一种全向覆盖多波束探测雷达系统的制作方法
1.本发明涉及一种全向覆盖多波束探测雷达系统,该设备适用于飞鸟等低空慢速小(“低慢小”)目标的探测,属于探测雷达技术领域。
背景技术:
2.鸟击是指鸟类和飞行器发生碰撞,对飞行器造成损害的事件。一方面,随着航空技术的发展,越来越多的人选择乘坐飞机出行。据中国民航统计数据显示,2018年中国民航旅客运输量达到6.1亿人次,航线总数为4206条,相比2017年,旅客运输量增长10.9%,新增国际航线167条。另一方面,随着生态环境的逐渐恢复,截至目前,我国鸟类已达近1200种,占世界总数的1/8,且鸟类数量连续数年保持亚洲第一。面对日益增长的航空客运量与鸟类种类和数目,航空安全不仅仅是体现航空发展的重要标准,也是关乎国计民生的重大问题。
3.利用雷达技术,理论上可以对机场附近的鸟类进行全天时,全天候的探测。其原理是将雷达设备安置于机场,对雷达覆盖范围内的场景目标进行探测,从而及时发现目标,对其采取相应的驱鸟措施。
4.然而,鸟类目标具有可观测性低、飞行速度慢、飞行高度低、rcs小和机动性强等特点,是典型的“低慢小”目标,加之现代城市环境复杂,因此对这类目标的探测带来了巨大的挑战。针对此情况,研发一款对鸟类目标探测能力强的设备迫在眉睫。
5.国外的探鸟雷达技术经过三十余年的发展,已经取得了较大的成果。目前美国、加拿大和荷兰已经研究出了相对成熟的探鸟雷达。而国内由于起步较晚,在该领域的发展落后于国外。
6.美国的merlin雷达配备两部不同波段的雷达,一部x波段雷达用于对垂直方向进行扫描,还有一部s波段雷达进行水平扫描,整个雷达均采用t型波导阵列天线。但由于水平和垂直扫描的两部雷达设备波束覆盖范围较小,因此该雷达不属于严格意义上的三坐标雷达。merlin雷达大多数情况被配置在机场的跑道附近。其水平扫描雷达负责对覆盖范围内的周边环境进行扫描,但不提供目标的高度信息,只起到预警作用,竖直方向的另一部雷达设备与机场跑道成一条直线,使其扫描范围能够覆盖飞机的起飞和降落,且此时能起到三坐标雷达的作用,获得目标的高度。
7.加拿大研发的accipiter系列雷达采用x波段抛物面天线对鸟类目标进行探测,俯仰波束较窄(主瓣宽度仅为4
°
),俯仰覆盖范围0~30
°
。因此,虽然其拥有较窄的波束,可以获得目标精确的高度,但覆盖范围小,有较大的局限性。
8.荷兰robin雷达与美国merlin雷达一样,由多部雷达组成。在水平方向,robin雷达采用s波段水平扫描,其转速(45r/min)在机械扫描雷达中属于极快水平;竖直方向采用x波段天线对空域进行垂直扫描,但波束宽度较宽(20
°
),因此目标的高度信息不够精确。同时,robin雷达配备一部fmcw雷达,其工作模式有三种:(1)扫描模式:对俯仰和方位进行同时扫描;(2)凝视模式:对用户指定的范围进行观测;(3)跟踪模式:对用户指定的目标进行实时跟踪。
9.综合上述内容,美国、加拿大和荷兰等较为发达的国家已经进行了深入研究,研发了较为成熟的探鸟雷达系统,从而实现机场鸟情的探测,主要的技术指标和功能特点见表1。
10.表1国外鸟情探测雷达主要技术指标
[0011][0012]
近年来,国内对于探鸟雷达的研究也逐渐升温,多所高等院校和研究所均进行了相关研究,但大多数研究结果仍未能实际应用于机场。
技术实现要素:
[0013]
为了解决现有的探鸟雷达均未能对周围环境进行全向覆盖,在大扫描角度下存在性能下降的明显问题,以及鸟类属于典型的“低慢小”目标,传统的扫描模式会导致雷达波束在目标处的有效驻留时间较少,从而出现速度模糊的问题,本发明提供一种可实现方位全向覆盖且能够获得目标精确的多普勒和角度信息的雷达系统。
[0014]
本发明所述为一款基于全向覆盖的多波束探测雷达系统,整个系统包括圆柱形相控阵天线阵列、综合控制模块、频综模块、数字接收波束形成模块(即dbf模块)及数字信号处理模块。整个雷达系统各个模块之间的连接如图1所示,各个模块之间依次连接,组成整个雷达系统。
[0015]
频综模块产生射频激励信号并送至圆柱形相控阵天线阵列,圆柱形相控阵天线阵列用于信号的发射与接收;当有目标时,圆柱形相控阵天线阵列接收到回波并将多通道数据传送至数字接收波束形成模块进行接收波束dbf,完成接收波束dbf后将得到的数据传送
至数字信号处理模块,数字信号处理模块对得到的数据处理后得到目标的信息,并将目标点迹通过综合控制模块输出显示。
[0016]
本发明所述的圆柱形相控阵天线阵列共有m*n个阵元,所有阵元均匀分布在圆柱形阵面上。其中,圆柱阵面上共n个圆环均匀分布在圆柱面上,每个圆环共m个阵元(也可理解为共m条竖直放置的线阵均匀分布在圆柱面上,每条线阵由n个阵元组成)。整个阵列的所有阵元均能够完成信号的接收与发射。本设计将每列线阵看作一个tr组件,故整个阵列工作时共m个tr组件同时进行工作。当tr组件进行工作时,通过幅度与相位加权来控制发射信号的强度与指向。
[0017]
本发明所述的综合控制模块用于实现操作者对雷达系统的控制,包括设置雷达的工作模式、控制tr组件的工作与关闭、控制dbf(数字波束形成)及数字信号处理模块的工作,从而得到目标的点迹和航迹信息,并对其进行输出。
[0018]
本发明所述的频综模块用于产生da时钟、基带信号、本振及校准信号,并提供tr组件上的天线单元向空中辐射电磁波。其中,频综通过da时钟产生原始基带信号;基带信号通过频综产生的本振信号进行上变频产生射频激励信号;校准信号用于实现对各个通道的相位校准。
[0019]
本发明所述的数字接收波束形成模块用于对接收数据进行dbf,从而实现和/差波束、低副瓣天线、自适应零点、匿影天线等功能,并将合成的数字波束传递给数字信号处理模块。
[0020]
本发明所述的数字信号处理模块用于实现对dbf后的数字信号进行信号处理,包括脉冲压缩、脉冲多普勒处理、cfar检测从而提取目标的距离、速度信息,并利用单脉冲测角技术实现目标的角度测量,最后通过点迹凝聚、航迹起始、预测和管理实现对目标点迹和航迹的输出。
[0021]
上述鸟情探测雷达系统的目标探测过程遵循以下步骤:
[0022]
s01:本发明所述的圆柱形相控阵雷达中,将分布在圆柱面上的m个n元均匀线性阵列按顺序进行编号,分别为1、2、3
……
m。根据之前的叙述,每个均匀线阵对应一个tr组件,故tr组件编号与线阵编号相同。由于每个均匀线阵均完全相同,故对于一个均匀线阵,将其内部的阵元进行编号,分别为1、2、3
……
n。
[0023]
s02:本发明所述的圆柱形相控阵雷达与传统的扫描式相控阵雷达有所不同,其特点在于:方位向采取凝视工作模式,俯仰采取波束扫描模式。通过控制列天线中各个通道的发射信号相位,控制俯仰向波束分时指向不同俯仰角,例如,当需要俯仰维6个波位在t1、t2、t3、t4、t5、t6时刻分别指向2
°
、10
°
、18
°
、27
°
、36
°
、45
°
时,分别控制列天线中各个通道的相位,时所有的列天线在t1、t2、t3、t4、t5、t6时刻分别指向2
°
、10
°
、18
°
、27
°
、36
°
、45
°
;通过控制360
°
方位中每一列天线采用相同的幅度相位,在方位向上形成360
°
全向辐射方向图。
[0024]
s03:若雷达的探测范围有目标存在,则电磁波在遇到目标后会进行发射,所产生的回波会被雷达上的阵元所接收。本发明采用单脉冲技术来获得目标的角度信息,因此通过dbf技术来获得和差波束。
[0025]
单个tr和差波束形成:根据之前的叙述。每个tr为一列均匀线阵,共n个阵元。将每个tr均分为上下两个半阵,当阵列接收到回波时,首先对其进行俯仰低副瓣处理,然后将上下两部分子阵相加减,分别得到tr和差波束。
[0026]
子阵和差波束形成:首先,对接收方向图的形成进行说明。当得到每个tr的和差波束后,选取其中相邻的k个tr进行一个子阵(记为子阵1)和差波束的形成,完成该子阵和差波束形成后,对其进行步长为1个阵元的滑窗处理,得到的新子阵记为子阵2,对其按相同的方法进行和差波束形成后继续滑窗,以此类推,最终得到m个子阵。为了实现对目标的角度测量,需要得到每个子阵的和差波束。其中,每个子阵包含一个子阵和波束与两个子阵差波束(俯仰差波束与方位差波束)。首先,将每个子阵均分为左右两个半阵(左半阵记为a,右半阵记为b),子阵和波束的形成方法就是将a和b两个半阵中包含的tr和波束进行相加;子阵俯仰差波束就是把a和b两个半阵中包含的tr差波束进行相加;子阵方位差波束就是将a和b两个半阵中包含的tr和波束相减。由此,可得到子阵和波束、子阵俯仰差波束与子阵方位差波束。
[0027]
s04:进一步,根据子阵和差波束进行数字信号处理,可得到目标的距离,速度方位信息。
[0028]
s05:根据s04的结果,将目标的点迹与航迹进行输出。
[0029]
有益效果
[0030]
本发明与现有应用相比,具有以下优点和特征:
[0031]
(1)采用相控阵体制,波束形成灵活且快速,抗干扰能力强;
[0032]
(2)采用圆柱阵形式,能够实现方位全向覆盖且探测威力均匀、探测性能稳定;
[0033]
(3)采用凝视体制实现波束的宽发窄收,通过在目标位置长时间驻留来达到长时间积累,提升回波的信噪比。
附图说明
[0034]
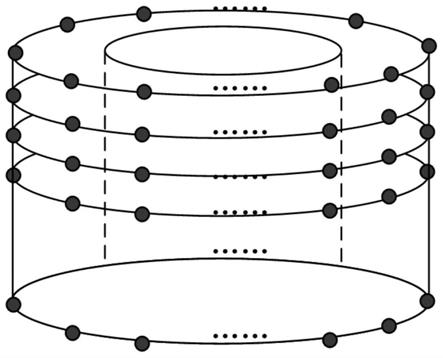
图1-本发明所述的圆柱型相控阵雷达阵列单元布局示意图;
[0035]
图2(a)-本发明所述的雷达系统在凝视模式下方位波束发射波束示意图;
[0036]
图2(b)-本发明所述的雷达系统在凝视模式下方位波束接收波束示意图;
[0037]
图3-本发明所述的全向覆盖多波束探测雷达系统框图;
[0038]
图4-本发明所述的全向覆盖多波束探测雷达系统工作流程图;
[0039]
图5-本发明所述雷达系统信号处理流程图;
具体实施方式
[0040]
下面结合附图,对本发明所述系统的组成及工作方式做进一步解释。
[0041]
图1是本发明所述的圆柱型相控阵雷达阵列单元布局示意图。雷达系统选用圆柱型二维有源相控阵体制,由m
×
n个相同的阵元所组成。每层圆环共m个阵元,共n层圆环均匀分布在圆柱阵面。圆柱阵相邻层之间的高度差h和半径r大小应满足使阵列扫描时阵列的方向图不产生栅瓣(h≤λ/2,m≥4πr/λ,其中λ为波长)。
[0042]
图2是本发明所述的雷达系统在凝视模式下方位波束发射与接收示意图。
[0043]
在形成方位发射波束时:如图2(a)所示,圆柱阵雷达将m个线阵进行等幅同向同时发射,在方位形成全向覆盖。
[0044]
接收时,如图2(b)所示,m个线阵同时接收,经过dbf后同时形成若干个方位波束,覆盖整个方位。该模式的优点是采用全息凝视处理方式,对目标位置波束驻留时间长,速度
分辨率高,可大大提高慢速目标探测能力和目标识别能力。图3是本发明所述的一种全向覆盖多波束探测雷达系统框图。
[0045]
雷达工作时,首先频综通过da时钟产生原始基带信号,基带信号通过频综产生的本振信号进行上变频产生射频激励信号并送至圆柱阵,圆柱阵通过阵列天线完成电磁波对目标空域的辐射。
[0046]
当有目标时,发射的电磁波会由于反射产生回波。回波到达阵列天线后,阵列天线接收到回波并将多通道数据传送至dbf模块进行接收波束dbf,完成接收波束dbf后将得到的数据传送至数字信号处理模块,数字信号处理模块对得到的数据进行脉冲压缩,脉冲多普勒处理,cfar检测等操作,得到目标的信息,并将目标点迹通过综合控制模块输出到显示屏上。
[0047]
整个过程中,综合控制模块对其他模块都起到了控制作用。如控制tr组件的开关、dbf模块和dsp模块的运行等等。
[0048]
图4是本发明所述的全向覆盖多波束探测雷达工作流程图。具体工作流程如下:
[0049]
s01:雷达处于工作模式下,综合控制模块控制频综和圆柱阵列,通过阵列天线向空域辐射电磁波来进行发射。
[0050]
发射波束形成方案为:通过控制列天线中各个通道的发射信号相位,控制俯仰向波束分时指向不同俯仰角,例如,当需要俯仰维6个波位在t1、t2、t3、t4、t5、t6时刻分别指向2
°
、10
°
、18
°
、27
°
、36
°
、45
°
时,分别控制列天线中各个通道的相位,时所有的列天线在t1、t2、t3、t4、t5、t6时刻分别指向2
°
、10
°
、18
°
、27
°
、36
°
、45
°
;通过控制360
°
方位中每一列天线采用相同的幅度相位,在方位向上形成360
°
全向辐射方向图。
[0051]
s02:当目标出现在雷达辐射范围内时,阵列天线接收到目标的回波。此时阵列天线将m个tr所接收到的回波数据传输到dbf模块,进行dbf处理。首先,dbf模块对m个tr的回波进行每个tr的和差波束的形成,此过程在实施过程中包含了俯仰维的低副瓣处理。
[0052]
s03:在产生tr和差波束后,选择相邻的k个tr作为一个接收子阵。沿着该子阵滑窗一次(步长为一个tr)便形成一个新的子阵,共需进行m次滑窗,形成子阵m个。
[0053]
s04:为获得目标精确的角度信息,本系统采取和差单脉冲测角方法进行目标角度测量。由此,为获得子阵和差波束,需要对s503中的m个子阵进行子阵和差dbf。首先是子阵和波束形成,对第i(i=1、2、3
……
m)个子阵进行和波束形成时,将子阵均分为左右两个半阵,左右两部分的tr和波束相加即可得到子阵和波束。然后是子阵俯仰差波束形成,将子阵均分为左右两个半阵,左右两部分的tr差波束相加即可得到子阵俯仰差波束。最后是子阵方位差波束形成,将子阵均分为左右两个半阵,左右两部分的tr和波束相减即可得到子阵方位差波束(在方位接收波束形成过程中,包含了方位低副瓣的处理)。
[0054]
上述步骤s03、s04由数字接收波束形成模块(图3中dbf模块)实现。
[0055]
s05:对子阵和差波束分别进行脉冲压缩、、脉冲多普勒处理。在经过处理后,可由经过处理后的和通道数据得到p-d平面(脉冲-多普勒平面),对p-d平面进行cfar检测,点迹凝聚,即可得到目标的点迹。
[0056]
s06:s05步骤后,根据得到的目标点迹,可计算得到目标的距离和速度信息。再通过和差单脉冲测角方法,得到目标的方位和俯仰角。
[0057]
s07:经过多个cpi的处理,即可得到目标的多个点迹。通过航迹起始、预测和管理,
即可得到目标的点迹与航迹,并将其输出到显示屏上。
[0058]
图5是本发明所述的一种全向覆盖多波束探测雷达系统信号处理流程图,该过程由数字信号处理模块实现。
[0059]
具体信号处理步骤如下:
[0060]
s01.对dbf得到的子阵和差通道数据进行快时间维的脉冲压缩(脉冲压缩即将时域回波信号与参考信号进行匹配滤波),提升回波的信噪比。
[0061]
s02.在完成脉冲压缩后,对得到的数据在慢时间维进行pd(脉冲多普勒)处理(常用的方法是对脉冲压缩后的数据沿慢时间维进行fft处理)。经过脉冲压缩和脉冲多普勒处理后,可从和通道数据得到p-d(脉冲-多普勒)平面。
[0062]
s03.在得到p-d平面后,可进一步对其进行恒虚警(cfar)检测和点迹凝聚,得到目标的点迹。
[0063]
s04.针对cfar检测和点迹凝聚处理后得到的目标点迹进行计算,得到目标的斜距和径向速度信息。
[0064]
s05.通过和差单脉冲测角方法,得到目标的角度信息(包含方位角与俯仰角),配合上一步中得到的目标信息,即可得到目标的相对于雷达的坐标位置。
[0065]
s06.通过雷达数据处理,得到目标的点迹与航迹。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1