一种表面成像方法、存储介质及设备与流程
本申请涉及计算机,尤其涉及一种表面成像方法、存储介质及设备。
背景技术:
1、在物体轮廓扫描、人脸识别等领域都有用到条纹相位测量轮廓术来获取物体轮廓,需要采用投影仪向物体投射条纹,再用相机获取条纹图像来计算出轮廓。投影仪的镜头的旋转角度会影响光栅条纹的条纹对比度,尤其是在相机的分辨率远高于投影仪分辨率的情况下,会导致相机所获取到的光栅条纹的图像存在较多噪声和坏点,导致计算出来的物体轮廓不准确、不清晰。
技术实现思路
1、本申请实施例提供了一种表面成像方法、存储介质及设备,可以获取拥有最小方差的相位误差分布所对应的期望旋转角,以期望旋转角投射的光栅条纹的条纹对比度更高,摄像组件获取到的图像中的噪声和坏点更少,从而使得获取到的物体表面成像的清晰度、准确度更高。所述技术方案如下:
2、第一方面,本申请实施例提供了一种表面成像方法,用于成像设备中,所述成像设备包括投影组件和摄像组件,所述方法包括:
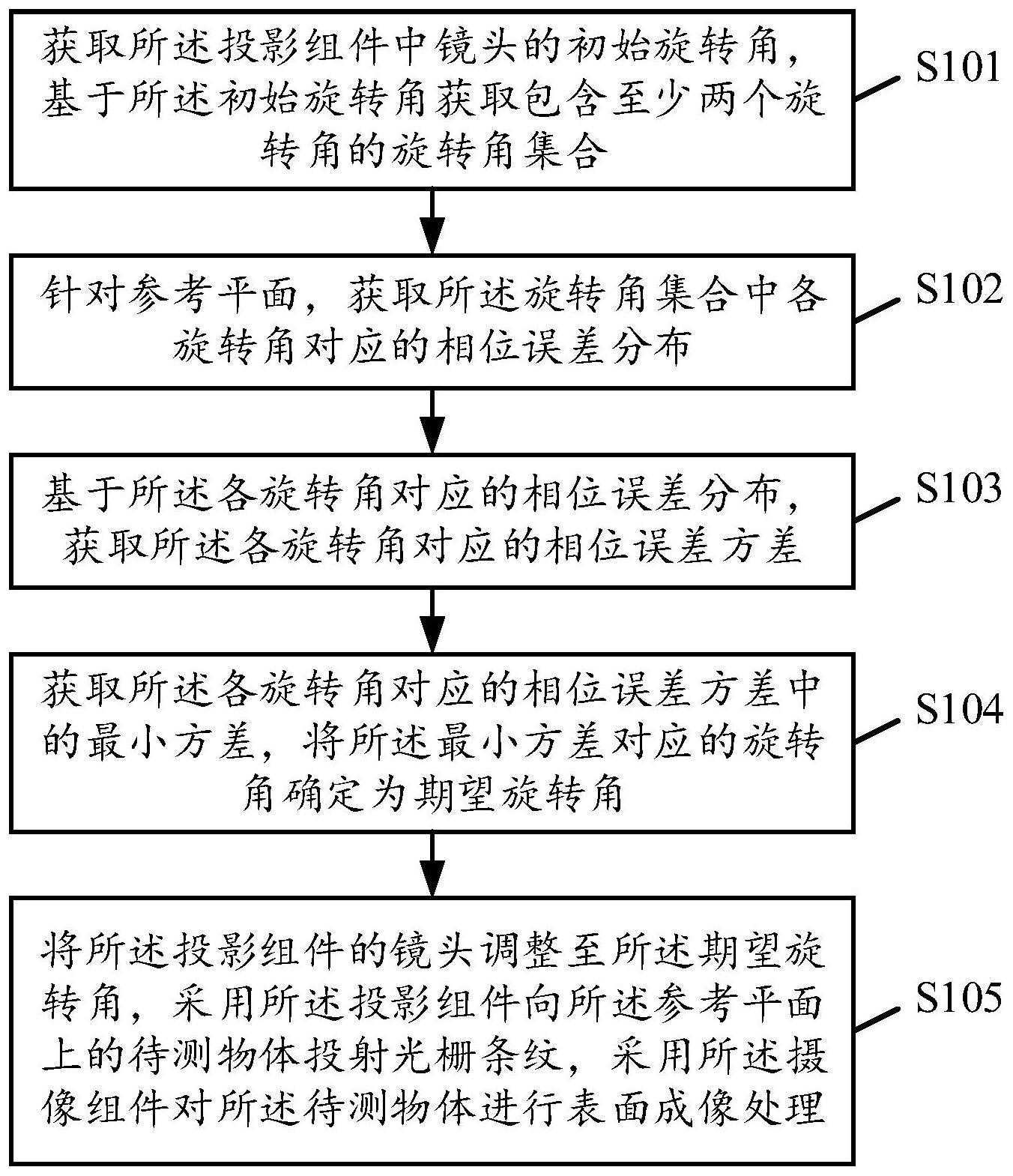
3、获取所述投影组件中镜头的初始旋转角,基于所述初始旋转角获取包含至少两个旋转角的旋转角集合;
4、针对参考平面,获取所述旋转角集合中各旋转角对应的相位误差分布;
5、基于所述各旋转角对应的相位误差分布,获取所述各旋转角对应的相位误差方差;
6、获取所述各旋转角对应的相位误差方差中的最小方差,将所述最小方差对应的旋转角确定为期望旋转角;
7、将所述投影组件的镜头调整至所述期望旋转角,采用所述投影组件向所述参考平面上的待测物体投射光栅条纹,采用所述摄像组件对所述待测物体进行表面成像处理。
8、第二方面,本申请实施例提供了一种成像设备,所述成像设备包括:投影组件、摄像组件和处理器;其中,
9、所述处理器的一端和所述投影组件相连接,所述处理器的另一端和所述摄像组件相连接;
10、所述投影组件将镜头的初始旋转角发送至所述处理器;
11、所述处理器基于所述初始旋转角获取包含至少两个旋转角的旋转角集合;
12、所述处理器针对参考平面,获取所述旋转角集合中各旋转角对应的相位误差分布;
13、所述处理器基于所述各旋转角对应的相位误差分布,获取所述各旋转角对应的相位误差方差;
14、所述处理器获取所述各旋转角对应的相位误差方差中的最小方差,将所述最小方差对应的旋转角确定为期望旋转角,基于所述期望旋转角生成第一指令;
15、所述处理器向所述投影组件发送所述第一指令,所述投影组件基于所述第一指令将所述镜头调整至所述期望旋转角,向所述参考平面上的待测物体投射光栅条纹;
16、所述处理器向所述摄像组件发送第二指令,所述摄像组件基于所述第二指令采集所述待测物体的条纹图像,所述摄像组件将所述条纹图像发送至所述处理器,所述处理器基于所述条纹图像对所述待测物体进行表面成像处理。
17、第三方面,本申请实施例提供一种计算机存储介质,所述计算机存储介质存储有多条指令,所述指令适于由处理器加载并执行上述的方法步骤。
18、第四方面,本申请实施例提供一种电子设备,可包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序适于由所述处理器加载并执行上述的方法步骤。
19、本申请一些实施例提供的技术方案带来的有益效果至少包括:
20、在本申请一个或多个实施例中,基于投影组件中镜头的初始旋转角获取旋转角集合,针对参考平面获取旋转角集合中各旋转角对应的相位误差分布和各旋转角对应的相位误差方差,获取各旋转角对应的相位误差方差中的最小方差,将最小方差对应的旋转角确定为期望旋转角,将投影组件的镜头调整至期望旋转角,采用投影组件向参考平面上的待测物体投射光栅条纹,采用摄像组件对待测物体进行表面成像处理。通过获取拥有最小方差的相位误差分布所对应的期望旋转角,以期望旋转角投射的光栅条纹的条纹对比度更高,摄像组件获取到的图像中的噪声和坏点更少,从而使得获取到的物体表面成像的清晰度、准确度更高。
技术特征:
1.一种表面成像方法,应用于成像设备中,所述成像设备包括投影组件和摄像组件,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取所述投影组件中镜头的初始旋转角,基于所述初始旋转角获取包含至少两个旋转角的旋转角集合,包括:
3.根据权利要求1所述的方法,其特征在于,所述针对参考平面,获取所述旋转角集合中各旋转角对应的相位误差分布,包括:
4.根据权利要求3所述的方法,其特征在于,所述针对参考平面,获取所述旋转角集合中的目标旋转角对应的目标参考相位分布,包括:
5.根据权利要求3所述的方法,其特征在于,所述对所述目标参考相位分布进行曲面拟合获取目标期望相位分布,包括:
6.根据权利要求3所述的方法,其特征在于,所述基于所述各旋转角对应的相位误差分布,获取所述各旋转角对应的相位误差方差,包括:
7.根据权利要求所述1的方法,其特征在于,所述获取所述各旋转角对应的相位误差方差中的最小方差,将所述最小方差对应的旋转角确定为期望旋转角,包括:
8.一种成像设备,其特征在于,所述成像设备包括:投影组件、摄像组件和处理器;其中,
9.一种计算机存储介质,其特征在于,所述计算机存储介质存储有多条指令,所述指令适于由处理器加载并执行如权利要求1~7任意一项的方法步骤。
10.一种电子设备,其特征在于,包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序适于由所述处理器加载并执行如权利要求1~7任意一项的方法步骤。
技术总结
本申请公开了一种表面成像方法、存储介质及设备,其中,方法包括:获取投影组件中镜头的初始旋转角,基于初始旋转角获取包含至少两个旋转角的旋转角集合,针对参考平面,获取旋转角集合中各旋转角对应的相位误差分布,基于各旋转角对应的相位误差分布,获取各旋转角对应的相位误差方差,获取各旋转角对应的相位误差方差中的最小方差,将最小方差对应的旋转角确定为期望旋转角,将投影组件的镜头调整至期望旋转角,采用投影组件向参考平面上的待测物体投射光栅条纹,采用摄像组件对待测物体进行表面成像处理。采用本申请,摄像组件获取到的图像中的噪声和坏点更少,从而使得获取到的物体表面成像的清晰度、准确度更高。
技术研发人员:李玉鹏,伍俊龙
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!