一种改进的基于子阵选取策略的相干信号DOA估计方法
一种改进的基于子阵选取策略的相干信号doa估计方法
技术领域
1.本发明属于雷达信号处理技术领域,涉及一种改进的基于子阵选取策略的相干信号doa估计方法。
背景技术:
2.信号的波达方向(direction-of-arrival,doa)估计是雷达、地震传感、无线通信和自动驾驶等阵列信号处理中的一项基本课题。在高斯白噪声的假设下,基于子空间的doa估计算法如music和esprit能够表现出良好的检测性能。然而,在实际系统中,由于天线阵列接收通道的非理想性和传感器响应的不均匀性,使得高斯白噪声条件无法满足。因此,不理想情况下的阵列流型矩阵会大大降低doa估计算法性能。
3.为了解决非均匀噪声背景情况下doa估计性能下降的问题,许多算法被提出。在最大似然算法中,设计了一种非均匀白噪声背景下doa估计的迭代算法。该算法依靠逐步集中的策略来对抗传感器噪声的不均匀性。还有文献设计了两种复杂度较低的子空间估计算法,该算法解决了计算信号/噪声子空间和噪声协方差参数估计时的对数似然函数和ls问题。还有一种文献提出了非迭代子空间寻向算法,该算法基于两相子空间估计技术,在计算上更加有效。
4.针对非均匀噪声背景下提出的最大似然算法,常常涉及到高度的非线性优化过程,导致计算失效。而基于子空间估计算法和非迭代子空间寻向算法,大多数都认为阵列流形确定,无法解决互耦(mc)问题给doa估计影响。
5.因此,如何解决未知非均匀噪声和互耦共存的情况下doa估计算法性能下降,成为了亟待解决的问题。
技术实现要素:
6.为了解决现有技术中存在的上述问题,本发明提供了一种改进的基于子阵选取策略的相干信号doa估计方法。本发明要解决的技术问题通过以下技术方案实现:
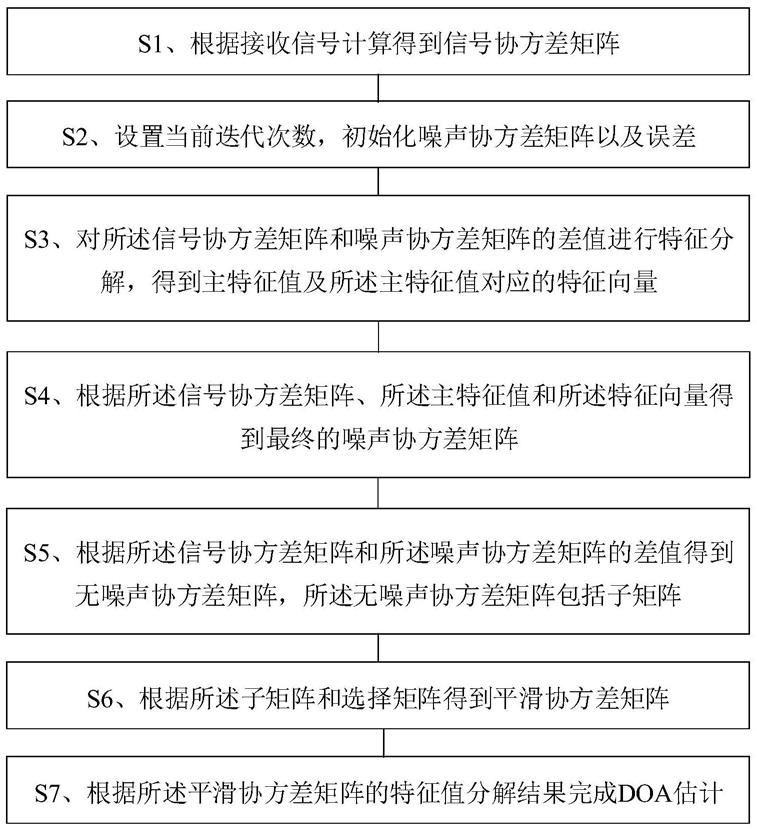
7.本发明实施例提供了一种改进的基于子阵选取策略的相干信号doa估计方法,包括以下步骤:
8.s1、根据接收信号x(t)计算得到信号协方差矩阵
9.s2、设置当前迭代次数初始化噪声协方差矩阵以及误差ε;
10.s3、对所述信号协方差矩阵和噪声协方差矩阵的差值进行特征分解,得到主特征值及所述主特征值对应的特征向量
11.s4、根据所述信号协方差矩阵所述主特征值和所述特征向量得到最终的噪声协方差矩阵
12.s5、根据所述信号协方差矩阵和所述噪声协方差矩阵的差值得到无噪声协方
差矩阵所述无噪声协方差矩阵包括子矩阵
13.s6、根据所述子矩阵和选择矩阵得到平滑协方差矩阵
14.s7、根据所述平滑协方差矩阵的特征值分解结果完成doa估计。
15.在本发明的一个实施例中,所述接收信号x(t)的表达式为:
16.x(t)=caαs1(t)+n(t)
17.其中,表示m
×
m维互耦矩阵,m表示阵元数量,toeplitz表示托普利兹矩阵,p表示互耦矩阵长度,ci表示第i个mc系数,是m
×
l维导向矢量矩阵,表示第l个信号的导向矢量,θ
l
表示第l个信号的波达方向,α=[α1,α2,
…
α
l
…
,α
l
]
t
表示非零复数向量,α
l
表示第l个信号的复包络,s1(t)表示参考信号,表示非均匀噪声矢量,(
·
)
t
代表转置操作。
[0018]
在本发明的一个实施例中,所述信号协方差矩阵的表达式为:
[0019][0020]
其中,(
·
)h表示hermitian矩阵,n表示时间采样点数。
[0021]
在本发明的一个实施例中,所述信号协方差矩阵和噪声协方差矩阵的差值为:
[0022][0023]
其中,(
·
)h表示hermitian矩阵,表示剩余的m-1个特征值组成的对角矩阵,表示从剩余特征值相关联的特征向量中获得的噪声子空间。
[0024]
在本发明的一个实施例中,步骤s4,包括:
[0025]
步骤s4.1、根据所述信号协方差矩阵所述主特征值和所述特征向量得到第次迭代时的噪声协方差矩阵
[0026]
步骤s4.2、当时,停止迭代,则所述噪声协方差矩阵作为噪声协方差矩阵否则,设置重复步骤s3和s4,直至得到最终的噪声协方差矩阵其中,||
·
||f表示f范数。
[0027]
在本发明的一个实施例中,所述噪声协方差矩阵的表达式为:
[0028][0029]
其中,(
·
)h表示hermitian矩阵,表示对角元素操作。
[0030]
在本发明的一个实施例中,所述子矩阵的表达式为:
[0031]
[0032]
其中,(
·
)h表示hermitian矩阵,表示修正的导向矢量矩阵,表示第l个信号的导向矢量,p表示互耦矩阵长度,e{
·
}表示求均值,表示修正后的等效信号波形。
[0033]
在本发明的一个实施例中,所述平滑协方差矩阵的表达式为:
[0034][0035]
其中,k表示整个阵列划分的重叠子阵列的数量,表示选择矩阵,i表示单位矩阵,表示每个子阵列包含的阵元个数,m表示阵元数量,p表示互耦矩阵长度。
[0036]
在本发明的一个实施例中,步骤s7,包括:
[0037]
步骤s7.1、对所述平滑协方差矩阵进行特征值分解得到分解后的结果;
[0038]
步骤s7.2、利用music算法或者esprit算法对分解后的结果进行处理以完成doa估计。
[0039]
与现有技术相比,本发明的有益效果:
[0040]
本发明所提供的改进的中间子阵doa估计方法可以直接应用于基于子空间的doa估计算法如music和esprit算法,可解决未知非均匀噪声和互耦共存的情况下的doa估计难题。
[0041]
通过以下参考附图的详细说明,本发明的其它方面和特征变得明显。但是应当知道,该附图仅仅为解释的目的设计,而不是作为本发明的范围的限定,这是因为其应当参考附加的权利要求。还应当知道,除非另外指出,不必要依比例绘制附图,它们仅仅力图概念地说明此处描述的结构和流程。
附图说明
[0042]
图1为本发明实施例提供的一种改进的基于子阵选取策略的相干信号doa估计方法的流程示意图;
[0043]
图2为本发明实施例提供的一种通过改进的基于子阵选取策略的相干信号doa估计方法进行doa估计的仿真图。
具体实施方式
[0044]
下面结合具体实施例对本发明做进一步详细的描述,但本发明的实施方式不限于此。
[0045]
实施例一
[0046]
请参见图1,图1为本发明实施例提供的一种改进的基于子阵选取策略的相干信号doa估计方法的流程示意图。本发明提供一种改进的中间子阵doa估计方法,该分析方法包括以下步骤:
[0047]
s1、根据接收信号x(t)计算得到信号协方差矩阵
[0048]
具体地,首先,建立信号模型,设定接收信号模型为l个相干远场窄带信号以角度θ1,θ2,
…
,θ
l
作用到m个向阵元组成的等距线阵上,则得到的接收信号x(t)的表达式可以表示为:
[0049][0050]
其中,表示m
×
l维导向矢量矩阵,θ=[θ1,θ2,
…
θ
l
…
,θ
l
]是l个信号的波达方向,θ
l
表示第l个信号的波达方向,s(t)=[s1(t),s2(t),
…sl
(t)
…
,s
l
(t)]
t
=[s1(t),α2s1(t),
…
,α
l
s1(t)]
t
表示回波信号,s
l
(t)表示第l个基带信号,基带信号是线性调频信号,(
·
)
t
表示转置操作,表示第l个信号的导向矢量,λ表示波长,dm是第m个阵元到第1个阵元之间的间距,α=[α1,α2,
…
α
l
…
,α
l
]
t
表示非零复数向量,α
l
表示第l个信号的复包络,表示非均匀噪声矢量,nm(t)表示第m个阵元的噪声。
[0051]
考虑到互耦问题,则接收信号可以表示为:
[0052][0053]
其中,表示m
×
m维互耦矩阵,toeplitz表示托普利兹矩阵,p表示互耦矩阵长度,ci表示第i个mc系数,s1(t)表示参考信号。
[0054]
接下来,估计信号协方差矩阵则信号协方差矩阵的表达式为:
[0055][0056]
其中,(
·
)h表示hermitian(厄米)矩阵,n表示时间采样点数。
[0057]
s2、设置当前迭代次数初始化噪声协方差矩阵以及误差ε。
[0058]
例如,误差ε取0.05~0.1等。
[0059]
s3、对信号协方差矩阵和噪声协方差矩阵的差值进行特征分解,得到主特征值及主特征值对应的特征向量
[0060]
在本实施例中,信号协方差矩阵和噪声协方差矩阵的差值为:
[0061][0062]
其中,为在的估计值,表示剩余的m-1个特征值组成的对角矩阵,表示从剩余特征值相关联的特征向量中获得的噪声子空间。
[0063]
s4、根据信号协方差矩阵主特征值和特征向量得到最终的噪声协方差矩阵
[0064]
在一个具体实施例中,步骤s4包括s4.1至s4.2,其中:
[0065]
步骤s4.1、根据信号协方差矩阵主特征值和特征向量得到第次迭代时的噪声协方差矩阵
[0066]
具体地,根据主特征值和特征向量计算得到
[0067][0068]
在本实施例中,噪声协方差矩阵的表达式为:
[0069][0070]
其中,表示对角元素操作。
[0071]
步骤s4.2、当时,停止迭代,则噪声协方差矩阵作为噪声协方差矩阵否则,设置重复步骤s3和s4,直至得到最终的噪声协方差矩阵其中,||
·
||f表示f范数。
[0072]
s5、根据信号协方差矩阵和噪声协方差矩阵的差值得到无噪声协方差矩阵无噪声协方差矩阵包括子矩阵
[0073]
具体地,计算出无噪声协方差矩阵无噪声协方差矩阵为:
[0074][0075]
其中,为算法收敛计算出的估计值。
[0076]
当存在互耦时,接收信号可以修正为:
[0077][0078]
其中,
[0079]
通过计算出协方差矩阵
[0080][0081]
其中,表示修正的导向矢量矩阵,e{
·
}表示求均值,表示修正后的等效信号波形,为的子矩阵。
[0082]
s6、根据子矩阵和选择矩阵得到平滑协方差矩阵
[0083]
具体地,将整个阵列划分为k个重叠子阵列,然后计算出平滑协方差矩阵
[0084]
[0085]
其中,k表示整个阵列划分的重叠子阵列的数量,表示选择矩阵,i表示单位矩阵,表示每个子阵列包含的阵元个数。
[0086]
s7、根据平滑协方差矩阵的特征值分解结果完成doa估计。
[0087]
在一个具体实施例中,步骤s4包括s7.1至s7.2,其中:
[0088]
步骤s7.1、对平滑协方差矩阵进行特征值分解得到分解后的结果;
[0089]
步骤s7.2、利用music算法或者esprit算法对分解后的结果进行处理以完成doa估计。
[0090]
本发明提出的方法可以有效地解决互耦和非均匀噪声场景下,相干信号的doa估计。
[0091]
仿真实验可以进一步证明本发明的有益效果。
[0092]
仿真实验使用标准的等距线阵,阵元数为12,阵元间距是半波长,互耦矩阵的长度为3,为了衡量doa估计性能,将输入信噪比定义为:
[0093][0094]
其中,表示输入信号功率,表示第m个阵元的噪声功率。
[0095]
仿真假设非均匀噪声协方差矩阵为:
[0096]
q=[6.0,10.0,2.5,5.0,0.5,3.5,2.0,5.0,7.5,9.0,1.5,6.5]
ꢀꢀꢀꢀ
(12)
[0097]
仿真实验一:假设三个相干信号以{-5
°
,5
°
,15
°
}角度作用于一维等距线阵上,信噪比为5db,快拍数为500。图2表示20次独立实验,通过所提方法进行doa估计的仿真图。显然,可以看到,在互耦和非均匀噪声互存的情况下,所提的修正的中间子阵方法能够有效的对目标进行检测。
[0098]
在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0099]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特数据点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特数据点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
[0100]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1