基于机载雷达主被动监视的航迹融合方法与流程
1.本发明涉及雷达技术领域,具体涉及一种基于机载雷达主被动监视的航迹融合方法。
背景技术:
[0002]“黑飞”无人机和飞鸟扰航、碰撞事件时有发生,已成为航空器飞行时的重大安全隐患之一。凭借全天候、全天时、大范围的探测能力,机载雷达已成为监视“黑飞”无人机和飞鸟等“低小慢”目标的主要方式之一。然而,随着低空合作式民用航空器日益密集,特别是机场附近,对于雷达探测和跟踪“黑飞”无人机和飞鸟造成了大量的“干扰”。广播式自动相关监视系统是民用航空器强制安装的广播式自动相关监视系统,通过广播式自动相关监视系统发射机发送的数据,可以实时掌握航空器的位置、速度及航班号等信息。
技术实现要素:
[0003]
有鉴于此,本说明书实施例提供一种基于机载雷达主被动监视的航迹融合方法,以达到提升机载气象雷达在起飞和进近阶段对机场低空环境的综合监视能力。
[0004]
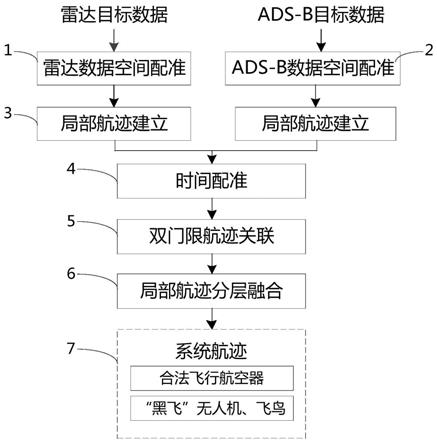
本说明书实施例提供以下技术方案:一种基于机载雷达主被动监视的航迹融合方法,包括:步骤一、将雷达目标检测点从以雷达为原点的极坐标系坐标转换到以雷达为原点的直角坐标系坐标;步骤二、将广播式自动相关监视系统目标从wgs-84坐标系经纬高坐标转换到以雷达为原点的直角坐标系坐标;步骤三、分别建立雷达和广播式自动相关监视系统的局部航迹;步骤四、计算各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹在融合时刻的目标状态;步骤五、判断设定的一条雷达的局部航迹是否与多条广播式自动相关监视系统的局部航迹中的一条广播式自动相关监视系统的局部航迹关联;步骤六、若步骤五中的关联判定结果为是,则对设定的雷达的局部航迹与对应关联的一条广播式自动相关监视系统的局部航迹进行局部航迹分层融合;步骤七、重复步骤五和步骤六,将各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹依次进行关联判别和局部航迹分层融合。
[0005]
进一步地,步骤一具体为:获取雷达目标检测点的数据,并根据雷达目标检测点的径向距离、方位角和俯仰角将雷达目标检测点的坐标转化为以雷达为原点的直角坐标系坐标。
[0006]
进一步地,步骤二具体为:获取广播式自动相关监视系统的目标检测点数据,根据广播式自动相关监视系统的目标检测点的经度、纬度和高度以及雷达的经度、纬度和高度将广播式自动相关监视系统的目标检测点的坐标转化为以雷达为原点的直角坐标系坐标。
[0007]
进一步地,步骤三包括:步骤3.11、对雷达目标检测点的数据进行关联和滤波处理,得到多条雷达的局部航迹;步骤3.12、获取在雷达的当前更新时刻三条雷达的局部航迹的目标状态估计值,其中,第一条雷达的局部航迹的目标状态估计值为第二条雷达的局部航迹的目标状态估计值为
第三条雷达的局部航迹的目标状态估计值为步骤3.13、根据步骤3.12获取三条雷达的局部航迹的协方差估计值,其中,第一条雷达的局部航迹的协方差估计值为第二条雷达的局部航迹的协方差估计值为第三条雷达的局部航迹的协方差估计值为
[0008]
进一步地,步骤三还包括:步骤3.21、对广播式自动相关监视系统的目标检测点的数据进行关联和滤波处理,得到多条广播式自动相关监视系统的局部航迹;步骤3.22、获取在广播式自动相关监视系统的当前更新时刻两条广播式自动相关监视系统的局部航迹的目标状态估计值,其中,第一条广播式自动相关监视系统的局部航迹的目标状态估计值为第二条广播式自动相关监视系统的局部航迹的目标状态估计值为步骤3.23、根据步骤3.22获取两条广播式自动相关监视系统的局部航迹的协方差估计值,其中,第一条广播式自动相关监视系统的
局部航迹的协方差估计值为第二条广播式自动相关监视系统的局部航迹的协方差估计值为
[0009]
进一步地,步骤四包括:步骤4.1、以各条广播式自动相关监视系统的局部航迹的更新时刻作为融合时刻;步骤4.2、计算各条广播式自动相关监视系统的局部航迹在融合时刻下的状态预测值、协方差预测值、状态估计值和协方差估计值;步骤4.3、计算各条雷达的局部航迹在融合时刻下的状态预测值、协方差预测值、状态估计值和协方差估计值。
[0010]
进一步地,步骤五包括:步骤5.1、计算设定的一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹之间的统计距离;步骤5.2、设定门限值以及一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹之间的关联计数器,当统计距离小于门限值时,则使关联计数器的值加一并获得新的关联计数器值;步骤5.3、设定关联次数门限,当新的关联计数器值大于关联次数门限时,则判定一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹为同一目标航迹;步骤5.4、重复步骤5.1至步骤5.3,以获得各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹之间的关联判定结果。
[0011]
进一步地,步骤六包括:步骤6.1、通过公式计算一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹融合后的系统航迹协方差估计值;步骤6.2、通过公式计算一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹融合后的系统航迹状态估计值。
[0012]
与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:本发明实施例实现对低空合作和非合作式目标的综合监视,同时实现对“黑飞”无人机和飞鸟等“低小慢”目标的重点监视。本发明可提升机载气象雷达在起飞和进近阶段对机场低空环境的综合监视能力。
附图说明
[0013]
为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0014]
图1是本发明实施例的流程示意图。
具体实施方式
[0015]
下面结合附图对本技术实施例进行详细描述。
[0016]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0017]
如图1所示,本发明实施例提供了一种基于机载雷达主被动监视的航迹融合方法,包括:
[0018]
步骤一、将雷达目标检测点从以雷达为原点的极坐标系坐标转换到以雷达为原点的直角坐标系坐标;
[0019]
步骤二、将广播式自动相关监视系统目标从wgs-84坐标系经纬高坐标转换到以雷达为原点的直角坐标系坐标;
[0020]
步骤三、分别建立雷达和广播式自动相关监视系统的局部航迹;
[0021]
步骤四、计算各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹在融合时刻的目标状态;
[0022]
步骤五、判断设定的一条雷达的局部航迹是否与多条广播式自动相关监视系统的局部航迹中的一条广播式自动相关监视系统的局部航迹关联;
[0023]
步骤六、若步骤五中的关联判定结果为是,则对设定的雷达的局部航迹与对应关联的一条广播式自动相关监视系统的局部航迹进行局部航迹分层融合;
[0024]
步骤七、重复步骤五和步骤六,将各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹依次进行关联判别和局部航迹分层融合。
[0025]
本发明实施例实现对低空合作和非合作式目标的综合监视,同时实现对“黑飞”无人机和飞鸟等“低小慢”目标的重点监视。本发明可提升机载气象雷达在起飞和进近阶段对机场低空环境的综合监视能力。
[0026]
步骤一具体为:获取雷达目标检测点的数据,并根据雷达目标检测点的径向距离、方位角和俯仰角将雷达目标检测点的坐标转化为以雷达为原点的直角坐标系坐标。
[0027]
步骤二具体为:获取广播式自动相关监视系统的目标检测点数据,根据广播式自动相关监视系统的目标检测点的经度、纬度和高度以及雷达的经度、纬度和高度将广播式自动相关监视系统的目标检测点的坐标转化为以雷达为原点的直角坐标系坐标。
[0028]
步骤三包括:
[0029]
步骤3.11、对雷达目标检测点的数据进行关联和滤波处理,得到多条雷达的局部航迹;
[0030]
步骤3.12、获取在雷达的当前更新时刻三条雷达的局部航迹的目标状态估计值,其中,第一条雷达的局部航迹的目标状态估计值为第
二条雷达的局部航迹的目标状态估计值为第三条雷达的局部航迹的目标状态估计值为
[0031]
步骤3.13、根据步骤3.12获取三条雷达的局部航迹的协方差估计值,其中,第一条雷达的局部航迹的协方差估计值为第二条雷达的局部航迹的协方差估计值为第三条雷达的局部航迹的协方差估计值为
[0032]
步骤三还包括:
[0033]
步骤3.21、对广播式自动相关监视系统的目标检测点的数据进行关联和滤波处理,得到多条广播式自动相关监视系统的局部航迹;
[0034]
步骤3.22、获取在广播式自动相关监视系统的当前更新时刻两条广播式自动相关监视系统的局部航迹的目标状态估计值,其中,第一条广播式自动相关监视系统的局部航迹的目标状态估计值为第二条广播式自动相关监视系统的局部航迹的目标状态估计值为
[0035]
步骤3.23、根据步骤3.22获取两条广播式自动相关监视系统的局部航迹的协方差估计值,其中,第一条广播式自动相关监视系统的局部航迹的协方差估计值为
第二条广播式自动相关监视系统的局部航迹的协方差估计值为
[0036]
步骤四包括:
[0037]
步骤4.1、以各条广播式自动相关监视系统的局部航迹的更新时刻作为融合时刻;
[0038]
步骤4.2、计算各条广播式自动相关监视系统的局部航迹在融合时刻下的状态预测值、协方差预测值、状态估计值和协方差估计值;
[0039]
步骤4.3、计算各条雷达的局部航迹在融合时刻下的状态预测值、协方差预测值、状态估计值和协方差估计值。
[0040]
步骤五包括:
[0041]
步骤5.1、计算设定的一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹之间的统计距离;
[0042]
步骤5.2、设定门限值以及一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹之间的关联计数器,当统计距离小于门限值时,则使关联计数器的值加一并获得新的关联计数器值;
[0043]
步骤5.3、设定关联次数门限,当新的关联计数器值大于关联次数门限时,则判定一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹为同一目标航迹;
[0044]
步骤5.4、重复步骤5.1至步骤5.3,以获得各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹之间的关联判定结果。
[0045]
步骤六包括:
[0046]
步骤6.1、通过公式计算一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹融合后的系统航迹协方差估计值;
[0047]
步骤6.2、通过公式计算一条雷达的局部航迹与一条广播式自动相关监视系统的局部航迹融合后的系统航迹状态
估计值。
[0048]
现有雷达和广播式自动相关监视系统的数据融合通常采用简单的加权平均方法,且仅在融合时刻进行两种航迹数据的加权,没有考虑雷达和广播式自动相关监视系统各自对目标航迹的估计误差以及估计误差的相关性,也没有考虑先前时刻融合得到的系统航迹数据,造成融合精度较低。本发明提出了一种局部航迹分层融合方法,充分利用雷达、广播式自动相关监视系统及系统航迹的目标状态估计值和先验信息,融合航迹精度高。
[0049]
现有雷达和广播式自动相关监视系统的局部航迹关联判断是否探测到同一目标,仅通过计算单个融合时刻目标之间的距离,并与固定阈值进行比较来判断。当有两个空中目标进行近距离交叉飞行或者相向飞行时,这种方法很容易产生关联错误,降低了航迹融合的准确性。本发明提出了一种双门限航迹关联方法,通过计算连续几个融合时刻目标间的统计距离是否小于设定的门限来进行航迹关联判断,有效减少了关联错误概率,提升了航迹融合的可靠性。
[0050]
本发明实施例的具体应用实例如下:
[0051]
雷达目标的数据更新周期t
radar
为2s,广播式自动相关监视系统目标的数据更新周期t
ads-b
为1s。
[0052]
步骤1:获得7个雷达目标检测点数据,根据各个目标检测点的径向距离、方位角和俯仰角,将目标检测点坐标转换为以雷达为原点的三维直角坐标系坐标。
[0053]
步骤2:获得4个广播式自动相关监视系统目标检测点数据,根据各个目标检测点的经度、纬度和高度以及雷达的经度、纬度和高度,将目标检测点坐标转换为以雷达为原点的三维直角坐标系坐标。
[0054]
步骤3:对雷达目标检测点数据进行航迹起始、点迹与航迹关联、航迹滤波更新处理,得到雷达局部航迹3条。在k1t
radar
时刻,第1条局部航迹更新后的目标状态估计值为第2条局部航迹更新后的目标状态估计值为第3条局部航迹更新后的目标状态估计值为3条航迹更新后的协方差估计值分别为
[0055]
[0056][0057][0058]
对广播式自动相关监视系统目标检测点数据进行航迹起始、点迹与航迹关联、航迹滤波更新处理,得到广播式自动相关监视系统局部航迹2条。在k2t
ads-b
时刻,第1条局部航迹更新后的目标状态估计值为第2条局部航迹更新后的目标状态估计值为2条局部航迹更新后的协方差估计值分别为
[0059][0060][0061]
步骤4:以广播式自动相关监视系统数据更新周期为数据融合周期,即融合周期为1s。当前融合时刻广播式自动相关监视系统局部航迹的状态预测值、协方差预测值、状态估计值和协方差估计值直接使用当前时刻广播式自动相关监视系统局部航迹更新后的对应参数。依据kalman滤波方法,计算得到当前融合时刻各条雷达局部航迹的目标状态,第1条
雷达局部航迹的目标状态估计值为第2条雷达局部航迹的目标状态估计值为第3条雷达局部航迹的目标状态估计值为雷达局部航迹目标状态预测值与估计值相同。
[0062]
步骤5:根据当前融合时刻各条雷达局部航迹和广播式自动相关监视系统局部航迹的目标参数,计算可得:第1条雷达局部航迹可以与第1条广播式自动相关监视系统局部航迹关联,第2条雷达局部航迹没有可以关联的广播式自动相关监视系统局部航迹,第3条雷达局部航迹可以与第2条广播式自动相关监视系统局部航迹关联。
[0063]
步骤6:对相关联的雷达局部航迹与广播式自动相关监视系统航迹局部进行融合。
[0064]
上一融合时刻融合得到1条系统航迹,为第1条雷达局部航迹和第1条广播式自动相关监视系统局部航迹进行融合得到的,上一融合时刻该系统航迹更新后的目标状态估计值为协方差估计值为
[0065][0066]
依据kalman滤波方法,可以计算得到该系统航迹当前融合时刻的目标状态预测值为协方差预测值为
[0067][0068]
计算得到当前融合时刻第1条雷达局部航迹和第1条广播式自动相关监视系统局部航迹融合后的系统航迹目标状态估计值为协方差估计值为
[0069][0070]
第3条雷达局部航迹和第2条广播式自动相关监视系统局部航迹上一融合时刻还未融合得到系统航迹,则当前融合时刻融合得到的对应系统航迹的目标状态估计值为协方差估计值为
[0071][0072]
步骤7:通过雷达与广播式自动相关监视系统局部航迹的融合,得到2条可以进行融合的雷达局部航迹,1条不能进行融合的雷达局部航迹,不能进行融合的雷达局部航迹就可能为“黑飞”无人机和飞鸟目标航迹,从而完成对“黑飞”无人机和飞鸟目标的有效探测与监视。
[0073]
以上所述,仅为本发明的具体实施例,不能以其限定发明实施的范围,所以其等同组件的置换,或依本发明专利保护范围所作的等同变化与修饰,都应仍属于本专利涵盖的范畴。另外,本发明中的技术特征与技术特征之间、技术特征与技术方案之间、技术方案与技术方案之间均可以自由组合使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1