声学空速传感器和处理技术的制作方法
声学空速传感器和处理技术
背景技术:
1.在航空中,空速(airspeed)被定义为航空器相对于周围空气的速度。空速可以被报告为从风速计读取的指示空速(ias)。空速可以被进一步报告为校准空速(cas)、等效空速(eas)和真实空速(tas),其中的每个都基于初始ias。空速的准确测量对航空器功能是至关重要的,因为空速影响航空器的升力和阻力。
2.传统上用于测量航空器中的空速的设备是皮托管探头(pitot probe),即具有两个孔的细长管,当没有出口允许气流继续时,在使移动的空气停止(停滞)时,其间接确定停滞压力。实际上,皮托管探头被放置在航空器的外部上的气流中,其中前孔测量停滞压力,并且侧孔测量静压。然后可以进一步计算停滞压力和静压之间的差异来确定空速。皮托管探头有缺点在于在飞行期间它们可能变得堵塞,特别是被冰堵塞,使得皮托管探头的读数不准确。不准确的皮托管探头读数可能严重削弱飞行员有效驾驶航空器的能力,并可能导致坠机。
3.除了皮托管探头之外,现代航空器通常使用不同的和/或冗余的方法/设备来测量空速。为此,已经开发了超声波风速计,也称为声学或声波风速计。通常与航空器的外表面齐平或接近齐平设置(built)的这些设备,基于一对或多对换能器之间的声波脉冲的时序来测量航空器速度,因为声脉冲的飞行时间被气流的方向改变。基于超声波风速计读数的空速的粗略计算可以通过测量换能器对的声音传播中的差异来计算。当前,用于确定空速的计算没有准确考虑边界层(即航空器的表面的紧邻附近中的空气的速度),最终降低了空速测量的准确性。因此,期望提供一种避免传统方法的缺点的系统或方法。
技术实现要素:
4.一种声学空速传感器系统可以包括:至少一个声学发射器,其被配置成提供声学脉冲;多个声学接收器,其至少包括:第一声学接收器,其位于距至少一个声学发射器第一径向距离处;以及第二声学接收器,其位于距至少一个声学发射器第二径向距离处;以及第三声学接收器,其位于距至少一个声学发射器第三距离处。第一声学接收器被配置成在第一时间处接收声学脉冲,并输出第一接收器信号。第二声学接收器被配置成在第二时间处接收声学脉冲,并输出第二接收器信号。第三声学接收器被配置成在第三时间处接收声学脉冲,并输出第三接收器信号。传感器系统可以包括计算单元,其可操作地连接到第一声学接收器、第二声学接收器和第三声学接收器。计算单元被配置成:接收第一接收器信号、第二接收器信号和第三接收器信号,确定在接收第一接收器信号和由声学发射器发射声学脉冲之间的第一传播时间,确定在接收第二接收器信号和由声学发射器发射声学脉冲之间的第二传播时间,接收或确定风角(wind angle),确定在接收第三接收器信号和由声学发射器发射声学脉冲之间的第三传播时间,接收或确定风角,基于第一传播时间、第二传播时间和风角确定空速,并输出指示空速的空速信号。
5.在系统的一些实施例中,计算单元包括一个或多个传播测量模块,所述传播测量模块可操作地连接到脉冲控制模块和第一声学接收器、第二声学接收器或第三声学接收器
中的至少一个。在一些实施例中,脉冲控制模块被可操作地连接到至少一个声学发射器并且被配置成使得至少一个声学发射器在发送时间处发送声学脉冲,其中一个或多个传播测量模块被配置成比较发送时间和第一时间以确定第一传播时间并输出第一传播数据。在一些实施例中,一个或多个传播测量模块被配置成比较发送时间和第二时间以确定第二传播时间并输出第二传播数据,其中一个或多个传播测量模块被配置成比较发送时间和第三时间以确定第三传播时间并输出第三传播数据。
6.在系统的一些实施例中,计算单元包括风角模块,所述风角模块可操作地连接到一个或多个传播测量模块以接收第一传播数据、第二传播数据和第三传播数据,并且被配置成基于所述第一传播数据、所述第二传播数据和所述第三传播数据来确定风角并输出风角数据。
7.在系统的一些实施例中,计算单元包括空速模块,所述空速模块可操作地连接到风角模块以从其接收风角数据,其中空速模块被可操作地连接到一个或多个传播测量模块以接收第一传播数据、第二传播数据和第三传播数据,其中空速模块被配置成基于风角、第一传播数据、第二传播数据和第三传播数据来确定空速,并输出空速信号。
8.在系统的一些实施例中,计算单元包括声速模块,所述声速模块可操作地连接到空速模块以接收空速信号,其中声速模块被可操作地连接到一个或多个传播测量模块以接收第一传播数据、第二传播数据和第三传播数据,其中声速模块被可操作地连接到一个或多个传播测量模块以接收第一传播数据、第二传播数据和第三传播数据,其中声速模块被可操作地连接到风角模块以接收风角数据,其中声速模块被配置成基于风速数据、第一传播数据、第二传播数据和第三传播数据来确定声速,并输出声速数据。
9.在系统的一些实施例中,声速模块被配置成根据声速来确定马赫数并输出马赫数信号。
10.在系统的一些实施例中,计算单元包括静态空气温度模块,所述静态空气温度模块可操作地连接到声速模块,以接收声速数据,以基于声速来确定静态空气温度,并输出静态空气温度信号。
11.在系统的一些实施例中,计算单元包括在计算单元的一个或多个传播测量模块和至少一个其他模块之间的多路复用器,所述多路复用器被配置成接收来自一个或多个传播测量模块的第一传播数据、第二传播数据和第三传播数据并对所述第一传播数据、第二传播数据和第三传播数据进行多路复用。
12.在系统的一些实施例中,第一径向距离、第二径向距离或第三径向距离中的两个是等效的。
13.在系统的一些实施例中,第一声学接收器、第二声学接收器或第三声学接收器中的至少一个包括微机电系统麦克风。
14.在系统的一些实施例中,计算单元被配置成通过设置针对响应的最大时间来确定声学接收器是否被遮蔽,并且忽略来自遮蔽的声学接收器的一个或多个信号。
15.在系统的一些实施例中,处理器使用波束成形算法。
16.在系统的一些实施例中,波束成形算法包括经典算法、capon算法、music算法、root-music算法、bartlett算法、espirit算法、min-norm算法、burg算法、samv算法、welch算法、时间反转music算法、mvdr算法、akaike信息准则算法或最小描述长度(mdl)准则算
法。
17.在系统的一些实施例中,至少一个声学发射器和多个声学接收器中的至少一个被配置为齐平安装在航空器的表面上。
18.一种计算机实现的方法可以包括:使用至少一个声学发射器来发射声学脉冲;在第一时间处,使用位于距至少一个声学发射器第一径向距离处的第一声学接收器接收声学脉冲;以及响应于接收到声学脉冲,从第一声学接收器提供第一接收器信号。该方法可以包括:在第二时间处,使用位于距至少一个声学发射器第二径向距离处的第二声学接收器接收声学脉冲;以及响应于接收到声学脉冲,从第二声学接收器提供第二接收器信号。该方法可以包括:在第三时间处,使用位于距至少一个声学发射器第三径向距离处的第三声学接收器接收声学脉冲;以及响应于接收到声学脉冲,从第三声学接收器提供第三接收器信号。该方法可以包括确定在接收第一接收器信号和由至少一个声学发射器发射声学脉冲之间的第一传播时间。该方法可以包括确定在接收第二接收器信号和由至少一个声学发射器发射声学脉冲之间的第二传播时间。该方法可以包括确定在接收第三接收器信号和由至少一个声学发射器发射声学脉冲之间的第三传播时间。该方法可以包括基于以下各项中的至少一个来构建传播函数:至少一个声学发射器相对于第一接收器、第二接收器、第三接收器中的至少一个的位置;第一接收器信号、第二接收器信号或第三接收器信号中的至少一个的幅度;或者第一接收器信号、第二接收器信号或第三接收器信号中的至少一个的相位。该方法可以包括接收或确定风角。该方法可以进一步包括基于传播函数和第一传播时间、第二传播时间、第三传播时间或风角中的至少一个来确定空速,并输出指示空速的空速信号。
19.本发明内容仅作为对在具体实施方式和附图中充分描述的主题的介绍来提供。发明内容不应被认为描述了基本特征,也不应被用来确定权利要求的范围。此外,要理解,前述发明内容和下面的具体实施方式两者都只是示例和解释性的,并且不一定限制所要求保护的主题。
附图说明
20.参考附图描述了详细描述。在说明书和附图中的不同实例中使用相同的参考编号可以指示相似或相同的条目。在以下详细描述和附图中公开了本公开的各种实施例或示例(“示例”)。附图不一定按比例。通常,除非权利要求中另外规定,否则所公开的过程的操作可以以任意次序执行。在图中:图1a是根据本公开的一个或多个实施例的空气数据传感器的俯视图,其示出了发射器和接收器布局的实施例。
21.图1b是根据本公开的一个或多个实施例的空气数据传感器的俯视图,其示出了发射器和接收器布局的实施例。
22.图2是描绘了根据本公开的一个或多个实施例的在各种空速(如所示,v=0、60、120、180和240)下声学发射器和声学接收器之间的飞行时间的极坐标图。
23.图3是描绘根据本公开的一个或多个实施例的相对声学接收器之间的飞行时间差异的曲线图。
24.图4是根据本公开的一个或多个实施例的针对声学空气数据传感器的第一示例的系统和软件框图。
25.图5是根据本公开的一个或多个实施例的声学空气数据传感器的脉冲时序图。
26.图6描绘了根据本公开的一个或多个实施例的声学空气数据传感器的等效子系统。
27.图7是根据本公开的一个或多个实施例的具有不受限制的气流的声学空气数据传感器的俯视图。
28.图8是根据本公开的一个或多个实施例的针对声学空气数据传感器的第二示例的系统和软件框图。
29.图9是根据本公开的一个或多个实施例的声学迎角(angle-of-attack)过程的流程图。
30.图10是根据本公开的一个或多个实施例的根据本公开的传感器或传感器系统的实施例的示意图。
31.图11是根据本公开的一个或多个实施例的具有边界层的指示的具有不受限制的气流的声学空气数据传感器的视图。
32.图12是描绘了根据本公开的一个或多个实施例的在各种空速(如所示,v=0、60、120、180和240)下在声学发射器和声学接收器之间的飞行时间的极坐标图,其示出了由于速度导致的遮蔽效应。
33.图13是根据本公开的一个或多个实施例的在航空器上放置一个或多个传感器的实施例的示意图。
具体实施方式
34.在详细解释本公开的一个或多个实施例之前,要理解,所述实施例在其应用中不限于在以下描述中阐述或在附图中图示的构造的细节和组件或步骤或方法的布置。在以下对实施例的详细描述中,为了提供对本公开的更透彻的理解,可以阐述许多具体细节。然而,对于受益于本公开的本领域普通技术人员来说,将显而易见的是,本文中公开的实施例可以在没有这些具体细节中的一些的情况下实施。在其他实例下,可能不详细描述众所周知的特征,以避免不必要地使本公开复杂化。
35.如本文中所使用的,参考编号后面的字母旨在参考特征或元件的实施例,该特征或元件可以类似于但不一定相同于具有相同参考编号(例如,1、1a、1b)的先前描述的元件或特征。这样的速记符号仅用于方便的目的,并且不应被解释为以任何方式限制本公开,除非明确声明相反。
36.此外,除非明确声明相反,“或”指代包含性的或,而不是排他性的或。例如,条件a或b由以下各项中的任何一项满足:a为真(或存在)并且b为假(或不存在),a为假(或不存在)并且b为真(或存在),以及a和b两者都为真(或存在)。
37.此外,“一”或“一个”的使用可以被用来描述本文中公开的实施例的元件和组件。这样做仅仅是为了方便,并且“一”和“一个”旨在包括“一个”或“至少一个”,并且单数也包括复数,除非明显其另有含义。
38.最后,如本文中所使用的,对“一个实施例”或“一些实施例”的任何引用意味着结合该实施例描述的特定元件、特征、结构或特性被包括在本文中公开的至少一个实施例中。在说明书中不同地方中出现的短语“在一些实施例中”不一定都指代相同的实施例,并且实
施例可以包括本文中明确描述或固有存在的特征中的一个或多个,或者两个或更多个这样的特征的子组合的任何组合,以及可能不一定在本公开中明确描述或固有存在的任何其他特征。
39.装置、系统和相关联的方法涉及声学空气数据传感器。使用本文中的装置、系统和相关联的方法,允许在没有机械移动部件或阻碍气流的情况下感测风角(例如,迎角、滑移角(angle of slip)、空速)。此外,这允许高带宽和例如风角和空速的更新速率测量。
40.图1a是声学空气数据传感器10的俯视图,包括声学发射器12、声学接收器14a-14l、半径16、气流18和风角20(例如迎角)。虽然某些实施例可能涉及迎角,但是本领域普通技术人员理解,风角是所感测到的,其可以是迎角(aoa)、滑移角(aos)或任何其间的角度,这取决于局部流动条件(例如,由于传感器的放置和航空器的操作状态)。
41.关于确定风角(例如,aoa),在某些实施例中,声学接收器14a-14l可以被放置在声学发射器12周围的固定半径(r)处。声学发射器12可以是压电扬声器、锥形扬声器、微机电系统(mems)扬声器或其他声电换能器。声学接收器可以是麦克风,包括mems麦克风、电容式麦克风、激光器或其他声电换能器。
42.声学接收器14a-14l可以分别以0
°
、30
°
、60
°
、90
°
、120
°
、150
°
、180
°
、210
°
、240
°
、270
°
、300
°
和330
°
放置,如所示的那样。本文中考虑接收器的任何其他合适的编号或定位。可以对声学接收器14a-14l中的每个测量由声学发射器12发射的声学脉冲的飞行时间()或相位调制。例如,从声学发射器(t)12到以角度θ放置的声学接收器(r
θ
)14a-14l中的每个的声学脉冲的飞行时间由下式给出: (方程1)其中c0是声速,α是迎角20
°
,并且v是气流18的空速。题为“acoustic airspeed sensors”的美国专利第10,739,371号中公开了声学接收器14和发射器12的类似布置,该专利通过引用整体地并入。
43.如方程1中所示,飞行时间受空速和风角20影响。半径r是恒定的,其中声学接收器14a-14l位于固定半径16处,并且与声学发射器12成角度。空气中的声速不受风角或空速影响。因此,对于已知的空速,影响声学脉冲到声学接收器14a-14l的飞行时间的唯一变量是风角20。
44.声学接收器14可以被放置在相对于发射器12的任何点处,并且可以具有任何对称、非对称或随机的组织。图1b是非对称声学空气数据传感器21的俯视图,包括发射器12、声学接收器14m-14r、气流18和风角20(例如迎角)。声学接收器对(例如,14m/14n、14o/14p。14q、14r)沿非对称声学空气数据传感器21的表面平面以相对于x轴的角度(例如,θ1、θ2和θ3)随机放置,其在每对声学接收器14之间具有不同的距离(例如,d1、d2和d3)。在一些实施例中,发射器12和两个或更多个声学接收器14被布置在一条线内(例如,直线可以穿过发射器和两个或更多个声学接收器14,如图1b中那样)。在一些实施例中,只有一个声学接收器14与发射器12被布置在一条线上。声学接收器14和发射器12的任何布置是可能的。因此,以上描述不应被解释为对本公开的限制,而仅作为说明。
45.图2示出了极坐标图22,包括径向轴24、角轴26、图例28和椭圆30a-30e。为了清楚和易于讨论的目的,下面在图1的声学空气数据传感器10的上下文中描述图2。
46.径向轴24指示以微秒为单位的时间。角轴26指示以度为单位的角度。图例28将椭
46f、多项式拟合电路48、过零电路50和减法电路52可以以硬件和/或软件实现。
51.图5是脉冲时序图54,包括声学发射器波形56、声学接收器波形58和相对的声学接收器波形60。声学发射器波形60可以包括声学发射器脉冲62。声学接收器波形58可以包括声学接收器脉冲64。相对的声学接收器波形60可以包括相对的声学接收器脉冲66。
52.声学发射器脉冲62表示由声学迎角传感器的声学发射器发射的声学脉冲。声学接收器脉冲64表示由第一声学接收器感测的声学脉冲。相对的声学接收器脉冲66表示由第二声学接收器感测的声学脉冲,所述第二声学接收器与第一声学接收器成180
°
,或者与第一声学接收器相对。该时序图示出了在从声学发射器发射声学脉冲与由第一和第二声学接收器中的每个感测到声学脉冲的时间之间的时间。感兴趣的区域表示在其中接收声学接收器脉冲64和相对声学接收器脉冲66的时间段。来自其他声学接收器的声学接收器脉冲可以被类似地表征(例如,诸如来自第三声学接收器的脉冲)。
53.图6描绘了声学空气数据传感器的两个不同实施例的子系统,包括延迟子系统68和互相关子系统70。延迟子系统68包括声学发射器72、声学接收器74a和74b、延迟电路76a和76b以及差分电路78。互相关子系统70包括声学接收器74a和74b、互相关电路80和最大延迟电路82。
54.延迟子系统68和互相关子系统70可以在声学风角传感器中可互换地使用。延迟子系统68表示图4的系统图42的声学迎角传感器系统的子系统。声学发射器72表示声学发射器12,声学接收器74a和74b表示声学接收器14a和14g,延迟电路76a和76b表示延迟电路16a和16b,并且差分电路78表示差分电路18a。延迟子系统68使用延迟电路76a和76b来确定在由声学发射器72发射声学脉冲和由声学接收器74a和74b接收声学脉冲之间的各个延迟。差分电路78基于各个延迟来确定声学接收器74a和74b之间的延迟差异()。
55.相比之下,互相关子系统70使用互相关电路80来使用由声学接收器74a和74b提供的信号产生相关信号(ρ)。相关信号表示由声学接收器提供的信号的互相关函数。互相关函数基于在时间上将所述信号中的一个信号移位给定量来指示两个信号有多相似。如最大延迟中所示,延迟电路82可以确定对应于延迟差异()的相关信号的峰值相关性。这可以在图5中看到,其将相对的接收器波形60在时间轴上向左移位等于延迟差异的时间将导致声学接收器脉冲64和相对的声学接收器脉冲66对准,从而导致两个信号之间的最大相关性。例如,相关电路80和最大延迟电路82可以用来代替延迟电路76a和76b以及差分电路78。在一些实施例中,相关电路80可以用来代替延迟电路76a、76b和差分电路78。
56.图7是当用于给定用途的风角具有已知的有限范围时可以使用的声学空气数据传感器84的一个示例的俯视图。在该示例中,风角极限96是
±
30
°
。声学迎角传感器84包括声学发射器86、声学接收器88a-88j、半径90、气流92、迎角94、迎角极限96和安装板98。
57.声学接收器88a-88j沿着正交于风角极限96的半径90定位。这样的实施例允许使用更少的声学接收器和/或更密集填充(densely populated)的声学接收器,而不增加声学接收器的数量。如所示,声学发射器86和声学接收器88a-88j可以被布置在安装板98上。这可以允许声学迎角传感器84的简单安装和替换,因为整个传感器可以被立即移除和替换,而不是被嵌入例如航空器机身中。在某些实施例中,声学发射器86是超声波发射器。超声波发射器将不会被乘客听到。在某些实施例中,声学接收器88a-88j可以包括高通滤波器以滤除可听噪声。如所示,气流92可以跨声学空气数据传感器84不受阻碍,从而减少气流扰动和
阻力。
58.图8是系统图100,包括声学发射器86、声学接收器88a-88j、模数转换器102a-102e、互相关电路104a-104e、最大延迟电路106a-106e、时序控制电路108、多项式拟合电路110、过零电路112和计算设备113。为了清楚和易于讨论的目的,在图7的声学空气数据传感器84的上下文中讨论系统图100。
59.时序控制电路108被配置成向声学发射器86提供脉冲命令。声学发射器86可以被配置成响应于接收到脉冲命令而发射声学脉冲。声学接收器88a-88e可以在受到空速92影响的时间延迟之后接收声学脉冲,如由方程1所示。声学接收器88a-88e向模数转换器102a-102e提供接收器信号。模数转换器102a-102e可以将接收器信号转换成数字波形。模数转换器102a-102e可以向互相关电路104a-104e提供数字波形。互相关电路104a-104e接收数字波形。互相关电路104a-104e使用数字波形确定相关信号(ρ)。相关信号表示由声学接收器提供的信号的互相关函数。互相关函数基于在时间上将所述信号中的一个信号移位给定量来指示两个信号有多相似。互相关电路104a-104e向最大延迟电路106a-106d提供相关信号。最大延迟电路106a-106d接收互相关信号。最大延迟电路106a-106d确定相关信号的峰值相关性。峰值相关性对应于声学接收器88a-88j的延迟差异()。最大延迟电路106a-106d向多项式拟合电路110提供延迟差异()。
60.多项式拟合电路110从最大延迟电路106a-106d接收飞行时间差异。每个飞行时间差异表示两个点,一个在零的任一侧上,因为该差异与相距180
°
的两个声学接收器相关联。在一个示例中,多项式拟合电路110确定关于两点的最佳最小二乘多项式拟合。在另一个示例中,多项式拟合电路48基于已知曲线确定多项式。声学接收器88a-88e以已知的角度(rθ)和已知的半径90定位。因为除了迎角和空速之外,用于确定延迟以及因此确定延迟差异的变量是已知的,所以延迟差异曲线被很好地建立。多项式拟合电路110提供多项式()。过零电路112从多项式拟合电路110接收多项式。过零电路112确定其中多项式过零的角度(α)。过零电路112向计算设备113提供其中多项式过零的角度。计算设备可以是航空器控制器、发动机控制器或其他计算设备。如本文中描述的模数转换器102a-102e、互相关电路104a-104e、最大延迟电路106a-106e、时序控制电路108、多项式拟合电路110、过零电路112和计算设备113可以以硬件和/或软件(诸如执行计算机可读存储器的指令的处理器)实现。
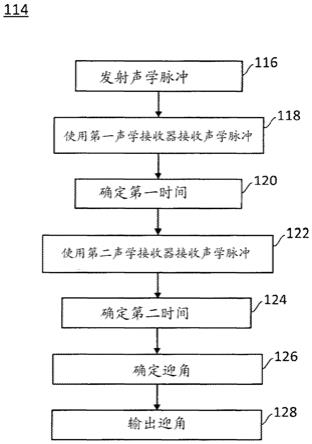
61.图9是声学风角感测过程114的实施例的流程图。为了清楚和易于讨论的目的,在图8的系统图100的上下文中讨论风角感测过程114。在步骤116处,可以由声学发射器86发射声学脉冲。在一个示例中,声学脉冲由声学发射器86响应于从时间控制电路108接收到脉冲命令而发射。在步骤118处,声学脉冲可以由声学接收器88a接收。在步骤120处,声学接收器88a可以响应于接收到声学脉冲而提供接收器信号。在步骤122处,声学接收器88f可以接收声学脉冲。在步骤124处,声学接收器88f可以响应于接收到声学脉冲而提供接收器信号。在步骤126处,可以确定第一和第二接收器信号之间的延迟差异。在一些示例中,可以使用图4的延迟电路44a和差分电路46a来确定延迟差异。在其他示例中,可以使用互相关电路104e和最大延迟电路106e来确定延迟差异。在步骤128处,基于延迟差异确定风角(例如,aoa)。在一些示例中,延迟差异可以被用于使用多项式拟合电路110来确定多项式。过零电路112可以确定多项式等于零的角度,以确定风的角度。在步骤130处,可以将风角提供给计
算设备113。在某些实施例中,计算设备113可以是航空器计算机或任何其他合适的设备。应当理解,可以使用多于两个声学接收器来确定风角。例如,第三声学接收器可以接收声学脉冲并响应声学脉冲而提供接收器信号。
62.因此,实现本公开的某些技术,声学空气数据传感器可以被用于准确地确定风角,而不会阻碍气流或使用机械移动部件。使用如本文中所述的声学空气数据传感器,提供了高带宽和迎角的更新速率测量,而无需将传感器组件直接放置在气流中。这降低了迎角传感器的结冰风险,并减少了气流扰动和阻力。
63.根据本公开的至少一个方面,考虑空气数据传感器系统500的一个或多个实施例可以被用于确定空速和/或其他空气数据参数。例如,参考图10,声学空速传感器系统500可以包括被配置成提供声学脉冲的至少一个声学发射器12(t)和多个声学接收器,例如,如图1中所示的14a-14k。一个或多个接收器可以包括位于距至少一个声学发射器12第一径向距离处(例如,操作中的下游)的至少第一声学接收器(例如,14a)和位于距至少一个声学发射器12第二径向距离处(例如,操作中的下游)的第二声学接收器(例如,14b)。
64.第一声学接收器可以被配置成在第一时间处接收声学脉冲501并输出第一接收器信号503。第二声学接收器被配置成在第二时间处接收声学脉冲501并输出第二接收器信号505。第三声学接收器被配置成在第三时间处接收声学脉冲501并输出第三接收器信号506。传感器系统500可以包括可操作地连接到第一声学接收器、第二声学接收器和第三声学接收器的计算单元507。计算单元507包括一个或多个处理器和通信地耦合到一个或多个处理器的存储器。存储器存储用于一个或多个处理器的指令,该指令指示一个或多个处理器执行本文中描述的任务。计算单元507可以在集中式组件(例如,集成电路)内或者在一组模块(每个模块包括执行具体计算任务所需的电子电路)内执行所有计算任务。
65.计算单元507被配置成接收第一接收器信号503、第二接收器信号505和第三接收器信号506,确定在接收第一接收器信号和由声学发射器12发射声学脉冲501之间的第一传播时间,确定在接收第二接收器信号和由声学发射器12发射声学脉冲501之间的第二传播时间,以及确定在接收第三接收器信号和由声学发射器12发射声学脉冲501之间的第三传播时间。计算单元507被配置成经由任何已知方法或已知方法的组合来确定第一传播时间、第二传播时间和第三信号的传播时间。例如,计算单元507可以被配置成基于信号幅度中的变化来确定传播时间。在另一示例中,计算单元507可以被配置成基于信号相位中的变化来确定传播时间。在另一个示例中,计算单元可以被配置成基于信号被发射和接收的时间之间的差异来确定传播时间。
66.计算单元507可以被配置成接收或确定风角。例如,计算单元507可以包括如上所述的任何合适的电路来确定风角(例如,aoa)。计算单元507可以被配置成基于第一传播时间、第二传播时间和风角来确定空速(例如,真实空速(tas)、等效空速(eas)或校准空速(cas)),并输出指示空速的空速信号。
67.在某些实施例中,计算单元507可以包括可操作地连接到脉冲控制模块511和第一、第二和/或第三声学接收器的一个或多个传播测量模块509(例如,其可以类似于如上所述的延迟电路)。如所示,每个接收器可以包括专用延迟测量模块509。本文中考虑任何其他合适数量的传播测量模块509。脉冲控制模块511可以被可操作地连接到发射器12,并被配置成使发射器12在发送时间处发送声学脉冲501。一个或多个传播测量模块509可以被配置
成比较发送时间和第一时间,以确定第一传播时间,并输出指示第一传播时间的第一传播数据513。一个或多个传播测量模块509可以被配置成将发送时间与第二时间进行比较,以确定第二传播时间并输出第二传播数据515。一个或多个传播测量模块509可以被配置成将发送时间与第三时间进行比较,以确定第三传播时间并输出第三传播数据516。
68.计算单元507可以包括风角模块517,该风角模块517可操作地连接到一个或多个传播测量模块509,以接收第一传播数据513、第二传播数据515和第三传播数据516。风角模块517可以被配置成基于第一传播数据513、第二传播数据515和第三传播数据516来确定风角,并且输出风角数据519(例如,到航空器计算机和/或其他模块)。计算单元507可以包括曲线拟合模块521,该曲线拟合模块521被配置成对第一传播数据513、第二传播数据515和第三传播数据进行曲线拟合,并将曲线拟合数据523输出到风角模块517。
69.计算单元507可以包括空速模块525,空速模块525可操作地连接到风角模块517以从其接收风角数据519。空速模块525可以被可操作地连接到一个或多个传播测量模块509,以接收第一传播数据513、第二传播数据515和第三传播数据516。空速模块525可以被配置成基于风角数据519、第一传播数据513、第二传播数据515和第三传播数据516来确定空速,并且输出空速信号527(例如,到航空器计算机和/或其他模块)。
70.计算单元507可以包括声速模块529,声速模块529可操作地连接到空速模块525以接收空速信号527。声速模块529可以被可操作地连接到一个或多个传播测量模块509,以接收第一传播数据513、第二传播数据515和第三传播数据516。声速模块529可以被可操作地连接到一个或多个传播测量模块509,以接收第一传播数据513、第二传播数据515和第三传播数据516。声速模块529可以被可操作地连接到风角模块517,以接收风角数据519。声速模块517可以被配置成基于空速信号527、第一传播数据513、第二传播数据515和第三传播数据516来确定声速,并且输出声速数据531(例如,到航空器计算机和/或其他模块)。
71.声速模块529可以被配置成根据声速来确定马赫数,并输出马赫数信号533(例如,到航空器计算机和/或其他模块)。计算单元507可以包括静态空气温度模块535,静态空气温度模块535可操作地连接到声速模块529,以接收声速数据531,以基于声速数据531确定静态空气温度,并输出静态空气温度信号537(例如,到航空器计算机和/或其他模块)。
72.在某些实施例中,计算单元507可以包括在计算单元507的一个或多个传播测量模块509和至少一个其他模块之间的多路复用器539(例如,图10中的“mux”)。多路复用器539可以被配置成从一个或多个传播测量模块接收第一传播数据513和第二传播数据515,并且对该数据进行多路复用(例如,以用于输出到消耗模块,例如,风角模块、空速模块和声速模块)。
73.在某些实施例中,计算单元被配置成构建用于计算真实空速的传播函数。传播函数可以经由输入几种类型的数据来构建。例如,传播函数可以包括与声学发射器相对于第一声学接收器、第二声学接收器和/或第三声学接收器的位置相关的数据。在另一个示例中,传播函数可以进一步包括与第一接收器信号/脉冲、第二接收器信号/脉冲或第三接收器信号/脉冲的幅度相对于测试信号/脉冲的幅度相关的数据。在另一个示例中,传播函数可以进一步包括与第一接收器信号/脉冲、第二接收器信号/脉冲或第三接收器信号/脉冲相对于测试信号/脉冲的相移相关的数据。传播函数还可以包括与风角(例如迎角)和/或声速相关的数据。
74.在某些实施例中,计算单元507可以在生成传播函数时使用波束成形算法。波束成形是已经被广泛应用于雷达和声学领域中的数据处理技术。传统上,波束成形算法使用假设的传播函数和已知的接收器位置来确定未知源(例如,发射器)的位置。这些相同的波束成形算法也可以被重新布置,使得如果接收器位置和发射器位置两者都是已知的并且接收器信号/脉冲已经被表征(例如,通过确定接收器信号/脉冲的相位和/或幅度,以及迎角和声速),则可以确定传播函数。
75.波束成形算法特别适合于考虑边界层对与航空器的表面齐平或接近齐平的风速计中空速测量的影响。边界层是靠近于飞行中的航空器表面或蒙皮的空气层,其从零速度变化到自由流速度,如图11中所示。边界层内的空速的该梯度使得使用传统计算方法通过齐平或接近齐平的仪器准确确定真实空速是困难的,从而需要使用其他计算方法,诸如使用波束成形算法。
76.在生成传播函数时使用的波束成形算法可以包括任何已知的波束成形算法,包括但不限于经典波束成形算法、capon算法、music算法、root-music算法、bartlett算法、espirit算法、min-norm算法、burg算法、samv算法、welch算法、时间反转music算法、mvdr算法、akaike信息准则算法和最小描述长度(mdl)准则算法。波束成形算法还可以包括新描述的波束成形算法。
77.通常,用于确定传播函数的波束成形算法可以包括方程,其中每个麦克风处的信号是离散源的数量乘以每个源之间的传播函数(例如格林函数)的卷积积分的函数:。这里,t是传播时间,xs描述每个发射器的矢量坐标,μn(t)是在xn处的每个接收器的传播响应(例如,xn定义为每个接收器的矢量坐标),cn(xn)是接收器(n)和在xs处的发射器之间的传播函数(例如,格林函数)。对于没有流动的线性传播,传播函数可以被定义为:(方程1)其中,σ(xn,xs)是xn处的接收器和xs处的发射器之间的传播时间(例如,通常是声速和发射器/接收器之间距离的函数),d(xn,xs)是xn处的接收器和xs处的发射器之间的幅度因子(例如,通常是源方向性和发射器/接收器之间的距离的函数),并且
휔
是风角(例如,迎角)。
78.在某些实施例中,使用用于确定传播函数和/或真实风速的基于波束成形的方程假设只有单个发射器与多个接收器一起使用,并且声学脉冲的时序是已知的。基于波束成形的方程还假设经由测量已知没有气流的传播函数,并且在飞行时的传播函数是空速、风角(例如迎角)和边界层的外部的局部声速的函数。还有信噪比足够(诸如可以测量传播时间和幅度两者)的假设。
79.在某些实施例中,声学空速传感器系统500包括相位/幅度模块,相位/幅度模块通信地耦合到和/或包括在计算单元507内,计算单元507被配置成确定声波的相位和/或确定声学脉冲和在第一声学接收器、第二声学接收器或第三声学接收器处接收的测试脉冲(例如,在无风条件下测量的脉冲)之间的相位中的差异。相移模块包括示波器,该示波器被配置成在第一声学接收器、第二声学接收器和/或第三声学接收器处测量声学脉冲的相位。相移模块和/或计算单元507内的电路可以被配置成计算在接收到的测试脉冲的相位和来自
第一声学接收器、第二声学接收器和第三声学接收器的接收到的声学脉冲之间的差异。一旦已经确定了相移,就可以计算测试脉冲和声学脉冲之间的传播时间中的差异(δt)。用于确定风速的相移的示波器方法执行达几十年,并且在r.m. schotland的手稿“the measurement of wind velocity by sonic means”(第12卷,第386-390页,其被整体地并入)中广泛描述。相位/幅度模块还可以被配置成经由示波器测量接收到的声学脉冲的幅度,并确定接收到的声学脉冲和测试脉冲的幅度之间的差异。然后,计算的脉冲之间的幅度中的差异可以被用于风速或其他特性的确定中。
80.如上所述,在某些实施例中,接收器14a-14k的第一径向距离、第二径向距离和第三径向距离中的至少两个可以相同。然而,考虑的是,变化的径向距离可以被用于确定某些空气数据参数(例如,空速)。例如,第一接收器(例如,14a)、第二接收器(例如,14b)和/或任何其他附加接收器(例如,14c-14k)可以以圆形图案围绕发射器12布置。
81.在某些实施例中,图案不必是圆形的。例如,从发射器到所有接收器的径向距离不必是固定的距离。每个接收器可以被放置在不同的已知径向距离处。然后,所有测量的发射延迟可以被规格化为任意固定的参考距离。作为非限制性示例,如果第一接收器在1 cm处,并且第二接收器在4 cm处,则两者都可以被规格化为例如2 cm的固定参考距离。在该示例中,第一接收器的测量延迟将加倍(延迟=2 cm/1 cm),并且第二接收器的测量延迟将减半(延迟=2 cm/4 cm)。如果接收器都位于2 cm处,则这样的新的延迟数是实际上将已经被测量的。这是允许接收器的非圆形图案的一种方式。接收器仍然跨越多个角度。本文中考虑了允许非圆形接收器的任何其他合适的实施例。
82.在某些实施例中,接收器(例如,14a-14k)中的一个或多个可以包括微机电系统(mems)麦克风。本文中考虑了任何其他合适类型的声学接收器。
83.另外参考图12,在某些操作条件(例如,作为风角和空速的函数)下,某些接收器可能被遮蔽。相对于上述极坐标图,虚线区域示出了其中某些位置的接收器将由于风角和空速而被遮蔽。在选择接收器的数量及其位置时,考虑其中可以在传感器中仅使用在所有操作条件下没有被遮蔽的接收器而不是整圈的接收器(例如,如图7的实施例中所示)的实施例。
84.在某些实施例中,计算单元507可以被配置成例如通过设置针对响应的最大时间来确定声学接收器是否被遮蔽。计算单元507可以忽略来自遮蔽的声学接收器的任何信号,使得在确定空气数据参数(例如,风角和空速)时不考虑虚假数据或噪声。
85.另外参考图13,示出了一个或多个传感器的放置的实施例。如所示,在某些实施例中,一个或多个传感器可以被放置在航空器的一侧上(例如,安装皮托管静压管的地方,因此气流保持附着在机身和/或上方气流将不被阻挡的地方)。如所示,可以利用多个传感器位置来确定迎角和滑移角两者。
86.在本文中公开的系统的实施例中,发射器在用于确定例如空速的所有接收器的上游。对于传统声学传感器情况不是这样,并且允许在大约0.2马赫以上的空速下操作。
87.计算机实现的方法可以包括:使用至少一个声学发射器发射声学脉冲;在第一时间处,使用位于距至少一个声学发射器径向距离处的第一声学接收器接收声学脉冲;响应于接收到声学脉冲,从第一声学接收器提供第一接收器信号,在第二时间处,使用位于距至少一个声学发射器径向距离处的第二声学接收器接收声学脉冲,以及响应于接收到声学脉
冲,从第二声学接收器提供第二接收器信号。该计算机实现的方法可以进一步包括:在第三时间处,使用位于距至少一个声学发射器径向距离处的第三声学接收器接收声学脉冲,并且响应于接收到声学脉冲,从第三声学接收器提供第三接收器信号。
88.该方法可以包括确定第一声学接收器和声学发射器之间的第一传播时间,确定第二声学接收器和声学发射器之间的第二传播时间,确定第三声学接收器和声学发射器之间的第三传播时间。
89.该方法可以包括基于以下各项中的至少一个来构建传播函数:至少一个声学发射器相对于第一接收器、第二接收器或第三接收器中的至少一个的位置;第一接收器信号、第二接收器信号或第三接收器信号中的至少一个的幅度;或者第一接收器信号、第二接收器信号或第三接收器信号中的至少一个的相位。
90.该方法可以包括基于第一传播时间、第二传播时间、第三传播时间和风角确定空速,并将空速信号输出到航空器系统。
91.该方法可以包括接收风角,或者基于第一传播时间、第二传播时间或第三传播时间来确定风角。该方法可以包括基于翼角、空速、第一传播时间、第二传播时间或第三传播时间来确定声速。
92.该方法可以包括基于声速确定马赫数,并将该马赫数输出到航空器系统。该方法可以包括基于声速确定静态空气温度,并将静态空气温度输出到航空器系统。
93.公开了一种超声声学系统,其直接测量航空器空速和相对风角(例如迎角或侧滑角)。该设计没有皮托管探头或移动机械部件,诸如对传统的基于压力的空气数据系统和风向标传感器设计而言是典型的。通过测量声学飞行时间/相位调制以及声学脉冲在跨齐平表面上的角度和距离的范围内的信号强度,该信息可以被用于构建航空器空速和风角。
94.如图1中所示,通过在发射器周围的固定半径r处放置一圈超声波接收器(麦克风),可以测量到每个接收器的声学脉冲的飞行时间。从发射器t到以角度θ放置的接收器rθ的声学脉冲的飞行时间由下式给出:(例如,v≥0,并且c0≥0),其中c0是声速,v是空速,α是相对风角,并且r是分离的半径。这是延迟方程,其定义了这些空气数据参数与发射器和多个接收器之间的实际声学脉冲到达时间延迟之间的基本关系。在某些实施例中,如图1中所示,接收器rθ的几何形状可以是从发射器t以半径r以固定角度θ的圆形图案。找到一个或多个空气数据参数的实施例可以包括增量方法,首先接收或确定风角(例如,迎角),然后使用风角来确定真实空速(例如,真实空速),然后可选地使用风角和真实空速来确定声速,并且然后可选地使用声速来确定静态空气温度。
95.上面公开了用于确定风角的实施例。下面描述用于确定风角的过程的附加实施例。
96.即使真实迎角或其他风角不与任何接收器对准,我们也可以插值来估计该角度。由于延迟方程在迎角下是最小的(即),并且其关于α是对称的(即:),这表明拟合接收器延迟用抛物线包围最小值。由于每个接收器延迟测量将被测量噪声破坏,并且最小值可能出现在两个接收器之间,因此最好将函数曲线拟合到接收器延迟,并从拟合的函数提取最小值。将这拟合到二阶方程:,其在θ=
−
(b/2a)处具有最小值。
97.将最小测量延迟及其接收器角度表示为点,然后将其任一角边上的点表示为和。这产生迎角估计公式:。
98.下面描述用于确定真实空速tas的过程的实施例。对于任何两个不同的接收器延迟和,它们的倒数差为:,并且求解真实空速估计:。
99.下面描述用于确定声速sos的过程的实施例。对于任何两个不同的接收器延迟和,它们的倒数和为,并且求解声速估计:。
100.出于数字原因,理想地,人们将在接收器圆的相对侧上选择一对接收器,两者都与迎角成直角。由于并非所有接收器都将由于遮蔽效应而产生延迟测量,因此次佳是选择相距尽可能接近于180度并且远离α尽可能接近于90度的对。如由本领域普通技术人员所理解的,马赫数可以使用真实空速和声速来确定。
101.使用以节为单位的声速的用于确定静态空气温度(sat)的过程的实施例,然后以摄氏度为单位的静态空气温度被估计为:,其中或等效于以米/秒每摄氏度为单位的声速:,其中。
102.发射器和任何接收器之间的信号损失由几何散射、分子吸收和湍流散射驱动。前两种影响是全向的,因此同样地影响所有接收器。几何散射由声能从其源传播时向外扩散引起。分子吸收在声波通过空气传播时由声能被转换为热量而引起。
103.湍流散射是定向的,其由风速和温度中的局部梯度引起,当声波通过空气传播时,湍流散射引起声波的相位和幅度中的波动。由于发射器和接收器是齐平安装的,因此速度边界层效应将使向上游传播远离安装表面的声波和向下游传播进入到安装表面中的声波弯曲。该弯曲导致下游接收器中的信号强度中的增加以及上游接收器中的信号强度的损失或遮蔽。与气流成直角传播的声音不被弯曲。只有在低空速下,所有的接收器才将有足够的信号强度来将声学脉冲与背景噪声分离。在较高的空速下,由于通过空气的信号损失,上游接收器将被“遮蔽”。如图12中所示,在较高的空速下,该遮蔽效应变得更加显著。速度越快,远离速度矢量的接收器将接收到越少信号,并且因此被有效地遮蔽。弧的遮蔽部分可以称为“楔角(wedge angle)”,并且可能不需要总是被遮蔽的传感器。(例如,对于商用航空器中的正常操作,在楔角的大约90度之外)。
104.同样,如果底座比周围空气更暖和,则温度梯度效应将遮蔽接收器,并且如果底座比周围空气更凉,则温度梯度效应将加强信号。热梯度遮蔽是瞬态效应,因为底座温度将由于大量的气流而冷却。由于该遮蔽效应,所有空速信息都需要从延迟数据提取,所述延迟数据是从无遮蔽接收器收集的。
105.使用相互间隔180的接收器对,这与进行典型的声学风测量的方式直接矛盾。如上所述,延迟测量逻辑可以包括阈值时间,在该阈值时间处,假设接收器永远不会接收到信号,然后确定接收器被“遮蔽”并输入空条目。
106.如本文中所述,来自脉冲控制模块511的脉冲控制时序逻辑的脉冲命令可以被发射器12转换成声学脉冲。脉冲控制模块511可以创建被设计为对环境噪声鲁棒的成形波形,使得传播测量模块509可以在存在噪声破坏的情况下提取脉冲时序信息。脉冲控制模块509还可以给脉冲发射时间加时间戳,使得脉冲到达时间可以由模块509确定。传播测量模块509可以提取发射器脉冲命令和接收波形之间的延迟,并将它们之间的时间延迟输出为。为了清楚起见,图5示出了发射和接收信号的相对时序。出于说明的目的,所描绘的脉冲形状是正弦波列,但也可以是简单的高斯脉冲或更复杂的图案,这取决于从背景噪声提取接收到的脉冲的难度。
107.如上所述,每个延迟测量模块可以包括模数转换器,该模数转换器以足够的速率采样,以便以足够的分辨率确定延迟时间,以用于准确的空速测量(例如,以几分之一微秒为单位)。多路复用器539可以将测量的延迟时间/数据收集到可索引列表中。遮蔽接收器延迟可以作为空条目被包括在列表中,使得后续框可以动态地适配非遮蔽条目的变化长度和分布。
108.曲线拟合模块521可以接受如所示的一组延迟差异,所述延迟差异是沿着曲线中的一条的点。曲线拟合模块521可以确定对非空列表条目的最佳最小二乘拟合,并且得到的输出参数可以定义表示为的曲线方程。
109.风角模块517可以使用曲线拟合函数,并求解角度α,其中函数被最小化,如上所述。该最小化角度可以作为风角α输出。空速模块525使用来自风角模块517的风角估计和测量的延迟列表来计算真实空速v,如上所述。
110.声速模块529可以使用估计的风角和真实空速来计算估计声速c0,如上所述。估计的真实空速除以c0以计算马赫数m。静态空气温度模块535可以计算静态温度(ts),如上所述。
111.使用在相对于航空器气流的多个角度处捕获声学脉冲飞行时间的超声波迎角传感器设计,提供以下益处:单个单元能够测量真实空速和风角(例如迎角或侧滑角),直接测量声速以计算气流(current)、马赫数和静态空气温度、跨传感器的无阻碍气流,消除气流扰动和阻力,没有机械移动部件,这导致更高的带宽和风角的更新速率,更低的除冰要求,因为没有传感器组件直接面对气流,以及在接收器不能提取脉冲信号(由于多种原因,包括结冰)时,与皮托管静压端口结冰到固定的合理但错误的压力相比的真阳性故障检测。
112.如本领域技术人员将理解的,本公开的各方面可以实现为系统、方法或计算机程序产品。因此,本公开的各方面可以采取完全硬件实施例、完全软件实施例(包括固件、驻留软件、微代码等)或者结合软件和硬件方面的实施例的形式,其所有可能性在本文中都可以称为“电路”、“模块”或“系统”。“电路”、“模块”或“系统”可以包括一个或多个分离的物理硬件和/或软件组件的一个或多个部分,其可以一起执行所公开的“电路”、“模块”或“系统”的功能,或者“电路”、“模块”或“系统”可以是单个独立的(self-contained)单元(例如,硬件和/或软件)。此外,本公开的各方面可以采取在一个或多个计算机可读介质中实现的计算
机程序产品的形式,该计算机可读介质上实现有计算机可读程序代码。
113.可以利用一个或多个计算机可读介质的任何组合。计算机可读介质可以是计算机可读信号介质或计算机可读存储介质。计算机可读存储介质可以是,例如但不限于,电子、磁性、光学、电磁、红外或半导体系统、装置或设备,或前述的任何合适的组合。计算机可读存储介质的更具体的示例(非穷举列表)将包括以下各项:具有一条或多条线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或闪存)、光纤、便携式光盘只读存储器(cd-rom)、光学存储设备、磁性存储设备或前述的任何合适的组合。在本文档的上下文中,计算机可读存储介质可以是可以包含或存储用于由指令执行系统、装置或设备使用或结合指令执行系统、装置或设备使用的程序的任何有形介质。
114.计算机可读信号介质可以包括例如在基带中或者作为载波的部分的具有被实现在其中的计算机可读程序代码的传播数据信号。这样的传播信号可以采取多种形式中的任何形式,包括但不限于电磁、光学或其任何合适的组合。计算机可读信号介质可以是任何计算机可读介质,该计算机可读介质不是计算机可读存储介质,并且可以传送、传播或传输用于由指令执行系统、装置或设备使用或结合指令执行系统、装置或设备使用的程序。
115.在计算机可读介质上实现的程序代码可以使用任何适当的介质来传输,所述适当的介质包括但不限于无线、有线、光纤线缆、rf等、或前述的任何合适的组合。
116.用于执行针对本公开的各方面的操作的计算机程序代码可以以一种或多种编程语言的任何组合来编写,所述编程语言包括面向对象的编程语言,诸如java、smalltalk、c++或诸如此类,以及传统的过程编程语言,诸如“c”编程语言或类似的编程语言。程序代码可以完全在用户的计算机上执行,作为独立的软件包部分地在用户的计算机上执行,部分地在用户的计算机上执行并且部分地在远程计算机上执行,或者完全在远程计算机或服务器上执行。在后者的情况下,远程计算机可以通过任何类型的网络连接到用户的计算机,包括局域网(lan)或广域网(wan),或者可以与外部计算机进行连接(例如,使用互联网服务提供商通过互联网)。
117.以上可以参考根据本公开的实施例的方法、装置(系统)和计算机程序产品的流程图图示和/或框图来描述本公开的各方面。将理解,任何流程图图示和/或框图中的每个框以及任何流程图图示和/或框图中的框的组合可以由计算机程序指令来实现。这些计算机程序指令可以被提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器,以产生机器,使得经由计算机或其他可编程数据处理装置的处理器执行的指令创建用于实现在任何流程图和/或一个或多个框图框中指定的功能/动作的装置。
118.这些计算机程序指令也可以被存储在计算机可读介质中,其可以指导计算机、其他可编程数据处理装置或其他设备以特定方式运转,使得存储在计算机可读介质中的指令产生包括实现流程图和/或一个或多个框图框中指定的功能/动作的指令的制品。
119.计算机程序指令也可以被加载到计算机、其他可编程数据处理装置或其他设备,以使得在计算机、其他可编程装置或其他设备上执行一系列操作步骤,以产生计算机实现的过程,使得在计算机或其他可编程装置上执行的指令提供用于实现本文中指定的功能/动作的过程。
120.要理解,本文中公开的方法的实施例可以包括本文中描述的步骤中的一个或多
个。此外,这样的步骤可以以任何期望的次序执行,并且步骤中的两个或更多个可以彼此同时执行。本文中公开的两个或更多个步骤可以在单个步骤中组合,并且在一些实施例中,步骤中的一个或多个可以作为两个或更多个子步骤来执行。此外,除了本文中公开的步骤中的一个或多个之外,或者作为其替代,可以执行其他步骤或子步骤。
121.本领域普通技术人员理解,本文中公开的任何数值都可以是精确的值或者可以是一定范围内的值。此外,本公开中使用的任何近似的术语(例如,“大约”、“近似”、“约”)可以指在一定范围内的所述值。例如,在某些实施例中,该范围可以在(正或负)20%之内,或在10%之内,或在5%之内,或在2%之内,或在如由本领域普通技术人员所理解的任何其他合适的百分比或数量之内(例如,对于已知的容限极限或误差范围)。
122.尽管已经参考附图中图示的实施例描述了发明构思,但是在不脱离权利要求的范围的情况下,可以采用等同物以及在本文中进行替代。在本文中图示和描述的组件仅仅是系统/设备和组件的示例,其可以被用于实现本发明构思的实施例,并且可以在不脱离权利要求的范围的情况下以其他设备和组件替换。此外,除非在权利要求中另外指定,否则本文中提供的任何尺寸、度数和/或数值范围要被理解为非限制性示例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1