,其特征在于,该多个框结构两两对称于该第一轴或该第二轴。
技术总结
一种微机电多轴角速度感测器,包括一基板和一微机电晶圆层平行相对设置,以及多个固定锚将该微机电晶圆层连接以固定至该基板上。该微机电晶圆层包括至少二驱动及感测结构、一第三驱动环以及二个摆动质量块。每一驱动及感测结构包括一驱动环、多个驱动电梳对结构及多个感测验证质量块,该多个驱动电梳对结构和该多个感测验证质量块分别连接该对应的驱动环。第三驱动环设置于该二驱动环之间并连接该二驱动环,其中,在一驱动模态时,该多个驱动电梳对结构驱动对应的该驱动环进行周期性旋转运动,并且该二驱动环带动该第三驱动环进行周期性旋转运动。二个摆动质量块分别连接该第三驱动环并位于该第三驱动环外相对二侧。
技术研发人员:曾立天
受保护的技术使用者:苏州明皜传感科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!