基于RTK定位X光输电线路缺陷检测设备X光摄像成像装置的制作方法
基于rtk定位x光输电线路缺陷检测设备x光摄像成像装置
技术领域
1.本发明涉及输电线路带电缺陷检测技术领域,尤其涉及基于rtk定位x光输电线路缺陷检测设备x光摄像成像装置。
背景技术:
2.为了能够全力保障电网的安全可靠运行,尽可能减少输配电设备临时停电次数,最大程度的限制故障停电时间,电网企业中的各生产专业都已开发完善了带电作业检修技术和临时应急抢修的条件。通过对近十年输配电带电作业类型、次数的统计与分析,带电作业各项操作次数逐年上升,带电作业已经成为电网公司的一个常规作业方式。
3.目前,随着用电设备的高速发展,电网运检任务愈加艰难,在电网架设中,在耐张杆塔或导地线接头处,通常使用液压式耐张线夹或导地线接续管进行连接,由于工艺复杂,施工后缺陷隐蔽性强,容易导致导地线断裂、脱落,造成不可挽回的重大损失,所以耐张线夹和导地线接续管的x光无损探伤缺陷检测,成为了避免事故的主要手段。
4.目前,x光无损探伤缺陷检测作业中,x光摄像成像需要将检测的线路停电,然后作业人员携带x光成像板,爬塔登高,需在线路停电时作业,并作业时间长,不适宜大规模检测,检测效率低下,极易发生人身伤亡事故。
技术实现要素:
5.本发明所要解决的技术问题是提供了一种基于rtk定位x光输电线路缺陷检测设备x光摄像成像装置。被检测的线路无需停电,无需作业人员爬塔登高,便可完成x光摄像成像,无人员接触线路,操作方便,人员与设备安全性高。
6.为实现上述目的,本发明采用以下技术方案实现:
7.基于rtk定位x光输电线路缺陷检测设备x光摄像成像装置,包括上部挂架、横向移动装置、竖向移动装置、下部平衡架、抱臂、抱臂驱动电机与成像板;所述上部挂架与下部平衡架固接在竖向移动装置上下两端,横向移动装置、抱臂与竖向移动装置相连,竖向移动装置带动横向移动装置与抱臂竖向移动,成像板与横向移动装置相连,横向移动装置带动成像板横向移动;抱臂驱动电机与抱臂相连,带动抱臂张开与抱紧。
8.所述横向移动装置包括丝杆、丝母与横向移动电机,丝杆安装在丝杆座上,丝杆座固接在竖向移动装置上,丝母与丝杆啮合,成像板固接在丝母上;横向移动电机与丝杆相连,并带动其旋转,带动丝母与成像板横向移动。
9.所述竖向移动装置包括矩形框架、竖向移动电机、竖向丝杆与竖向丝母;上部挂架通过上部连接件与矩形框架相连,下部平衡架通过下部连接件与矩形框架相连;竖向丝杆安装在矩形框架上,竖向丝杆与竖向丝母啮合,抱臂与横向移动装置固接在竖向丝母上;竖向移动电机与竖向丝杆相连,并带动其旋转,进而带动抱臂与横向移动装置竖向移动。
10.所述抱臂包括长臂、卡臂与支座;抱臂驱动电机固接在支座上,抱臂驱动电机通过蜗轮蜗杆与长臂、卡臂相连,并带动长臂、卡臂旋转,实现张开与抱紧。所述长臂之间通过连
杆相连。
11.还包括机械手装置、负载快拆挂载装置与无人机,机械手装置通过负载快拆挂载装置与无人机相连,机械手装置抓起上部挂架。
12.所述机械手装置包括臂架、第一电机、第二电机、第一机械爪、第二机械爪与负载快拆挂载装置;臂架通过负载快拆挂载装置与无人机相连;第一电机固接在臂架上,第一电机与第一机械爪相连,第二电机固接在臂架上,第二电机与第二机械爪相连;第一电机带动第一机械爪正反向旋转,第二电机带动第二机械爪正反向旋转,进而实现机械爪的开启与闭合。
13.所述负载快拆挂载装置包括矩形箱体、固定机构、挂载板与连接杆;矩形箱体固接在无人机底部,械手装置固接在挂载板上,固定机构分别固接在矩形箱体与挂载板上,挂载板与矩形箱体通过固定机构与连接杆相连;矩形箱体内部设有加强筋板,矩形箱体底部设有加强杆,加强杆以可拆卸方式固接在矩形箱体底部,加强杆与连接杆相互垂直。
14.所述固定机构包括固定座与固定环,固定座顶部设有半圆弧形凹槽,固定环为半圆弧形,一端铰接在固定座顶部,通过旋转实现开启与闭合,闭合后通过螺栓锁定。
15.所述矩形箱体的侧面为开口,开口处设有弹簧旋挡组件,弹簧旋挡组件包括弹簧、弹簧轴、挡块与卡块;弹簧安装在弹簧轴上,挡块铰接在弹簧轴上,挡块绕弹簧轴旋转,旋转后通过弹簧与卡块卡固定位。
16.与现有的技术相比,本发明的有益效果是:
17.1)本发明机械手装置通过负载快拆挂载装置与无人机相连,无人机带动机械手装置升空,机械手装置抓起成像板,无人机携带机械手装置运送成像板至被检测位置,抱臂驱动电机带动抱臂张开与抱紧,进而将成像板固定在电线上;检测完成后,无人机携带机械手装置运送成像板至地面。
18.进行缺陷检测时,被检测的线路无需停电,即可进行缺陷检测,保障了线路输电的连续性。使用rtk技术对无人机的飞行进行辅助,避免了因线路强电磁干扰对无人机造成的安全隐患。使用无人机携带机械手装置运输x光摄像成像装置,无人员接触线路,操作方便,人员与设备安全性高。到达现场后3分钟内即可组装调试好设备开始作业,单线夹作业时间在10分钟内完成,较人工爬塔作业的30分钟以上速度快了三倍,并可以杜绝人员危险,还能检测带电线路,整体缺陷检测效率是人工检测的几十倍。
19.2)本发明通过抱臂抱紧而固接在电线上,挂载到电线上后需要取得目标左右两侧的图像时,通过横向移动装置带动成像板左右移动,需要取得目标上下不在成像范围内的图像时,通过竖向移动装置带动成像板上下移动,进而增强了装置使用效果。
20.3)本发明设有负载快拆挂载装置,实现了将机械手装置快速固定在旋翼无人机上,并且快速拆卸;负载快拆挂载装置设有矩形箱体,矩形箱体内部设有加强筋板,矩形箱体底部设有加强杆,承重大;矩形箱体的侧面为开口,便于放入旋翼无人机电池,开口处设有弹簧旋挡组件,能够挡住无人机电池,避免电池滑出箱体。
附图说明
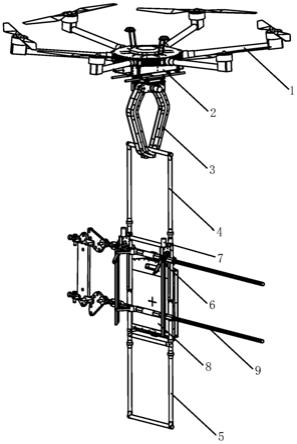
21.图1为本发明立体结构示意图;
22.图2为本发明x光摄像成像部分立体结构示意图;
23.图3为本发明x光摄像成像部分另一角度立体结构示意图;
24.图4为本发明x光摄像成像部分结构示意侧视图;
25.图5为本发明负载快拆挂载装置立体结构示意图;
26.图6为本发明机械手装置及挂载板立体结构示意图;
27.图7为本发明负载快拆挂载装置立体结构示意图(不包括挂载板);
28.图8为本发明固定机构立体结构示意图。
29.图中:1-无人机2-负载快拆挂载装置3-机械手装置4-上部挂架5-下部平衡架6-抱臂7-抱臂驱动电机8-成像板9-电线10-竖向移动电机11-丝杆12-丝母13-横向移动电机14-矩形框架21-矩形箱体22-固定机构23-挂载板24-连接杆25-弹簧26-弹簧轴27-挡块28-卡块211-加强筋板212-加强杆221-固定座222-30.固定环223-手拧螺丝31-臂架32-第一电机33-第二电机34-第一机械爪35-第二机械爪61-长臂62-卡臂63-支座
具体实施方式
31.下面结合附图对本发明的具体实施方式进一步说明:
32.如图1~8所示,基于rtk定位x光输电线路缺陷检测设备x光摄像成像装置,包括无人机1、负载快拆挂载装置2、机械手装置3、上部挂架4、横向移动装置、竖向移动装置、下部平衡架5、抱臂6、抱臂驱动电机7与成像板8。
33.无人机1为现有技术,采用6旋翼无人机,并且采用带有rtk系统的无人机,通过rtk系统定位。
34.负载快拆挂载装置2包括矩形箱体21、固定机构22、挂载板23与连接杆24。矩形箱体21为扁长方体箱体结构,左右两个侧面为开口。矩形箱体21内部中间设有纵向加强筋板211,矩形箱体21底部设有加强杆212,两个加强杆212相互平行,横向通过座以及螺栓以可拆卸方式固接在矩形箱体21底部,加强杆212与连接杆24相互垂直。
35.侧面开口处设有弹簧旋挡组件,弹簧旋挡组件包括弹簧25、弹簧轴26、挡块27与卡块28。卡块28设有凹槽,挡块27设有与卡块28凹槽相应的凸起,弹簧25与挡块27依次安装在弹簧轴26上,挡块27绕弹簧轴26旋转,旋转后通过卡块28与弹簧25卡固定位。
36.矩形箱体21左右两个侧面为开口,便于将旋翼无人机电池放置在矩形箱体21内,挡块27绕弹簧轴26旋转,旋转后通过卡块28与弹簧25卡固定位,通过挡块27能够挡住电池,避免电池滑出矩形箱体21。
37.固定机构22包括固定座221与固定环222,固定座222顶部设有半圆弧形凹槽,固定环222为半圆弧形,一端铰接在固定座221顶部,通过旋转实现开启与闭合,开启后便可将连接杆24放入凹槽内,闭合后通过高头滚花手拧螺丝223锁定,将固定机构22与连接杆24固定在一起。拆卸时拧下高头滚花手拧螺丝223,旋转实现开启固定环222,便可实现快速拆卸。
38.四个固定机构22的固定座221固接在矩形箱体21底面的四角,四个固定机构22的固定座221固接在挂载板23顶面四角。矩形箱体21顶面固接在6旋翼无人机1上,挂载板23固接在机械手装置3上,矩形箱体21一侧的两个固定机构22与挂载板23一侧的两个固定机构22均固接在一个连接杆24上,矩形箱体21另一侧的两个固定机构22与挂载板23另一侧的两个固定机构22均固接在一个连接杆24上,进而实现机械手装置3与旋翼无人机1的连接。
39.机械手装置3包括臂架31、第一电机32、第二电机33、第一机械爪34与第二机械爪35。臂架31固接在挂载板23底面,第一电机32固接在臂架31上,第一电机32与第一机械爪34相连,第二电机33固接在臂架31上,第二电机33与第二机械爪35相连。第一电机32带动第一机械爪34正反向旋转,第二电机33带动第二机械爪35正反向旋转,进而实现机械爪的开启与闭合。
40.成像板8为现有产品,采用x射线成像板。竖向移动装置包括矩形框架14、竖向移动电机10、竖向丝杆与竖向丝母,竖向丝杆安装在矩形框架14的竖向圆筒内,竖向丝杆与竖向丝母啮合,竖向移动电机10与竖向丝杆相连,并带动其旋转,进而带动竖向丝母上下移动。横向移动装置与抱臂6固接在竖向丝母上,进而带动横向移动装置与抱臂6上下移动。
41.上部挂架4通过连接件以可拆卸方式固接在矩形框架14顶部,下部平衡架5通过连接件以可拆卸方式固接在矩形框架14底部。
42.横向移动装置包括丝杆11、丝母12与横向移动电机13,丝杆11安装在丝杆座上,丝杆座固接在竖向丝母上,丝母12与丝杆11啮合,成像板8固接在丝母12上。横向移动电机13与丝杆11相连,并带动其旋转,进而带动丝母12以及与之相连的成像板8左右移动。
43.抱臂6包括长臂61、卡臂62与支座63,两个长臂61之间通过连杆连接,抱臂驱动电机7固接在支座63上,抱臂驱动电机7与长臂61、卡臂62相连,并带动长臂61、卡臂62旋转,实现张开与抱紧。支座63固接在竖向丝母上,能上下移动调整位置。
44.工作时,机械手装置3通过负载快拆挂载装置2与无人机1快速连接,无人机1带动机械手装置3升空,机械手装置3抓取上部挂架4顶部的横梁,进而带动成像板8升空。到达待检测位置后通过抱臂6抱紧而固接在电线9上。挂载到电线上后需要取得目标左右两侧的图像时,通过横向移动装置带动成像板8左右移动,可左右各移动15厘米,需要取得目标上下不在成像范围内的图像时,通过竖向移动装置带动成像板8上下移动,可上下各移动15厘米,增强装置使用效果。
45.本发明设有负载快拆挂载装置2,实现了将机械手装置3快速固定在旋翼无人机1上,并且快速拆卸。负载快拆挂载装置2设有矩形箱体21,矩形箱体21内部设有加强筋板211,矩形箱体21底部设有加强杆212,承重大;矩形箱体21的侧面为开口,便于放入旋翼无人机电池,开口处设有弹簧旋挡组件,能够挡住无人机电池,避免电池滑出箱体。
46.本发明通过抱臂6抱紧而固接在电线9上,挂载到电线9上后需要取得目标左右两侧的图像时,通过横向移动装置带动成像板左右移动,需要取得目标上下不在成像范围内的图像时,通过竖向移动装置带动成像板上下移动,进而增强了装置使用效果。
47.使用本发明进行缺陷检测时,被检测的线路无需停电,即可进行缺陷检测,保障了线路输电的连续性。本发明使用rtk技术对无人机的飞行进行辅助,避免了因线路强电磁干扰对无人机造成的安全隐患。使用无人机携带机械手装置运输x光摄像成像装置,无人员接触线路,操作方便,人员与设备安全性高。到达现场后3分钟内即可组装调试好设备开始作业,单线夹作业时间在10分钟内完成,较人工爬塔作业的30分钟以上速度快了三倍,并可以杜绝人员危险,还能检测带电线路,整体缺陷检测效率是人工检测的几十倍。
48.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1