一种高空大气污染物样本采集装置的制作方法
1.本发明涉及环保设备领域,更具体地,涉及一种高空大气污染物样本采集装置。
背景技术:
2.随着我国对于环境保护力度的加强,空气的质量检测也越来越严格,因此需要对空气检测中的各个环节进行精确把控,尤其是空气的采样环节,若采样区域有所偏差,将可能导致对空气质量造成误判,影响环境的针对性治理。
3.对于高空气体的采样通常采用氦气球携带采样装置升高的预定的高度范围进行采样,高度的控制一般通过牵引绳的伸出长度进行计算,但是由于气流的影响,牵引绳会发生弯曲,造成高度控制及其不准确,还可以采用检测气压的方式换算成高度,精度通常较差,而且容易受大风、空气湿度、云层等的干扰,海拔精度往往会误差几十米甚至上百米;无人机的出现虽然替代了牵引绳,但是大部分仍然采用气压换算高度的方式,误差仍然会很大,不利于空气质量的精确把握。
4.因此,需要一种新型的高空大气污染物样本采集装置,能够解决上述问题。
技术实现要素:
5.本发明的一个目的是提供一种高空气体采样的新技术方案。
6.根据本发明的第一方面,提供了一种高空大气污染物样本采集装置,包括升空采样装置以及控制装置,所述升空采样装置与所述控制装置之间信号连接,所述升空采样装置通过牵引绳控制其高度,所述牵引绳上均匀固定有若干角度检测器,所述角度检测器用于检测所述牵引绳当前位置的倾斜角度,所述角度检测器均与所述控制装置信号连接。
7.通过本方案,升空采样装置在升高到一定距离后,角度检测器能够将牵引绳该处的角度发送至控制装置,控制装置根据该角度以及角度检测器之间的固定距离,经三角函数换算后得出角度检测器之间的高度差,将该高度差经过相加后即得到升空采样装置的精确高度,从而有助于提高空气质量的检测精度。
8.优选地,所述角度检测器包括防护筒以及检测器,所述检测器位于所述防护筒中。
9.通过本方案,防护筒能够对检测器起到保护作用,避免受高空气流以及云层对检测器的影响,提高检测器的检测精度。
10.优选地,所述牵引绳包括若干根绳段,所述绳段与所述防护筒交替布置,所述绳段的端部与所述防护筒的端部同轴固定。
11.通过本方案,使角度检测器与牵引绳同轴布置,有助于减小体积,减小风阻,从而降低牵引绳所受的风力影响,有助于降低牵引绳震动和晃动,提高检测过程中的精度。
12.优选地,所述检测器包括适应筒、角度传感器以及重锤,所述适应筒同轴转动连接至所述防护筒中,所述适应筒的一侧设置有配重条,所述角度传感器固定至所述适应筒中,所述重锤连接至所述角度传感器的转轴上,所述重锤的摆动方向始终朝向或远离所述配重条。
13.通过本方案,适应筒能够在配重条的重力作用下转动,使重锤仅能够在与海平面的垂直面上进行转动,从而精确检测出与海平面的夹角,在提高精度的同时,减小对角度传感器的横向受力,起到保护角度传感器的作用。
14.优选地,所述角度传感器的转轴上固定有第一齿轮,所述重锤通过连接杆连接有第二齿轮,所述第二齿轮的圆心处转动连接至所述适应筒中,所述第二齿轮与所述第一齿轮啮合。
15.通过本方案,通过齿轮啮合的方式将重锤角度的改变传递至角度传感器上,进一步避免重锤的晃动对角度传感器转轴的影响,过滤掉其他方向位移仅保留垂直方向的夹角信息,提高检测精度的同时,进一步保护了角度传感器。
16.优选地,所述升空采样装置包括高空气球以及采样瓶,所述采样瓶水平布置并固定至所述高空气球底部,所述采样瓶包括两端均开口的瓶身以及封堵至所述瓶身两端的封堵盖,所述封堵盖连接至采样控制机构上。
17.通过本方案,当升空采样装置到达准确高度后,采样控制机构控制封堵盖打开,有助于释放掉瓶身中残留的原有空气,并充满该高度下的空气,进一步提高采样精度。
18.优选地,所述采样瓶为梭形结构,所述采样瓶底部水平转动连接有固定块,所述牵引绳固定至所述固定块上。
19.通过本方案,使采样瓶在高空气流中,能够始终保持瓶身的开口与风向一致,从而保证吹走瓶内残留的原有空气,所采集样本完全为该高度下的空气。
20.优选地,所述采样控制机构包括传动轴、驱动电机以及采样控制板,所述传动轴沿所述瓶身的轴向转动连接至所述瓶身上,所述传动轴的两端分别固定至两个所述封堵盖的偏心处;所述驱动电机通过蜗杆与所述传动轴上的涡轮啮合;所述驱动电机电连接至所述采样控制板,所述采样控制板与所述控制装置连接。
21.通过本方案,涡轮蜗杆的配合带动传动轴转动,从而带动封堵盖旋转打开瓶身两端的开口进行采样,采样完毕后反向转动使封堵盖重新密封开口。
22.优选地,所述控制装置包括电源模块、处理器、显示器以及输入模块,所述电源模块、所述显示器、所述输入模块、所述升空采样装置以及所述角度检测器均连接至所述处理器。
23.优选地,所述牵引绳包括支撑层以及穿线管,所述支撑层包裹至所述穿线管外部,所述升空采样装置与所述控制装置之间的导线以及所述角度检测器与所述控制装置之间的导线均通过所述穿线管排布。
24.通过本方案,导线连接能够提高采样精度和可靠性,支撑层在起到主要的受力部分的同时,还能够对穿线管起到保护的作用。
25.根据本公开的一个实施例,使用本高空大气污染物样本采集装置进行高空气体的样本采集,能够精确计算采样高度,并且能够精确采集一定高度处的大气污染物样本,有助于提高高空气体的质量检测精度。
26.通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
27.被结合在说明书中并构成说明书的一部分的附图示出了本发明的实施例,并且连同其说明一起用于解释本发明的原理。
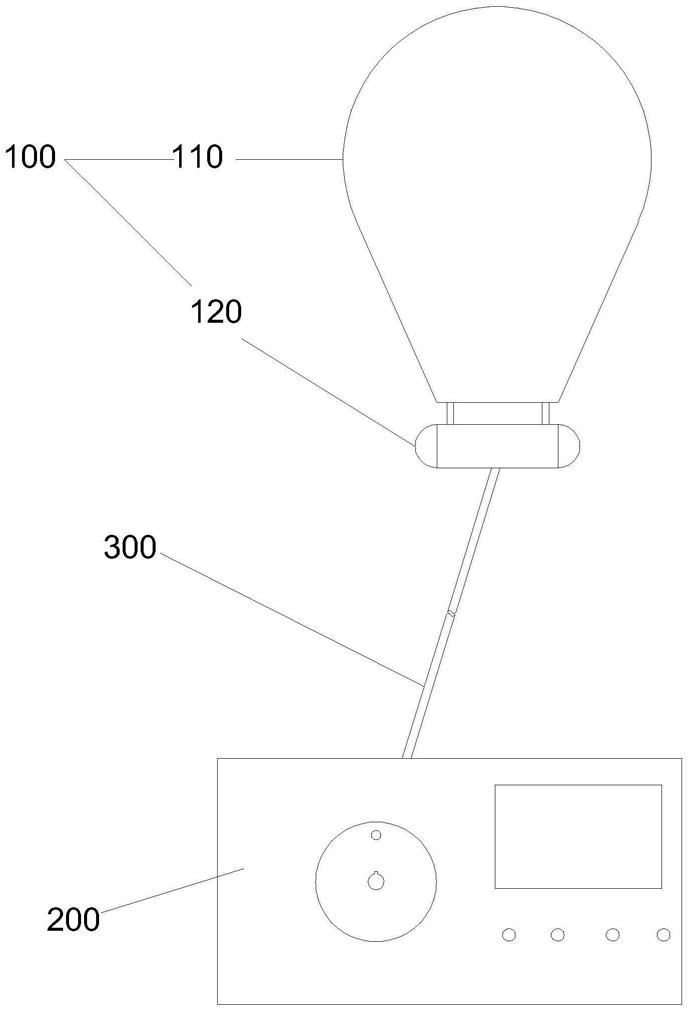
28.图1是本发明实施例的高空大气污染物样本采集装置的结构示意图。
29.图2是图1中牵引绳的结构示意图。
30.图3是图2中角度检测器的截面结构示意图。
31.图4是图3中适应筒的结构示意图。
32.图5是另一实施例中角度传感器与重锤之间连接结构示意图。
33.图6是图1中采样瓶的结构示意图。
34.图7是图6中采样瓶的截面结构示意图。
35.图8是图1中高空大气污染物样本采集装置的电路结构框图。
36.图9是图2中牵引绳的截面结构示意图。
具体实施方式
37.现在将参照附图来详细描述本发明的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。
38.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
39.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
40.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
41.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
42.实施例
43.如图1至图9所示,本实施例中的高空大气污染物样本采集装置,包括升空采样装置100以及控制装置200,所述升空采样装置100与所述控制装置200之间信号连接,所述升空采样装置100通过牵引绳300控制其高度,所述牵引绳300上均匀固定有若干角度检测器400,所述角度检测器400用于检测所述牵引绳300当前位置的倾斜角度,所述角度检测器400均与所述控制装置200信号连接。
44.其中升空采样装置包括高空气球100或者无人机等升空装置,在该实施例中为高空气球100,内容有氦气或氢气等,能够在大气层内升高至一定高度。在高空气球100底部固定有采样瓶120,采样瓶120能够在控制装置200的控制作用下打开与关闭,以采集高空气体。
45.通过本实施例该方案,升空采样装置100在升高到一定距离后,由于牵引绳300的自身重量以及高空风力的因素,牵引绳300会成倒置的抛物线形状,而角度检测器400能够将牵引绳300各个节点处的角度发送至控制装置200,将牵引绳300划分为若干个倾斜的线段,控制装置200根据该角度以及角度检测器400之间的固定距离,经三角函数换算后得出
角度检测器400之间的高度差,将该高度差经过相加后即得到升空采样装置100的精确高度,再进行高空大气污染物的采集,有助于提高空气质量的检测精度。
46.该实施例中的牵引绳300缠绕至收卷辊上,该收卷辊由手动或电动进行驱动,对牵引绳300进行收卷或释放;在角度检测器400上绘制有编号,以方便根据编号大致估算出当前的高度,并根据编号得知角度检测器400升空的个数,以方便进行精确计算;在牵引绳上标注有刻度,可以通过读取牵引绳上的刻度来辅助计算最底部牵引绳伸出的长度。
47.在本实施例或其他实施例中,所述角度检测器400包括防护筒410以及检测器,所述检测器位于所述防护筒410中,防护筒410能够对检测器起到保护作用,避免受高空气流以及云层的影响,提高检测器的检测精度。该防护筒410例如是聚乙烯材质的塑料筒,具有一定韧性,且质量较轻。在防护筒410的上下两端开设有通孔,供线路穿过,以保证检测器与控制装置200的电连接。
48.在本实施例或其他实施例中,所述牵引绳300包括若干根绳段310,所述绳段310与所述防护筒410交替布置,所述绳段310的端部与所述防护筒410的端部同轴固定,使角度检测器400与牵引绳300同轴布置,有助于减小体积,减小风阻,从而降低牵引绳300所受的风力影响,有助于降低牵引绳300震动和晃动,提高检测过程中的精度。该实施例中的防护筒410端部利用抱箍等装置与绳段310的端部固定,方便拆卸与安装。
49.在本实施例或其他实施例中,所述检测器包括圆柱状的适应筒420、角度传感器430以及重锤440,所述适应筒420同轴转动连接至所述防护筒410中,所述适应筒420的一侧设置有配重条421,所述角度传感器430固定至所述适应筒420中,所述重锤440连接至所述角度传感器430的转轴上,所述重锤440的摆动方向始终朝向或远离所述配重条421。
50.该配重条421为金属条或金属块,镶嵌至适应筒420的侧壁上,而适应筒420通过轴承与防护筒410同轴连接,使适应筒420能够在配重条421的重力作用下转动,当牵引绳300倾斜时,适应筒420能够随之发生转动,配重条421始终朝向下方,使重锤440仅能够在与海平面的垂直面上进行转动,从而精确检测出与海平面的夹角,在提高精度的同时,减小对角度传感器430的横向受力,起到保护角度传感器430的作用。
51.该角度传感器430例如是电位器或者编码器,能够将其转轴的转动角度转换为电信号,通过电压检测或者解码,计算得出转动角度,其转动的角度及为当前牵引绳300的倾斜角度。
52.如图5所示,在另一个实施例中,所述角度传感器430的转轴上固定有第一齿轮431,所述重锤440通过连接杆441连接有第二齿轮432,所述第二齿轮432的圆心处转动连接至所述适应筒420中,所述第二齿轮432与所述第一齿轮431啮合。通过齿轮啮合的方式将重锤440角度的改变传递至角度传感器430上,进一步避免重锤440的晃动对角度传感器430转轴的影响,过滤掉其他方向位移仅保留垂直方向的夹角信息,提高检测精度的同时,进一步保护了角度传感器。
53.在本实施例或其他实施例中,所述升空采样装置100包括高空气球110以及采样瓶120,所述采样瓶120水平布置并固定至所述高空气球110底部,所述采样瓶120包括两端均开口的瓶身121以及封堵至所述瓶身121两端的封堵盖122,所述封堵盖122连接至采样控制机构上;采样控制机构连接至控制装置200上。
54.当升空采样装置100到达准确高度后,采样控制机构控制封堵盖122打开,两端都
开口的瓶身121在高空中有助于释放掉瓶身中残留的原有空气,在一定时间后充满该高度下的空气再关闭封堵盖122,进一步提高采样精度。
55.在本实施例或其他实施例中,所述采样瓶120为梭形结构,所述采样瓶120底部水平转动连接有固定块124,所述牵引绳300固定至所述固定块124上。该固定块124例如通过轴承转动连接至采样瓶120底部,牵引绳300在与固定块124固定连接后,采样瓶120在高空气流中,能够始终保持瓶身121的开口与风向一致,使气流穿过瓶身121,从而保证吹走瓶内残留的原有空气,使所采集样本完全为该高度下的空气,避免空气残留。
56.在本实施例中,采样瓶120分隔为沿轴向相互平行的两个腔室,一个腔室用于采集空气样本,另一个腔室中设置有颗粒物采样膜,用于采集高空大气中的颗粒物。
57.在本实施例或其他实施例中,所述采样控制机构包括传动轴131、驱动电机132以及采样控制板133,所述传动轴131沿所述瓶身121的轴向转动连接至所述瓶身121上,所述传动轴131的两端分别固定至两个所述封堵盖122的偏心处;所述驱动电机132通过蜗杆与所述传动轴121上的涡轮啮合;所述驱动电机132电连接至所述采样控制板133,所述采样控制板133与所述控制装置200通过有线或无线的方式信号连接。采样控制机构中可以自带有电源,仅与控制装置200进行信号连接,也可以通过控制装置200供电,以使驱动电机132动作。
58.涡轮蜗杆的配合带动传动轴131转动,从而带动封堵盖122旋转打开瓶身121两端的开口进行采样,采样完毕后反向转动使封堵盖122重新密封开口。
59.在本实施例或其他实施例中,所述控制装置200包括电源模块220、处理器210、显示器230以及输入模块240,所述电源模块220、所述显示器230、所述输入模块240、所述升空采样装置100以及所述角度检测器400均连接至所述处理器210。显示器230用于显示当前高度数值,输入模块240用于输入各种参数信息(如控制升空采样装置100开闭的信号,以及输入最后一个升空的角度检测器400的编号等),处理器210用于接收角度传感器430的角度信号,进行计算后得出高度信息,并将该高度信息发送至显示器230进行显示。处理器210还用于将输入模块240的信号进行转换并发送至升空采样装置100上使驱动电机132动作。
60.其中处理器210中还包括rs485远程通讯模块,用于处理各个角度传感器430的电信号并发送控制信号至采样控制板133,实现远距离的信号传输。
61.在本实施例或其他实施例中,所述牵引绳300包括支撑层311以及穿线管312,所述支撑层311包裹至所述穿线管312外部,支撑层311为尼龙编织绳等材质,具有一定强度和韧性,穿线管312为聚乙烯材质的柔软塑料管,所述升空采样装置100与所述控制装置200之间的导线以及所述角度检测器430与所述控制装置200之间的导线均通过所述穿线管312排布。导线连接能够提高采样精度和可靠性,支撑层311在起到主要的受力部分的同时,还能够对穿线管312起到保护的作用。
62.在其他实施例中,牵引绳300直接由尼龙编织而成,导线通过编织的方式与尼龙绳混合进行排布。
63.本装置在使用时,将本装置放置于待采样区域后,根据角度检测器之间的距离以及所需采样的高度,大致估算出需要升空的角度检测器个数,通过转动收卷辊释放高空气球,观察升空的角度检测器编号,直至达到预定的个数。
64.将最后一个升空的角度检测器编号通过输入模块输入后,处理器收集全部升空的
角度传感器的数值,计算当前升空采样装置的精确高度,再根据该高度进行调整,收卷或释放牵引绳,直至到达所需高度附近,读取最底部绳段上的数值,控制伸出长度达到所需高度后,再控制采样控制机构动作进行采样。
65.使用本高空大气污染物样本采集装置进行高空气体的样本采集,能够精确计算采样高度,并且能够精确采集一定高度处的气体样本,有助于提高高空气体的质量检测精度。
66.虽然已经通过例子对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改。本发明的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1