一种实现MLS扫描波束的新方法与流程
一种实现mls扫描波束的新方法
技术领域
1.本发明属于航空技术领域,涉及一种实现mls扫描波束的新方法。
背景技术:
2.微波着陆系统(mls)是一种具备先进技术体制、适合全天候、精确的航空无线电导航 系统。mls系统的功能实现主体由方位制导台和仰角制导台构成,为飞机提供进场着陆的方 位信息和仰角信息,统称为角度制导信息。飞机的角度制导信息是在机载接收机接收到地面 角度制导天线(包括方位天线和仰角天线)发射的两次mls扫描波束后,通过测定这两个波 束之间的时间差得到的。目前,mls扫描波束多采用sa函数、泰勒函数、高斯函数或准高 斯函数作为基带信号,这些函数所产生的基带信号不满足国际民航公约对mls扫描波束-3db 点宽度的要求,即扫描波束幅度在-3db时的波束宽度为整个扫描波束宽度的一半。在工程 实际中还需要设计滤波硬件电路,对mls扫描波束的射频信号进行平滑滤波,来改变-3db 点宽度使其达到要求。
技术实现要素:
3.本发明的目的在于克服现有技术中存在的缺陷,提出了一种实现mls扫描波束的新方 法,该方法提出了一种实现mls扫描波束的新算法,该算法使得扫描波束在基带信号阶段 就可满足国际民航公约的要求,相比传统的扫描波束形成方法,省去了mls扫描波束射频 信号的硬件调试环节,不仅节省了设计资源,而且在工程中更容易实现。
4.其技术方案如下:
5.一种实现mls扫描波束的新方法,包括以下步骤:
6.(1)建立扫描波束的数学模型:
[0007][0008]
其中,u(x)表示扫描波束的数学模型,x表示扫描波束的数学模型弧度,x取值范围为 [-π,π],e
(.)
表示以自然常数e为底的指数操作,k和b0均为常数,取特定值时可使得扫描波束 的-3db点为扫描波束宽度的一半。
[0009]
(2)构建扫描波束自变量值;
[0010]
由于扫描波束数学模型中自变量为弧度值,设为函数周期为[-π,π]。设扫描波束时 间周期为t,0时刻对应-π,t时刻对应π。设一个波束宽度为δt,那么,一个波束宽度弧 度值为
[0011][0012]
因此,起始时刻为0的扫描波束的自变量值x0应为
[0013]
[0014]
其中
[0015]
任意时刻的扫描波束自编量值xn为
[0016][0017]
整理后得
[0018][0019]
其中t为出现扫描波束的起始时刻。
[0020]
(3)获取扫描波束值
[0021]
将任意时刻的扫描波束自变量值xn带入扫描波束的数学模型中,可得在任意时刻的扫描 波束值,如下式。
[0022][0023]
调整上式中的k和b0值,当k=1.12,b0=1/3,满足国际民航公约对mls扫描波束-3db 点宽度的要求。
[0024]
(4)获取各类微波着陆信号中的特定参数值;
[0025]
1)方位信号
[0026]
a.前导码时隙分配为0到1.600毫秒,主要包括基准时间码与功能识别码。
[0027]
b.扇区信号的时隙分配为1.600毫秒至2.432毫秒。扇区信号需要产生三个oci脉冲, 分别为左外oci、右外oci和后方oci脉冲,每个oci脉冲占128微秒时隙;同时产生1 位dpsk地面识别码和6位dpsk调制的机载天线选择脉冲。
[0028]
c.扫描信号时隙分配为2.432至15.900毫秒。扫描信号需产生幅度调制的往、返测试 脉冲,在两个测试脉冲之间,应用步骤(3)所获取的扫描波束值,在2.560毫秒至8.760毫 秒时隙内产生“往”扫描波束,在9.360毫秒至15.560毫秒时隙内产生“返”扫描波束。
[0029]
2)俯仰信号
[0030]
a.同方位信号一致,前导码时隙分配为0到1.600毫秒,主要包括基准时间码与功能 识别码。
[0031]
b.扇区信号时隙分配为1.728毫秒至1.856毫秒。扇区信号中,只产生一种oci信号, oci脉冲占128微秒时隙。
[0032]
c扫描信号时隙分配为1.856毫秒至5.600毫秒。应用步骤(3)所获取的扫描波束值, 在1.856毫秒至3.406毫秒时隙内产生“往”扫描波束,在3.806毫秒至5.356毫秒时隙内产 生“返”扫描波束。
[0033]
3)高速方位信号
[0034]
a.高速方位信号与方位信号类似,前导码时隙分配为前1.600毫秒,主要包括基准时间 码与功能识别码。
[0035]
b.扇区信号时隙分配为1.600毫秒至2.432毫秒,与方位信号分配一致。
[0036]
c.应用步骤(3)获取的扫描波束值,扫描信号时隙分配为2.432毫秒至11.900毫秒, 在2.560毫秒至6.760毫秒时隙内产生“往”扫描波束,在7.360毫秒至11.560毫秒时隙内 产生“返”扫描波束。
[0037]
4)拉平信号
[0038]
a.与方位信号类似,前导码时隙分配为前1.600毫秒,主要包括基准时间码与功能识 别码。
[0039]
b不产生扇区信号,扫描信号时隙分配为1.600毫秒至5.300毫秒。产生的扫描信号只 包括“往”扫描信号和“返”扫描信号,应用步骤(3)所获取的扫描波束值,在1.856毫秒至 3.056毫秒时隙内产生“往”扫描波束,在3.856毫秒至5.056毫秒时隙内产生“返”扫描波 束。
[0040]
5)反方位信号
[0041]
a.与方位信号类似,前导码时隙分配为前1.600毫秒,主要包括基准时间码与功能识 别码。
[0042]
b.扇区信号时隙分配为1.600毫秒至2.432毫秒。
[0043]
c.应用步骤(3)所获取的扫描波束值,在2.560毫秒至6.760毫秒时隙内产生“往
”ꢀ
扫描波束,在7.360毫秒至11.560毫秒时隙内产生“返”扫描波束。
[0044]
6)基本数据字
[0045]
a.基本数据字前导码时隙分配为前1.600毫秒。产生7位dpsk调制的功能识别码。
[0046]
b.不同于方位信号,基本数据字信号只包含20位dpsk调制的基本数据信号,时隙分 配为1.600毫秒至3.100毫秒,前18位为信息位,后2位为奇偶校验位。
[0047]
7)辅助数据字信号
[0048]
a.辅助数据字前导码时隙分配为前1.600毫秒。包含7位dpsk调制功能识别码。
[0049]
b.辅助数据信号时隙分配为1.600毫秒至5.900毫秒。产生64位dpsk调制的辅助数 据信号。
[0050]
(5)产生各类微波着陆信号;
[0051]
按照步骤(4)的微波着陆信号的时隙分配格式,采用时分复用方法,接收机基准时间 码、功能识别码、将电台识别码、天线选择脉冲、oci后信号、oci左信号、oci右信号、
ꢀ“
往”检查脉冲、“返”检查脉冲、尾保护时间、“往”扫描信号、“返”扫描信号等指定参数,共 同合成完整功能的微波着陆方位信号、俯仰信号、高速方位信号、拉平信号、反方位信号, 以及基本数据字信号和辅助数据字信号。
[0052]
(6)选择所需微波着陆信号
[0053]
根据各微波着陆信号的功能识别码,选择所需的微波着陆信号。
[0054]
(7)产生微波着陆序列;
[0055]
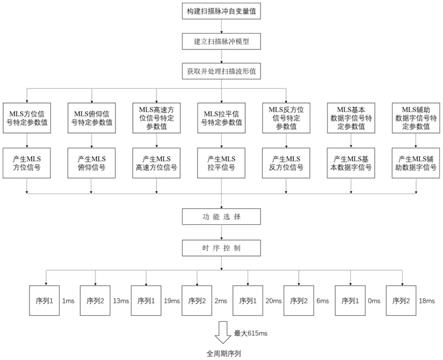
采用时分复用方法,对选择的微波着陆信号进行时序控制,生成微波着陆序列1和微波 着陆序列2。
[0056]
(8)产生全周期微波着陆信号;
[0057]
采用时分复用方法,对序列1和序列2进行时隙进行排列,序列间的时隙间隔分别为 1ms、13ms、19ms、2ms、20ms、6ms、0ms,生成微波着陆全周期数字基带信号。全周期信 号时长不大于615ms,每个全周期信号的间隔为18ms。
[0058]
进一步,还包括以下步骤:(9)gnuradio软件高速全周期功能序列数字基带信号仿真 验证。
[0059]
进一步,还包括以下步骤:(10)hackrf one硬件测试。
[0060]
与现有技术相比,本发明的有益效果为:
[0061]
本发明采用新算法来形成mls扫描波束,使得mls扫描波束在基带信号阶段即可满足 国际民航公约的要求,省去了硬件调试的步骤,使得在工程中更加容易实现,节省开发资源。
附图说明
[0062]
图1为本发明的流程图;
[0063]
图2为高速方位扫描波束;
[0064]
图3为示波器输出mls高速全周期信号截取。
具体实施方式
[0065]
下面结合附图和具体实施例对本发明的技术方案作进一步详细地说明。以生成高速全周 期微波着陆信号为例。
[0066]
(1)建立扫描波束的数学模型:
[0067][0068]
其中,u(x)表示扫描波束的数学模型,x表示扫描波束的数学模型弧度,x取值范围为 [-π,π],e
(.)
表示以自然常数e为底的指数操作,k取1.12和b0取1/3。
[0069]
(2)构建扫描波束自变量值;
[0070]
由于扫描波束数学模型中自变量为弧度值,设为函数周期为[-π,π]。设扫描波束时 间周期为t,0时刻对应-π,t时刻对应π。设一个波束宽度为δt,那么,一个波束宽度弧 度值为
[0071][0072]
因此,起始时刻为0的扫描波束的自变量值x0应为
[0073][0074]
其中
[0075]
任意时刻的扫描波束自编量值xn为
[0076][0077]
整理后得
[0078]
[0079]
其中t为出现扫描波束的起始时刻。
[0080]
(3)获取扫描波束值
[0081]
将任意时刻的扫描波束自变量值xn带入扫描波束的数学模型中,可得在任意时刻的扫描 波束值,如下式。
[0082][0083]
(4)获取各类微波着陆信号中的特定参数值;
[0084]
1)方位信号
[0085]
a.利用前1.6毫秒前导波信号的未经调制的载波作为段同步头,对前导码中的基准时 间码与功能识别码进行差分编码,产生5位dpsk调制的时间基准码和7位dpsk调制的 功能识别码,对应方位信号,其中时间基准码时隙分配为0.832毫秒至1.152毫秒,功能识 别码时隙分配为1.152毫秒至1.600毫秒。
[0086]
b.扇区信号的时隙分配为1.600毫秒至2.432毫秒。其中设备识别码占用时隙为1.600 毫秒至1.664毫秒;天线选择脉冲占用时隙为1.664毫秒至2.048毫秒;扇区信号需要产生 三个oci脉冲,分别为左外oci、右外oci和后方oci脉冲,每个oci脉冲占128微秒时 隙,其中后oci信号时隙分配为2.048毫秒至2.176毫秒,左oci信号时隙分配为2.176至 2.304毫秒,右oci信号时隙分配为2.304毫秒至2.432毫秒。
[0087]
c.扫描信号时隙分配为2.432至15.900毫秒。扫描信号需产生幅度调制的往、返测试 脉冲,脉冲宽度为128微秒,两个测试脉冲之间的时间间隔为13000
±
128微妙,其中往测 试脉冲占用时隙为2.432毫秒至2.560毫秒,返测试脉冲占用时隙为15.560毫秒至15.688毫 秒;在两个测试脉冲之间,应用步骤(3)所获取的扫描波束值,在2.560毫秒至8.760毫秒 时隙内产生“往”扫描波束,在9.360毫秒至15.560毫秒时隙内产生“返”扫描波束。
[0088]
2)俯仰信号
[0089]
a.同方位信号一致,在前1.6毫秒范围内,以前导码中的载波截获段为参考值,对前导 码中的接收机基准时间码与功能识别码进行差分编码,仰角信号的前导码格式和时隙分配与 方位信号类似,不同之处为产生的7位dpsk调制的功能识别码对应到俯仰信号;
[0090]
b.扇区信号时隙分配为1.728毫秒至1.856毫秒。扇区信号中,只产生一种oci信号, oci脉冲占128微秒时隙。
[0091]
c扫描信号时隙分配为1.856毫秒至5.600毫秒。应用步骤(3)所获取的扫描波束值, 在1.856毫秒至3.406毫秒时隙内产生“往”扫描波束,在3.806毫秒至5.356毫秒时隙内产 生“返”扫描波束。
[0092]
3)高速方位信号
[0093]
a.高速方位信号与方位信号类似,前导码时隙分配为前1.600毫秒,只有产生的7位 dpsk调制的功能识别码不同于方位信号;
[0094]
b.扇区信号的时隙分配为1.600毫秒至2.432毫秒。其中设备识别码占用时隙为1.600 毫秒至1.664毫秒;天线选择脉冲占用时隙为1.664毫秒至2.048毫秒,每个oci脉冲占128 微秒时隙,左外oci、右外oci和后方oci脉冲时隙分配和方位信号完全一致。
[0095]
c.扫描信号时隙分配为2.432至11.900毫秒。扫描信号需产生幅度调制的往、返测
同合成完整功能的微波着陆方位信号、俯仰信号、高速方位信号、拉平信号、反方位信号, 以及基本数据字信号和辅助数据字信号。
[0111]
(6)选择所需微波着陆信号
[0112]
根据各微波着陆信号的功能识别码,选择方位信号、仰角信号、反方位信号、高速方位 信号、拉平信号、基本数据字1、基本数据字2、基本数据字4,基本数据字6,辅助数据字 a1,辅助数据字a2,辅助数据字a3,辅助数据字a4。
[0113]
(7)产生微波着陆序列;
[0114]
采用时分复用方法,对选择的微波着陆信号进行时序控制。高速序列1信号包含有仰角、 高速进场方位和基本数据字信号,总时序排列为64.9毫秒。高速序列1信号时序排列格式 为:仰角信号(5.600毫秒),高速方位信号(11.900毫秒),基本数据字(3.100毫秒),基 本数据字(3.100毫秒),基本数据字(3.100毫秒),基本数据字(3.100毫秒),高速方位信 号(11.900毫秒),仰角信号(5.600毫秒),高速方位信号(11.900毫秒),仰角信号(5.600毫秒)。
[0115]
高速序列2信号由仰角、高速进场方位、反方位和基本数据字2信号组成,总时序排列 为67.5毫秒。高速序列2信号排列格式为:仰角信号(5.600毫秒),高速方位信号(11.900 毫秒),基本数据字2(3.100毫秒),反方位信号(11.900毫秒),高速方位信号(11.900毫 秒),仰角信号(5.600毫秒),高速方位信号(11.900毫秒),仰角信号(5.600毫秒)。
[0116]
(8)产生全周期微波着陆信号;
[0117]
采用时分复用方法,对序列1和序列2时隙进行排列,序列间的时隙间隔分别为1ms、 13ms、19ms、2ms、20ms、6ms、0ms,生成微波着陆全周期数字基带信号。全周期信号时 长不大于615ms,每个全周期信号的间隔为18ms。
[0118]
进一步,还包括以下步骤:(9)gnuradio软件高速全周期功能序列数字基带信号仿真 验证;
[0119]
应用gnuradio软件中c++语言的自定义模块对mls的高速全周期功能序列数字基带 信号进行仿真验证举例。按照上述步骤(1)至(8),应用gnuradio软件中的c++语言, 自定义方位信号模块、仰角信号模块、反方位信号模块、高速方位信号模块、拉平信号模块、 基本数据字1、2、3、4、5、6模块和辅助数据字a、b、c、d模块,根据功能识别码,通 过功能选择得到所需的高速方位信号模块、仰角信号模块、反位角信号模块、基本数据字1 模块、基本数据字2模块、基本数据字4模块,基本数据字6模块,辅助数据字a1模块,辅 助数据字a2模块,辅助数据字a3模块,辅助数据字a4模块,再通过时序控制使得各功能 信号以不同的时序排列,进而生成序列1和序列2。这两个序列再以间隔为1ms、13ms、19ms、 2ms、20ms、6ms、0ms不同的时隙排列,生成微波着陆的高速全周期数字基带信号,每个 全周期信号的间隔为18ms。
[0120]
(10)hackrf one硬件测试
[0121]
基于步骤(9)所述的gnuradio软件所生成的mls高速全周期功能序列数字基带信号, 选用hackrf one作为硬件实现载体,将基带信号转换为射频信号,为便于示波器观测波形, 测试中设置载波频率为410mhz,所述测试中高速方位信号扫描波束宽度设为300us,经测 量上升沿和下降沿的半功率点(-3db)之间的宽度为150us,满足国际民航公约对微波着陆 扫描波束波束宽度要求,如图2所示。高速全周期功能序列数字基带信号部分截取测
试结果 如图3所示;将hackrf one硬件载波频率设为与机载微波着陆设备一致的频率,并与之进 行方位、俯仰指示测试和台站识别音功能测试,方位、俯仰指示正确,耳机内台站识别音清 晰。
[0122]
以上所述,仅为本发明较佳的具体实施方式,本发明的保护范围不限于此,任何熟悉本 技术领域的技术人员在本发明披露的技术范围内,可显而易见地得到的技术方案的简单变化 或等效替换均落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1