一种输电线路绝缘子挠度检测方法与流程
1.本发明属于图像处理和输电线路绝缘子的维护技术领域,尤其涉及到一种输电线路绝缘子挠度的检测方法。
背景技术:
2.水平安装支柱瓷绝缘子断裂事故时有发生,严重威胁到了现场检测人员的安全和电网安全可靠的运行。2015年,贵州某500kv变电站11.2kv融冰管母户外瓷支柱绝缘子生“多米诺骨牌”式断裂。b、c相支柱绝缘子从根部断裂,b、c相管母整体坠落,a相3只绝缘子变形,1只断裂。母线掉落后有明显的弯曲变形和碰撞痕迹。水平安装支柱式绝缘子在长期恶劣的环境运行,和自身重力的影响下,很容易产生不同程度的弯曲。这些挠度或大或小,挠度大的绝缘子容易发生断裂;挠度小的绝缘子对绝缘等电气性能方面也有一定影响,从而对电网的安全和平稳运行产生了危害。
3.电网中投入运行的绝缘子数目巨大,每次巡检都要花费相当大的人力物力。有些绝缘子挠度不大,导致肉眼很难识别。而对于已投入运行的绝缘子,传统的绝缘子挠度描述大部分都是模糊的,如:“挠度不大,对安全没有影响或是挠度比较大,对电网的安全运行已经产生了影响。”没有一个量化的指标记录,从而导致绝缘子的挠度对电网的影响缺少了后续的大数据分析支持。很多输电线路都架设在高海拔,山地地区,环境恶劣,使得人工现场勘察存在较大的风险和困难,同时对一些挠度不大,但却可能影响电网运行的绝缘子很容易漏检。因此,输电线路绝缘子挠度的检测问题仍亟待解决,输电线路绝缘子挠度的自动、快速、准确检测在实际工程中具有很高的实用价值。
4.目前输电线路上的水平安装支柱绝缘子挠度尚无有效的检测方法,特别是图像检测方法。
技术实现要素:
5.针对上述问题,本发明提出了一种输电线路绝缘子挠度检测方法,通过手持设备,能够快速准确的定位待检测绝缘子,能够自动计算出绝缘子的挠度和弧度,从而对绝缘子的挠度检测提供量化指标,有利于维护电力系统的正常可靠运行。
6.为了达到上述目的,本发明采用如下技术方案:
7.一种输电线路绝缘子挠度检测方法,包括如下步骤:
8.s1绝缘子图像获取,通过连接移动端摄像头获取待检测绝缘子的图像;
9.获取绝缘子图像具体为:
10.s1.1对双目摄像头进行标定修正;
11.s1.2利用与移动手持设备相连接的双目摄像头采集包括待检测绝缘子在内的完整现场图像,对其进行预处理;
12.s2通过yolo-fastest算法获取绝缘子前景信息,得到待测绝缘子在采集图像上的位置与尺寸信息。
13.通过yolo-fastest算法获取绝缘子前景信息具体为:
14.s2.1对现场采集到的大量绝缘子图像进行标注,生成学习样本文件;
15.s2.2通过yolo-fastest算法对绝缘子标注学习样本文件进行深度学习,获取待测绝缘子前景图像和前景框位置、尺寸信息。
16.s3结合grabcut算法进行前景与背景的分割;
17.结合grabcut算法进行前景与背景的分割具体为:
18.s3.1根据yolo-fastest算法返回的待测绝缘子前景图像和前景框位置、尺寸信息,使用高斯混合模型gmm对前景和背景进行建模,初始化位置框内除目标像素点外的像素点,即作为“可能是目标的像素点”;
19.s3.2对每个像素分配高斯混合模型gmm中的高斯分量;
20.s3.3对于给定的图像数据,学习优化高斯混合模型gmm的参数;
21.s3.4根据输入图像,得到图像gibbs能量函数建立流量网络描述图像,通过计算出区域能量项和边界能量项优化能量函数,使图像的总能量达到最小,即gibbs能量函数取得最小值;
22.s3.5然后通过最大流、最小割算法来进行分割;经过最大流最小割算法分割后,每个像素属于目标还是背景就变了,又由于步骤s3.2到s3.4是能量递减的过程,故保证迭代过程会收敛;重复步骤s3.2到s3.4使得迭代能量最小化即收敛,从而最终分割出图像的前景和背景,进而得到待检测绝缘子的图像。
23.s4对分割结果进行灰度化和二值化处理,经过中值滤波,滤除环境噪声;
24.对分割结果进行灰度化和二值化处理具体为:
25.s4.1将三通道rgb前景图像进行灰度化,使前景图像降为一通道灰度图,方便之后的二值化处理;其中,灰度化处理系数按照下式进行计算:
26.gray=0.3r+0.59g+0.11b;
27.s4.2计算像素点矩阵中的所有像素点的灰度值的平均值avg,将该平均值设置为二值化处理的阈值;
28.s4.3让图像中每一个像素点与平均值avg进行比较,小于等于平均值avg的像素点为0(黑色),大于平均值avg的像素点为255(白色);
29.s4.4创建3*3像素矩阵遍历处理后的图像,3*3像素矩阵里面有9个像素点,将9个像素进行排序,将这个像素矩阵的中心点赋值为这九个像素的中值作为输出;
30.s4.5然后,重复步骤s4.4直至收敛,从而滤除椒盐噪声,得到清晰的待检测绝缘子二值化图像。
31.s5通过骨架提取算法提取出绝缘子的骨架。
32.通过骨架提取算法zhang-suen algorithm提取出绝缘子的骨架具体为:
33.s5.1在待检测绝缘子二值化图像中,腐蚀满足如下条件之一的像素点;
34.(a)2≤b(p1)≤6
35.(b)a(p1)=1
36.(c)p2×
p4×
p6=0
37.(d)p4×
p6×
p8=0;
38.式中,a(p1)就是有序集合p2,p3,p4,
…
,p8,p9中的01模式的数量,而b(p1)是非0邻
居的数量。
39.s5.2重复以上的步骤,直至没有像素点被腐蚀掉为止,迭代结束,从而得到绝缘子1像素宽的骨架。
40.s6对绝缘子骨架用最小二乘法进行二次拟合,根据拟合方程对绝缘子的挠度进行计算,若挠度值超出绝缘子使用的安全阈值,发出危险预警信号;
41.对绝缘子骨架用最小二乘法进行二次拟合,根据拟合方程对绝缘子的挠度进行计算具体为:
42.s6.1以绝缘子骨架的两端点连接线为x轴,其中一端点为原点建立坐标系;
43.s6.2设拟合的二次曲线方程为y=ax2+bx+c,先求出绝缘子骨架各点到拟合曲线上的距离的平方和,求出使得该平方和最小的a,b,c;
44.s6.3从而得到绝缘子骨架的二次方程,计算该一元二次方程的最大值,该最大值就是待检测绝缘子的挠度。
45.本文提出在yolo-fastest算法获取绝缘子图像前景信息的基础上,通过grabcut算法对待检测绝缘子进行图像分割,再对分割结果进行灰度和二值化处理,经过中值滤波,利用zhang-suen算法提取出绝缘子的骨架,最后对绝缘子骨架进行二次拟合,进而计算出绝缘子的挠度弧度等信息。与现有的技术相比较,本发明具有以下的优点:
46.1、本发明结合已知开源最快的最轻量的目标检测yolo-fastest算法,该算法能对绝缘子前景图像进行快速定位,并且对硬件性能的要求极低,完全适用于灵活方便,但性能较低的移动终端进行边缘计算;
47.2、本发明利用grabcut算法进行前景背景分割,具有较高的分割精度;
48.3、本发明能自动获取待测绝缘子的前景信息和前景框的位置和尺寸,减少了传统grabcut中人工操作的部分,提高了整体的检测效率;
49.4、本发明使用方便,非常人性化,只需要用户拍摄一个绝缘子照片作为输入,其他部分完全交给计算机去实现;
50.5、本发明可以通过图像自动检测计算绝缘子的挠度,是一种直观、方便、有效的绝缘子挠度检测方法。
附图说明
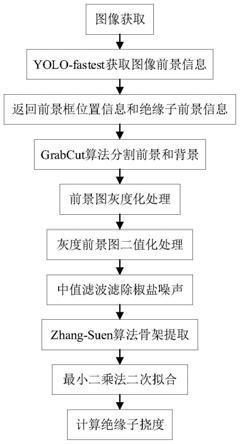
51.图1为本发明实施例的方法流程示意图。
52.图2为yolo-fastest算法返回的待检测绝缘子前景图像信息图。
53.图3为grabcut分割得到的绝缘子前景图。
54.图4为灰度化和二值化处理的结果。
55.图5为绝缘子骨架提取图。
56.图6为最小二乘法二次拟合曲线结果。
具体实施方式
57.以下结合实施例与附图对本发明的具体实施方式做进一步阐述。
58.本发明一种输电线路绝缘子挠度检测方法,基于移动端嵌入式平台,实现对输电线路上绝缘子挠度的快速检测。针对嵌入式计算平台受体积、功耗的限制、计算能力弱等特
点,采用已知开源最快的最轻量的目标检测yolo-fastest算法,结合grabcut图像分割算法和zhang-suen骨架提取算法,设计一种适用于移动端中小型设备的绝缘子挠度检测方法。
59.如图1,一种输电线路的绝缘子挠度检测方法,包括如下步骤:
60.s1图像获取,具体如下:
61.s1.1对双目摄像头进行标定修正,以消除摄像头畸变给计算绝缘子挠度时带来的误差;
62.s1.2将标定修正后的摄像头与通过一个角度可变支架与移动端嵌入式设备相连接,采集包括待检测绝缘子在内的完整现场图像,对其进行预处理;
63.s2采用已知开源最快的最轻量的目标检测yolo-fastest对前级待测绝缘子前景图像信息做初步快速提取,得到待测绝缘子在采集图像上的位置与尺寸信息,具体如下:
64.s2.1对现场采集到的大量绝缘子图像进行标注,生成学习样本文件;
65.s2.2通过yolo-fastest算法对绝缘子标注学习样本文件进行训练学习,生成预训练模型(骨干网络);
66.s2.3在预训练模型的基础上拿绝缘子标注学习样本文件进行训练,完成模型的迁移学习,从而得到待测绝缘子前景图像和前景框位置(x,y)、尺寸信息(w,h)。
67.s3结合grabcut算法进行前景与背景的分割,得到精细的待检测前景绝缘子图像,具体如下:
68.s3.1根据yolo-fastest算法返回的待测绝缘子在图像上的前景框位置和尺寸、前景图像信息,如图2,初始化位置框内除目标像素点外的像素点。
69.s3.2使用高斯混合模型(gmm)对前景和背景进行建模(其中混合高斯密度模型是如下形式),求出每个像素αn对应的高斯混合模型gmm参数kn,kn=arg min dn(αn,kn,θ,xn);
[0070][0071][0072]
其中,αn是图像中的像素点;kn为像素第kn个高斯分量;θ是每个子模型的期望、方差在混合模型中发生的概率;xn是rgb三通道向量;μ为每个高斯分量的均值向量;∑为协方差矩阵。
[0073]
s3.3对每个像素α标记进行优化,即作为“可能是目标的像素点”。
[0074]
s3.4对于给定的图像数据z,构建流量网络描述图像,用最大流最小割算法不断迭代,学习优化高斯混合模型gmm的参数,从而得到gibbs能量的区域能量项。
[0075]
s3.5通过计算出gibbs能量的边界能量项;其中γ常数50;‖z
m-zn‖2为欧氏距离衡量两像素的相似性;参数β由图像的对比度决定,如果图像的对比度较高,通常取一个较小的β,而如果图像的对比度较低,也就是说本身有差别的像素m和n,它们的差‖z
m-zn‖比较低,那么需要乘以一个比较大的β来放大这种差别,使得项即边界能量项能在对比度高或者低的情况下都可以正常工作。
[0076]
s3.6然后通过最大流、最小割算法来进行分割。经过最大流最小割算法分割后,每个像素属于目标还是背景就变了,又由于步骤s3.2到s3.5是能量递减的过程,故可以保证
迭代过程会收敛。重复以上三个步骤,使得迭代能量最小化(收敛),从而最终分割出图像的前景和背景,进而得到待检测绝缘子的图像,如图3所示。
[0077]
s4对分割得到的绝缘子图像进行灰度化和二值化处理,经过中值滤波,滤除环境噪声,具体如下:
[0078]
s4.1将三通道rgb前景图像进行灰度化,使前景图像降为一通道灰度图,方便之后的二值化处理。其中,灰度化处理系数按照下式进行计算:
[0079]
gray=0.3r+0.59g+0.11b;
[0080]
s4.2计算像素点矩阵中的所有像素点的灰度值的平均值avg,将该平均值设置为二值化处理的阈值;
[0081]
s4.3让图像中每一个像素点与平均值avg进行比较,小于等于平均值avg的像素点为0(黑色),大于avg的像素点为255(白色);从而得到绝缘子灰度化和二值化图像。
[0082]
s4.4接下来,对灰度化和二值化图像进行中值滤波。创建3*3像素矩阵遍历处理后的图像,3*3像素矩阵里面有9个像素点,将9个像素进行排序,将这个像素矩阵的中心点赋值为这九个像素的中值作为输出;
[0083]
s4.5然后,重复步骤s4.4直至收敛,从而滤除椒盐噪声,得到清晰的待检测绝缘子二值化图像。灰度化和二值化处理完成后的结果如图4所示。
[0084]
s5通过骨架提取算法zhang-suen algorithm提取出绝缘子的骨架,具体如下:
[0085]
s5.1在绝缘子二值化图像中,依据两组逻辑规则对图像像素点进行腐蚀判断,两组逻辑规则如下:腐蚀满足如下条件之一的像素点;
[0086]
(a)2≤b(p1)≤6
[0087]
(b)a(p1)=1
[0088]
(c)p2×
p4×
p6=0
[0089]
(d)p4×
p6×
p8=0
[0090]
pi(i=1,2,
…
,8)依次为前景像素p的八个领域像素的值;
[0091]
式中,a(p1)就是有序集合p2,p3,p
p
,
…
,p8,p9中的01模式的数量,而b(p1)是非0邻居的数量。
[0092]
s5.2重复以上的步骤,直至没有像素点被腐蚀掉为止,迭代结束,从而得到绝缘子1像素宽的骨架,如图5所示。
[0093]
s6对绝缘子骨架用最小二乘法进行二次拟合,根据拟合方程对绝缘子的挠度进行计算,若挠度值超出绝缘子使用的安全阈值,发出危险预警信号,具体如下:
[0094]
s6.1以绝缘子骨架的两端点连接线为x轴,其中一端点为原点建立坐标系;
[0095]
s6.2设拟合的二次曲线方程为y=ax2+bx+c,先求出绝缘子骨架各点到拟合曲线上的距离的平方和,求出使得该平方和最小的a,b,c;
[0096]
s6.3从而得到绝缘子骨架的二次方程,绝缘子骨架拟合后的二次曲线如图6所示。最后计算出该一元二次方程的最大值,该最大值就是待检测绝缘子的挠度;
[0097]
s6.4生成绝缘子的检测说明和检测报告;
[0098]
s6.5当检测出该型号绝缘子真实挠度大于阈值t时,对现场检修人员发出危害提醒。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1