一种波浪的激光测量装置与三维波浪场时空反演重构方法
1.本发明涉及一种波浪(波面升高)的激光测量装置与三维波浪场时空反演重构方法,具体涉及一种波浪的激光测量装置与三维波浪场时空反演重构方法。
背景技术:
2.现有的海洋波浪测量装置主要有波浪浮标和测波雷达两种,第一种波浪浮标,通过浮标随波运动的特性来测量海上一点在数小时内的波浪统计参数(有义波高、波周期和浪向),日本zenilite浮标公司专利:jph08278130a,名称:wave height measuring buoy,为目前波浪测量的典型浮标技术,然而浮标得到的波浪统计参数难以实现以分钟计的三维时空波浪场的重构;第二种测波雷达,通过雷达回波获得一定范围内的波高,并由此得到波浪统计参数,美国海军专利:us7808426b1,名称:remote sensing of wave heights using a broadband radar arrangement,为典型的x波段雷达测波技术,尽管其可以测量大面积海域的波浪但其时空分辨率较低(空间分辨率超过1m,时间分辨率超过3s)且成本高昂,同样难以应用于以分钟计的三维时空波浪场的重构与预报。
3.海洋浮式结构物(船舶和海洋平台等)往往需要在中高恶劣海况下作业,如船载直升机起降、海上施工吊装作业和海上火箭发射回收等,为保障这些作业的安全亟需进行以分钟计的结构物近场三维波浪的时空重构和准确预报,由此实现以分钟计的作业窗口超短期预报,保障恶劣海况下的施工作业安全。然而,现有的两种主要的波浪测量装置波浪浮标和测波雷达都仅能测量波浪统计参数难以达到以分钟计的三维波浪场重构和预报。其中波浪浮标仅能测量海上一点在数小时内的波浪统计参数,即使大量布置浮标也难以实现以分钟计的三维波浪场准确预报;测波雷达(x波段、毫米波等)通过雷达回波实现大范围波浪统计参数的测量,但其时空分辨率较低(空间分辨率超过1m,时间分辨率超过3s)且成本高昂难以应用于以分钟计的三维时空波浪场的重构与预报。
4.在基于激光雷达的海洋波浪测量方面,专利:cn113219481a,名称:一种基于三维激光雷达的破波带波浪水动力监测方法及其系统,采用激光雷达对破波区域的波高进行了实时测量,但主要聚焦于近岸破波区波浪的测量,且雷达处于近岸固定状态,无法应用于深远海浮式结构物的近场波浪测量和重构;专利:cn109490906a,名称:一种基于激光雷达的船载波浪动态测量装置,提出了激光雷达的船载测波装置,但是其测量过程中实际上是用激光雷达观测水面上的漂浮块来间接得到波高,这与浮标原理类似,也难以得到三维时空波浪场。因此,目前的激光雷达测波装置都无法满足以分钟计的三维时空波浪预报需求。
技术实现要素:
5.本发明克服现有技术在进行以分钟计的三维时空波浪预报上的不足,提出一种由集成惯性导航模块的船载激光雷达、波面点云数据处理模块、三维波浪场时空重构算法和中央处理计算机组成的近场波浪测量装置与三维波浪场时空反演重构方法。该发明测量精度高、体积小、组织灵活、适用空间范围广,可准确有效的实现以分钟计的三维时空波浪场
预报。
6.本发明目的是由以下技术方案实现的:
7.一种波浪的激光测量装置,该装置包括:激光雷达、波面点云数据处理模块、中央处理计算机,其中,激光雷达上集成有惯性导航模块,激光雷达和波面点云数据处理模块共同安装于艏部高桅杆处,安装高度、方向和角度由浮体尺寸和波浪情况确定;中央处理计算机固定于中央控制中心,通过无线和/或有线方式接收来自数据处理模块的波浪点云数据并进行分析与可视化。
8.进一步的,本发明目的还可以由以下技术方案实现:
9.一种三维波浪场时空反演重构方法,利用所述一种波浪的激光测量装置进行三维波浪场时空反演重构计算,包括如下步骤:
10.1)地球坐标系下三维波面点云数据的采集
11.a1、建立用于描述点坐标的地球坐标系o-xyz和随体坐标系o
’‑
xyz,地球坐标系与大地固结,坐标原点为浮体重心,随体坐标系与激光雷达固结,其坐标原点为雷达中心o’,x轴由船尾指向船艏,y轴由左舷指向右舷,z轴由雷达底部垂直指向顶部;
12.b1、将激光雷达安装于艏部高桅杆处,其安装高度h和角度β满足如下关系式:
[0013][0014]
式中,lm为激光雷达锥形测量覆盖区域中心到船艏柱的距离,通常取5~10倍的典型波长,d为船舶型深,d为船舶吃水;
[0015]
c1、采用安装完成的激光雷达测量三维波面点云,激光雷达以一定脉冲频率发射一簇脉冲激光形成锥形测量区域覆盖于波浪自由表面,依据激光测距原理计算得到随体坐标系下波面各个激光反射点的坐标p
0i
(x,y,z,t),所有反射点组成了波面点云坐标集{p
0i
(x,y,z,t)};
[0016]
d1、通过集成于激光雷达上的惯性导航模块同步测量得到雷达相对于地球坐标系的六自由度运动(x,y,z,θ,ψ),并由六自由度运动得到坐标变换矩阵ni(t):
[0017][0018]
e1、在波面点云数据处理模块中采用坐标变换算法将波面点云坐标集由随体坐标p
0i
(x,y,z,t)变换为地球坐标p
ei
(x,y,z,t):
[0019]
{p
ei
}={ni(t)}{p
0i
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(iii)
[0020]
由此,基于激光雷达和数据处理模块完成了地球坐标系下三维波面点云数据的采集;
[0021]
f1、波面点云数据处理模块通过无线和/或有线数据传输方式将采集到的三维波面点云坐标集{p
ei
}发送到中央处理计算机进行波浪场重构与可视化;
[0022]
2)时空波浪场的重构与可视化
[0023]
a2、三维波浪场时空重构算法基于三维非线性波浪模型实现,模型基于流体控制方程和发展方程建立:
[0024]
控制方程:
[0025]
其中,η(x,y,t)为三维波浪场,φs(x,y,z=η,t)为自由表面速度势,将三维波浪场和自由表面速度势展开为:
[0026][0027]
式中ηn为展开不同波数k下的自由波幅,为展开各阶速度势,将(v)代入式(iv)中得到发展方程:
[0028][0029]
三维波浪场时空重构算法首先将接收到的三维波面点云坐标集{p
ei
}进行三维拟合得到了t0时刻的三维波浪场η(x,y,t0)和自由表面速度势φs(x,y,z=η,t0);
[0030]
b2、通过傅里叶变换得到不同波数k下的自由波幅ηn和各阶速度势以此作为三维非线性波浪模型发展方程(vi)的输入,
[0031]
c2、通过四阶龙格库塔方法对发展方程(vi)进行时间积分,从而完成波浪场重构,得到各时刻t浮体周围的三维波浪场η(x,y,t)和自由表面速度势φs(x,y,z=η,t);
[0032]
d2、在中央处理计算机中对波浪场η(x,y,t)进行统计分析得到浮体近场波浪的统计要素:有义波高hs、谱峰周期tp和谱密度分布sp(ω);
[0033]
e2、由中央处理计算机进行时空波浪场η(x,y,t)与波浪统计要素的可视化显示,得到重构的三维时空波浪场。
[0034]
本发明的工作原理:
[0035]
本发明首先利用船载的激光雷达装置实时获取波面点云数据,具体的由激光雷达的激光器向波面发射一簇脉冲激光,激光达到波面后反射回到雷达接收器中,根据激光测距原理可得到雷达到目标点的距离和方向角,如此可得到随体坐标系下的实时波面点云坐标集;然后,借助集成在激光雷达上的惯性导航模块测量浮体的六自由度运动,采用数据处理模块基于此六自由度运动对随体坐标系下的波面点云进行坐标变换,得到地球坐标系下波面点云坐标集并无线发送至中央处理计算机;进而,在中央处理计算机中运行三维波浪场时空重构算法,以地球坐标系下的波面点云坐标集为输入条件,采用三维非线性波浪模
型反演得到重构的浮体周围三维波浪场η(x,y,t),依据重构的时空波浪场得到近场波浪统计要素:有义波高hs、波浪周期t
p
和波浪能量谱s
p
(ω),并将时空波浪场与波浪统计要素在船载计算机上进行可视化显示。
[0036]
有益效果
[0037]
本发明形成一种波浪的船载激光雷达测量装置与三维波浪场时空反演重构方法,有别于传统的波浪浮标和测波雷达方法,本发明采用的激光雷达技术具有高时空分辨率的优势,能够实现一定区域波高的高频率实时采集,满足以分钟计的三维时空波浪预报需求,优势明显。
[0038]
在激光雷达测波方面,本发明有别于专利cn109490906a中需要在水面上布置漂浮块作为反映波面升高的观测介质,本发明采用激光雷达直接观测波面,克服了对漂浮块的布置需求以及漂浮块数量与随波性的不足,可以通过更加简单的系统实现更高精度以分钟计的三维时空波浪场观测。克服专利cn113219481a中仅能进行固定状态下近岸破波区波浪测量的不足,本发明采用集成惯导模块的激光雷达,可以在船载波浪测量中剔除浮体六自由度运动的影响,实现浮动状态下整体近场波浪的测量。
附图说明
[0039]
图1:集成惯性导航模块的激光雷达;
[0040]
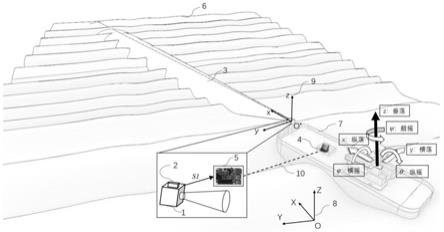
图2:坐标系定义与三维近场波浪测量装置示意图;
[0041]
图3:激光雷达测量三维波面点云流程图;
[0042]
图4:三维时空波浪场重构流程图;
[0043]
图5:实测地球坐标系下三维波浪场点云;
[0044]
图6:三维时空波浪场重构结果可视化示意图;
[0045]
图中标号:1为激光雷达,2为惯性导航模块,3为激光照射范围,4为中央处理计算机,5为波面点云数据处理模块,6为波浪自由表面,7为浮体,8为大地固定坐标系o-xyz,9为随体坐标系g-xyz,10为无线和/或有线数据传输方式,28为实测海浪三维波浪场点云,29为三维时空波浪场。
具体实施方式
[0046]
为了能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本发明进行详细阐述。
[0047]
实施例1
[0048]
如图1~2所示,一种波浪的激光测量装置,该装置包括:激光雷达1、波面点云数据处理模块5、中央处理计算机,其中,激光雷达1上集成有惯性导航模块2,激光雷达和波面点云数据处理模块5共同安装于艏部高桅杆处,安装高度、方向和角度由浮体7尺寸和波浪情况确定;中央处理计算机固定于中央控制中心,通过无线和/或有线方式接收来自数据处理模块的波浪点云数据并进行分析与可视化。
[0049]
实施例2
[0050]
如图1~6所示,利用实施例1所述一种波浪的激光测量装置进行三维波浪场时空反演重构计算,包括如下步骤:
[0051]
1)地球坐标系下三维波面点云(28)数据的采集
[0052]
首先将集成惯性导航模块2的激光雷达1安装于浮体7艏部桅杆处,雷达锥形覆盖区域3照向波面(如图2示),测量时设置锥形覆盖区域3顶角α为14.5
°
,锥形长度(即最大测量距离)l为200m。然后,已知观测海域典型波长为10m,设定锥形测量覆盖区域3中心到船艏柱的距离lm为5倍的典型波长即50m,测试船舶型深d为8m,吃水d为3m,激光雷达安装在艏部桅杆处,安装高度(距离甲板)h为1.5m,由此依据式(i)给出的关系式确定激光雷达安装角度(与水平方向夹角)β为7.4
°
;
[0053]
其次采用安装完成的激光雷达1以10hz的脉冲频率发射一簇脉冲激光形成锥形测量区域3覆盖于波浪自由表面6,得到随体坐标系下波面各个激光反射点的坐标集{p
0i
(x,y,z,t)},现场观测中坐标集包含24000个坐标点;然后,依据图3所示流程11、12、13、14、15测量得到地球坐标系下三维波面点云坐标集{p
ei
},图5为现场实测得到的一个时刻的实测海浪三维波浪场点云28;最后,数据处理模块5通过无线和/或有线数据传输方式10将采集到的三维波面点云坐标集{p
ei
}发送到中央处理计算机4。
[0054]
2)时空波浪场的重构与可视化
[0055]
首先,采用中央处理计算机4运行三维波浪场时空重构算法,依据图4中的流程16~27,进行时空波浪场的重构,得到各时刻t浮体周围的三维波浪场η(x,y,t)和自由表面速度势φs(x,y,z=η,t);
[0056]
然后,在中央处理计算机4中对实测海域三维波浪场η(x,y,t)采用波高直接计数方法进行统计分析得到浮体近场波浪的统计要素:有义波高hs为1.8m、谱峰周期tp为4.6s,采用傅里叶变换方法得到谱密度分布sp(ω)满足ittc双参数谱;最后,由中央处理计算机4进行三维波浪场η(x,y,t)与波浪统计要素的可视化显示,如图6所示,图6是依据图5波面点云坐标集重构的三维时空波浪场29。
[0057]
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1