一种用于压力管道检测的在线无损探伤仪的制作方法
1.本发明涉及管道探伤技术领域,具体为一种用于压力管道检测的在线无损探伤仪。
背景技术:
2.金属管道成型后,以及管道焊接后的焊缝都需要进行无损探伤检测,用以检验金属管道以及焊接缝处是否有裂缝、杂质等,属于重要的检验工序,其中超声波探伤(简称pt探伤)应用较为广泛。
3.现有技术中在对管道进行超声波探伤时,由于管道呈圆柱形,且通常需要检测的管道长度都较长时,人员利用探伤器对管道进行逐点探伤较为繁琐,费时费力,且探伤位置难以准确把握,导致部分有裂痕的部分未能被精准探测,检测精确度不足,且现有的检测仪无法针对管道直径变化进行相应的变化,使得对管道检测精确度不足。
4.基于此,本发明设计了一种用于压力管道检测的在线无损探伤仪,以解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种用于压力管道检测的在线无损探伤仪,以解决上述背景技术中提出了现有技术中在对管道进行超声波探伤时,由于管道呈圆柱形,且通常需要检测的管道长度都较长时,人员利用探伤器对管道进行逐点探伤较为繁琐,费时费力,且探伤位置难以准确把握,导致部分有裂痕的部分未能被精准探测,检测精确度不足,且现有的检测仪无法针对管道直径变化进行相应的变化,使得对管道检测精确度不足的问题。
6.为实现上述目的,本发明提供如下技术方案:一种用于压力管道检测的在线无损探伤仪,包括固定环,所述固定环内部连接有用于驱动固定环沿管道移动的驱动机构,所述驱动机构可沿不同直径大小的管道进行移动,所述固定环内侧壁上转动连接有第一转环,所述第一转环内部滑动连接有若干呈圆周阵列的探伤器,所述探伤器两两相对布置,且所述探伤器包围管道用于对管道进行检测,所述第一转环外侧设有用于调节若干探伤器的调节机构,所述固定环外表面上连接有驱动第一转环转动的转动机构,所述固定环外表面上固定连接有控制器,所述控制器用于控制驱动机构和转动机构进行交替动作;
7.所述转动机构包括第一电机,所述第一电机固定连接在固定环的外表面上,所述第一电机的输出轴端固定连接有第一齿轮,所述第一转环外表面上固定连接有第一齿圈,所述第一齿圈与第一齿轮相啮合;
8.所述驱动机构包括四组沿固定环边缘呈圆周分布阵列的驱动件,每个所述驱动件均包括有两个第一滑板,两个所述第一滑板均贯穿固定环并与其滑动连接,两个所述第一滑板内侧共同转动连接有滚轮,所述滚轮的转轴端部固定连接有驱动电机,所述驱动电机固定连接在第一滑板的侧壁上,所述固定环的外表面上固定连接有调节气缸,两个所述第一滑板外端共同固定连接有调节板,所述调节气缸外端与调节板固定连接;
9.所述调节机构包括若干第一推杆,所述第一推杆转动连接在探伤器外表面上,所述第一转环左端开设有第一滑槽,若干所述第一推杆内端均转动连接第一滑杆,所述第一滑杆均滑动连接在第一滑槽内,若干所述第一滑杆外端共同转动连接有调节环,所述调节环位于第一转环的左侧,所述调节环侧壁上连接有用于在调节完成后定位调节环的定位机构;
10.所述定位机构包括第一固定块,所述第一固定块固定连接在调节环的外表面上,所述第一转环外表面上固定连接有紧固板,所述紧固板内部开合有第二滑槽,所述第一固定块内部螺纹连接有紧固螺杆,所述紧固螺杆右端转动连接有第一挡盘;
11.每个所述探伤器的外表面上均固定连接有第二挡盘,所述第二挡盘位于第一转环的内侧,每个所述探伤器外表面上均套设有位于第二挡盘和第一转环之间的第一弹簧;
12.每个所述第一推杆与探伤器的转动轴端均固定连接有刮料板,所述刮料板右侧壁与调节环相接触,若干所述刮料板用于对管道外表面进行清洁。
13.与现有技术相比,本发明的有益效果是:
14.1.本发明通过在每次对管道进行探伤检测时,利用驱动机构和调节机构进行自适配管道直径大小的检测,驱动机构能满足在不同直径管道的驱动效果,调节机构能调节探伤器距离管道外表面的距离,有利于探伤器对管道内部的裂痕的准确检测,并利用转动机构带动探伤器进行圆周转动探伤,使得对管道的外表面进行全覆盖式的探伤检测,检测更加准确,利用控制器交错控制驱动机构和转动机构,自动实现分段间歇式探伤,能自发完全对长管道的全方位的探伤检测,检测结果更加可靠。
15.2.本发明通过转动调节环,调节环带动第一滑杆在第一滑槽内滑动,第一滑杆推动第一推杆,第一推杆同步带动探伤器,使探伤器其进行向外或向内的滑动,调节探伤器与管道外表面的距离,避免探伤器内端与管道外表面接触,保护探伤器的内端探头,从而实现对若干探伤器同步进行高度的调节,有利于探伤器的探伤。
16.3.本发明通过在调节完成后,转动紧固螺杆,紧固螺杆螺纹连接在第一固定块内,使得紧固螺杆向外侧移动,将第一挡盘拉紧贴靠在紧固板上,从而将调节环和第一转环紧固在一起,避免调节环自发转动,第二滑槽用于在调节环调节时,带动紧固螺杆在第二滑槽内滑动,满足调节的特征。
附图说明
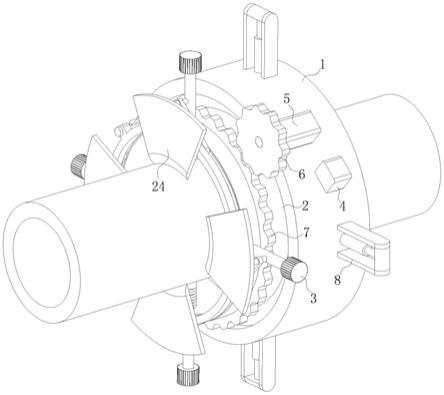
17.图1为本发明的总体结构第一立体视图;
18.图2为本发明的总体结构第二立体视图;
19.图3为本发明的总体结构第三立体视图(不含管道);
20.图4为本发明的总体结构第四立体视图(不含管道);
21.图5为图4中a处结构放大图;
22.图6为本发明的第一转环、第一滑槽与第一滑杆结构示意图;
23.图7为本发明的第一推杆和调节环结构示意图。
24.附图中,各标号所代表的部件列表如下:
25.固定环1、第一转环2、探伤器3、控制器4、第一电机5、第一齿轮6、第一齿圈7、第一滑板8、滚轮9、驱动电机10、调节气缸11、调节板12、第一推杆13、第一滑槽14、第一滑杆15、
调节环16、第一固定块17、紧固板18、第二滑槽19、紧固螺杆20、第一挡盘21、第二挡盘22、第一弹簧23、刮料板24。
具体实施方式
26.请参阅图1-7,本发明提供一种技术方案:一种用于压力管道检测的在线无损探伤仪,包括固定环1,固定环1内部连接有用于驱动固定环1沿管道移动的驱动机构,驱动机构可沿不同直径大小的管道进行移动,固定环1内侧壁上转动连接有第一转环2,第一转环2内部滑动连接有若干呈圆周阵列的探伤器3,探伤器3两两相对布置,且探伤器3包围管道用于对管道进行检测,第一转环2外侧设有用于调节若干探伤器3的调节机构,固定环1外表面上连接有驱动第一转环2转动的转动机构,固定环1外表面上固定连接有控制器4,控制器4用于控制驱动机构和转动机构进行交替动作;
27.转动机构包括第一电机5,第一电机5固定连接在固定环1的外表面上,第一电机5的输出轴端固定连接有第一齿轮6,第一转环2外表面上固定连接有第一齿圈7,第一齿圈7与第一齿轮6相啮合;
28.驱动机构包括四组沿固定环1边缘呈圆周分布阵列的驱动件,每个驱动件均包括有两个第一滑板8,两个第一滑板8均贯穿固定环1并与其滑动连接,两个第一滑板8内侧共同转动连接有滚轮9,滚轮9的转轴端部固定连接有驱动电机10,驱动电机10固定连接在第一滑板8的侧壁上,固定环1的外表面上固定连接有调节气缸11,两个第一滑板8外端共同固定连接有调节板12,调节气缸11外端与调节板12固定连接;
29.当需要对管道进行探伤时,先将固定环1从管道的端头装入包围管道,然后,启动调节气缸11,调节气缸11通过调节板12带动两个第一滑板8向内移动,同步带动滚轮9和驱动电机10向内移动,四周的滚轮9同步将管道夹紧,从而使固定环1和第一转环2与管道同心,有利于对管道四周进行探伤作业,然后,利用调节机构将若干探伤器3调节至离管道外表面合适的检测高度,使得探伤器3内端高于管道外表面,避免探伤器3内端长时间与管道外表面接触磨损,有利于探伤器3的探伤作业,调节机构调节完成后,探伤器3处于管道外侧合适的位置,然后,探伤器3开始工作,进行管道探伤作业,控制器4同步启动第一电机5,关闭驱动电机10,此时,第一电机5在探伤器3工作时,第一电机5驱动第一齿轮6转动,从而带动与第一齿轮6啮合的第一齿圈7转动,带动第一转环2在固定环1内进行转动,使探伤器3沿着管道外表面进行一定范围的探伤,避免处于两个探伤器3之间的管道区域无法被完全探测,能完全对管道进行探伤检测,方便快捷,在探伤器3对管道圆周进行完全探伤后,控制器4控制第一电机5关闭,同时,启动驱动电机10,驱动电机10带动滚轮9转动,滚轮9在管道外表面上滚动,滚轮9压紧在管道外表面上,在滚轮9滚动时,滚轮9通过第一滑板8带动固定环1沿管道自发进行移动,驱动电机10启动设定的时间后,此时,固定环1带动第一转换和探伤器3移动至下个检测位置,探伤器3的移动距离被精准地控制,使得前后两个检测点能被精确控制,保证探伤器3的探伤范围能完全覆盖管道,此时,控制器4控制驱动电机10关闭,启动第一电机5,再次带动探伤器3进行圆周转动,对管道的外表面进行完全探伤,重复以上动作,方便快捷的对长管道进行自动探伤,无需人员参与,配合报警器等机构,在探出裂痕时自动警示,标记裂痕位置,有利于人员及时反馈修复,从而实现在每次对管道进行探伤检测时,利用驱动机构和调节机构进行自适配管道直径大小的检测,驱动机构能满足在不同直
径管道的驱动效果,调节机构能调节探伤器3距离管道外表面的距离,有利于探伤器3对管道内部的裂痕的准确检测,并利用转动机构带动探伤器3进行圆周转动探伤,使得对管道的外表面进行全覆盖式的探伤检测,检测更加准确,利用控制器4交错控制驱动机构和转动机构,自动实现分段间歇式探伤,能自发完全对长管道的全方位的探伤检测,检测结果更加可靠。
30.作为本发明的进一步方案,调节机构包括若干第一推杆13,第一推杆13转动连接在探伤器3外表面上,第一转环2左端开设有第一滑槽14,若干第一推杆13内端均转动连接第一滑杆15,第一滑杆15均滑动连接在第一滑槽14内,若干第一滑杆15外端共同转动连接有调节环16,调节环16位于第一转环2的左侧,调节环16侧壁上连接有用于在调节完成后定位调节环16的定位机构;工作时,由于需要对若干的探伤器3进行同步的距离调节,使探伤器3满足不同大小直径的管道探伤的要求,当需要进行调节时,转动调节环16,调节环16带动第一滑杆15在第一滑槽14内滑动,第一滑杆15推动第一推杆13,第一推杆13同步带动探伤器3,使探伤器3其进行向外或向内的滑动,调节探伤器3与管道外表面的距离,避免探伤器3内端与管道外表面接触,保护探伤器3的内端探头,从而实现对若干探伤器3同步进行高度的调节,有利于探伤器3的探伤。
31.作为本发明的进一步方案,定位机构包括第一固定块17,第一固定块17固定连接在调节环16的外表面上,第一转环2外表面上固定连接有紧固板18,紧固板18内部开合有第二滑槽19,第一固定块17内部螺纹连接有紧固螺杆20,紧固螺杆20右端转动连接有第一挡盘21;工作时,由于在调节环16调节完成后,调节环16可能会自发转动使得调节效果变差,通过在调节完成后,转动紧固螺杆20,紧固螺杆20螺纹连接在第一固定块17内,使得紧固螺杆20向外侧移动,将第一挡盘21拉紧贴靠在紧固板18上,从而将调节环16和第一转环2紧固在一起,避免调节环16自发转动,第二滑槽19用于在调节环16调节时,带动紧固螺杆20在第二滑槽19内滑动,满足调节的特征。
32.作为本发明的进一步方案,每个探伤器3的外表面上均固定连接有第二挡盘22,第二挡盘22位于第一转环2的内侧,每个探伤器3外表面上均套设有位于第二挡盘22和第一转环2之间的第一弹簧23;工作时,由于管道与管道之间可能会存在焊缝,而焊缝的外表面往往大于管道的外表面,而探伤器3为了精准的探测,探伤器3距离管道的外表面会十分接近,在探伤器3探伤经过焊缝时,可能会与焊缝接触,通过在每个探伤器3外侧表三固定的第二挡盘22,在探伤器3经过焊缝时,第二挡盘22先于焊缝接触,使第二挡盘22被抬起,挤压第一弹簧23,第一弹簧23同步带动探伤器3进行向上的移动,提前向外侧移动,避免探伤器3与焊缝接触,保护探伤器3,并可对焊缝的进行探伤,使得探伤更加全面。
33.作为本发明的进一步方案,每个第一推杆13与探伤器3的转动轴端均固定连接有刮料板24,刮料板24右侧壁与调节环16向接触,若干刮料板24用于对管道外表面进行清洁;工作时,由于管道的外表面上可能会遗留有锈迹或者费屑等,容易影响探伤器3的探伤,通过利用刮料板24,在第一转环2移动和转动时,将管道外表面进行刮动清洁,取出管道外表面上的铁锈和费屑,并且在刮料板24跟对第一推杆13进行自动扩张或者缩小,适配与不同直径大小的管道清洁,有利于探伤器3的自动探伤。
34.工作原理:当需要对管道进行探伤时,先将固定环1从管道的端头装入包围管道,然后,启动调节气缸11,调节气缸11通过调节板12带动两个第一滑板8向内移动,同步带动
滚轮9和驱动电机10向内移动,四周的滚轮9同步将管道夹紧,从而使固定环1和第一转环2与管道同心,有利于对管道四周进行探伤作业,然后,利用调节机构将若干探伤器3调节至离管道外表面合适的检测高度,使得探伤器3内端高于管道外表面,避免探伤器3内端长时间与管道外表面接触磨损,有利于探伤器3的探伤作业,调节机构调节完成后,探伤器3处于管道外侧合适的位置,然后,探伤器3开始工作,进行管道探伤作业,控制器4同步启动第一电机5,关闭驱动电机10,此时,第一电机5在探伤器3工作时,第一电机5驱动第一齿轮6转动,从而带动与第一齿轮6啮合的第一齿圈7转动,带动第一转环2在固定环1内进行转动,使探伤器3沿着管道外表面进行一定范围的探伤,避免处于两个探伤器3之间的管道区域无法被完全探测,能完全对管道进行探伤检测,方便快捷,在探伤器3对管道圆周进行完全探伤后,控制器4控制第一电机5关闭,同时,启动驱动电机10,驱动电机10带动滚轮9转动,滚轮9在管道外表面上滚动,滚轮9压紧在管道外表面上,在滚轮9滚动时,滚轮9通过第一滑板8带动固定环1沿管道自发进行移动,驱动电机10启动设定的时间后,此时,固定环1带动第一转换和探伤器3移动至下个检测位置,探伤器3的移动距离被精准地控制,使得前后两个检测点能被精确控制,保证探伤器3的探伤范围能完全覆盖管道,此时,控制器4控制驱动电机10关闭,启动第一电机5,再次带动探伤器3进行圆周转动,对管道的外表面进行完全探伤,重复以上动作,方便快捷的对长管道进行自动探伤,无需人员参与,配合报警器等机构,在探出裂痕时自动警示,标记裂痕位置,有利于人员及时反馈修复,从而实现在每次对管道进行探伤检测时,利用驱动机构和调节机构进行自适配管道直径大小的检测,驱动机构能满足在不同直径管道的驱动效果,调节机构能调节探伤器3距离管道外表面的距离,有利于探伤器3对管道内部的裂痕的准确检测,并利用转动机构带动探伤器3进行圆周转动探伤,使得对管道的外表面进行全覆盖式的探伤检测,检测更加准确,利用控制器4交错控制驱动机构和转动机构,自动实现分段间歇式探伤,能自发完全对长管道的全方位的探伤检测,检测结果更加可靠。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1