一种基于微纳波导倏逝场耦合的单片式光学MEMS加速度计
一种基于微纳波导倏逝场耦合的单片式光学mems加速度计
技术领域
1.本发明属于微机电系统和微惯性器件技术领域,具体涉及一种基于微纳波导倏逝场耦合的单片式光学mems加速度计。
背景技术:
2.受益于体积小、成本低等特点,mems加速度计被广泛应用于航空航天、民用消费、汽车导航等多个领域。目前,传统的mems加速度计主要以压阻式和电容式为主。压阻式mems加速度计利用半导体的压阻效应实现加速度的检测。受原理限制,此类加速度计灵敏度较低,通常用于中低精度测量应用。电容式加速度计基本原理为质量块与固定结构之间极板间距的改变引起加速度计输出电容的变化。此类加速度计,具有功耗小、灵敏度高的优点,但是易受到外界电磁干扰,且受限于寄生电容影响,灵敏度等性能受限。除此之外,电容式加速度计基于双层极板结构,要求极板间严格的装配参数。综上所述,目前传统基于压阻效应、电容效应等电学原理的mems加速度计,面临灵敏度难以进一步提高、易受电磁干扰、装配难度大等挑战。
技术实现要素:
3.针对上述目前mems加速度计检测灵敏度低、抗电磁干扰能力差、装配难度大的问题,本发明提供了一种基于微纳波导倏逝场耦合的单片式光学mems加速度计,基于硅纳米线倏逝场效应,实现不同硅纳米线间的光学能量转移。利用不同耦合结构参数下,纳米线耦合效率不同的特点,将加速度引起的质量块位移转变为不同硅纳米线间重叠长度改变量,最终通过检测输出端纳米线输出功率实现对加速度的检测。本发明基于光学原理,通过检测波导中光功率变化实现加速度检测,具有免疫电磁干扰和外界环境光干扰的特点。
4.为了解决上述技术问题,本发明采用的技术方案为:
5.一种基于微纳波导倏逝场耦合的单片式光学mems加速度计,包括输入硅纳米线、弯曲硅纳米线、输出硅纳米线、质量块、悬臂梁、支撑结构,所述弯曲硅纳米线固定在质量块上,所述弯曲硅纳米线的一端与输入硅纳米线耦合,所述弯曲硅纳米线的另一端与输出硅纳米线耦合,所述质量块通过悬臂梁与支撑结构连接,所述输入硅纳米线、弯曲硅纳米线均固定在支撑结构上;所述输入硅纳米线的端面输入泵浦光,所述泵浦光耦合入输入硅纳米线中以导波方式传输,然后通过倏逝场耦合的方式导波能量从输入硅纳米线耦合入位于质量块上的弯曲硅纳米线中,在弯曲硅纳米线中传输一段距离后,同样经由倏逝场耦合入输出硅纳米线中,当输入加速度量,所述质量块与支撑结构发生相对位移,带动弯曲硅纳米线相对输入硅纳米线、输出硅纳米线发生轴向位移,弯曲硅纳米线和输出硅纳米线的位移引发重叠长度改变,从而导致耦合效率变化,通过检测输出硅纳米线输出光功率变化推算出弯曲硅纳米线位移量,进而计算出输入加速度量大小。
6.所述输入硅纳米线的一侧设置有半导体激光器,所述输入硅纳米线与半导体激光器之间设置有透镜,所述输出硅纳米线的一侧设置有光电探测器。
7.所述泵浦光的中心波长范围为1100nm至2200nm,所述泵浦光的光谱半高宽小于10nm。
8.所述泵浦光输入输入硅纳米线的耦合方式采用光栅衍射耦合、透镜聚焦或端面对准直接耦合,所述泵浦光输入输入硅纳米线的耦合效率》50%。
9.所述悬臂梁采用t形梁结构或蛇形弹簧结构,所述质量块、悬臂梁、支撑结构的材料均采用si。
10.所述输入硅纳米线、弯曲硅纳米线、输出硅纳米线的截面面积小于(1/20)λ2,所述λ为泵浦光的中心波长,所述弯曲硅纳米线与输入硅纳米线、输出硅纳米线的间距小于(1/3)λ。
11.所述输入硅纳米线与弯曲硅纳米线的重叠长度为单个耦合周期的整数倍。
12.所述质量块上弯曲硅纳米线的半径大于50μm。
13.本发明与现有技术相比,具有的有益效果是:
14.本发明利用纳米线间耦合效率随重叠长度呈正弦变化的特性,通过检测纳米线输出光功率检测质量块位移量,从而推算输入加速度量。本发明基于光学原理,通过检测波导中光功率变化实现加速度检测,具有免疫电磁干扰和外界环境光干扰的特点;根据微纳波导倏逝场耦合原理,极其微小的位移将会引起耦合效率的剧烈变化,具有很高的测量灵敏度。
附图说明
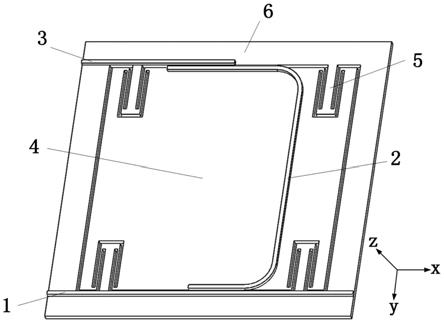
15.图1为本发明的结构示意图;
16.图2为本发明的另一结构示意图;
17.图3为本发明的耦合区域放大图;
18.图4为本发明的机械灵敏度图;
19.图5为本发明的硅纳米线倏逝场耦合的光强分布图;
20.图6为本发明的耦合效率随硅纳米线重叠长度的函数变化关系图
21.其中:1为输入硅纳米线,2为弯曲硅纳米线,3为输出硅纳米线,4为质量块,5为悬臂梁,6为支撑结构,7为半导体激光器,8为透镜,9为光电探测器。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
24.一种基于微纳波导倏逝场耦合的单片式光学mems加速度计,如图1所示,包括输入
硅纳米线1、弯曲硅纳米线2、输出硅纳米线3、质量块4、悬臂梁5、支撑结构6,弯曲硅纳米线2固定在质量块4上,弯曲硅纳米线2的一端与输入硅纳米线1耦合,弯曲硅纳米线2的另一端与输出硅纳米线3耦合,质量块4通过悬臂梁5与支撑结构6连接,输入硅纳米线1、弯曲硅纳米线2均固定在支撑结构6上;输入硅纳米线1的端面输入泵浦光,泵浦光耦合入输入硅纳米线1中以导波方式传输,然后通过倏逝场耦合的方式导波能量从输入硅纳米线1耦合入位于质量块4上的弯曲硅纳米线2中,在弯曲硅纳米线2中传输一段距离后,同样经由倏逝场耦合入输出硅纳米线3中,当输入加速度量,质量块4与支撑结构6发生相对位移,带动弯曲硅纳米线2相对输入硅纳米线1、输出硅纳米线3发生轴向位移,弯曲硅纳米线2和输出硅纳米线3的位移引发重叠长度改变,从而导致耦合效率变化,通过检测输出硅纳米线3输出光功率变化推算出弯曲硅纳米线2位移量,进而计算出输入加速度量大小。
25.进一步,如图2所示,输入硅纳米线1的一侧设置有半导体激光器7,输入硅纳米线1与半导体激光器7之间设置有透镜8,输出硅纳米线3的一侧设置有光电探测器9。
26.进一步,泵浦光的中心波长范围为1100nm至2200nm,泵浦光的光谱半高宽小于10nm。
27.进一步,泵浦光输入输入硅纳米线1的耦合方式采用光栅衍射耦合、透镜聚焦或端面对准直接耦合,泵浦光输入输入硅纳米线1的耦合效率》50%。
28.进一步,悬臂梁5采用t形梁结构或蛇形弹簧结构,质量块4、悬臂梁5、支撑结构6的材料均采用si。
29.进一步,为了确保平行微纳波导近场耦合区域的光强能呈周期性分布,输入硅纳米线1、弯曲硅纳米线2、输出硅纳米线3的截面面积小于(1/20)λ2,λ为泵浦光的中心波长,弯曲硅纳米线2与输入硅纳米线1、输出硅纳米线3的间距小于(1/3)λ。
30.进一步,输入硅纳米线1与弯曲硅纳米线2的重叠长度为单个耦合周期的整数倍。
31.进一步,为避免信号光在质量块上以导波形式传输时发生损耗,质量块4上弯曲硅纳米线2的半径大于50μm。
32.本发明的工作原理为:
33.其中,加速度计信号光光源采用透镜端面耦合的方式耦合输入硅纳米线1;
34.其中,为保证较大的倏逝场范围,以实现高效率光学耦合,输入硅纳米线1、弯曲硅纳米线2、输出硅纳米线3的典型截面尺寸小于1/2信号光波长;
35.其中,入射光在输入纳米线1中传输,在输入硅纳米线1与弯曲纳米线2的重叠区域通过倏逝耦合的方式进行能量交换。无论外界是否有加速度输入,输入硅纳米线1与弯曲硅纳米线2的重叠长度始终不变,因此纳米线1至纳米线2的耦合效率为定值。
36.其中,入射光在输入硅纳米线1中传输,在输入硅纳米线1与弯曲纳米线2的重叠区域通过倏逝耦合的方式进行能量交换。无论外界是否有加速度输入,输入硅纳米线1与弯曲硅纳米线2的重叠长度始终不变,因此输入纳米线1至纳米线2的耦合效率为定值。
37.其中,质量块4采用悬臂梁5与支撑结构6相连接。当外界向加速度计施加一定加速度值,质量块4与支撑结构6发生相对位移,二者可以视为一个二阶质量阻尼弹簧系统。质量块4在检测方向上的相对位移x与施加加速度a的关系可以用二阶微分方程(1)来描述。
38.39.m是聚集在质量块4上的有效质量,c为阻尼系数,k是检测梁5的弹性系数。当惯性场的加速度为近似常量时,即工作频率远远小于固有频率时,相对位移量x与加速度a呈近似线性关系。
40.通过建立施加加速度与质量块的相对位移之间的联系,考虑通过检测相对位移量间接检测输入加速度,并定义加速度检测主体的机械灵敏度为单位加速度能产生的相对位移量,用s1表示,单位为μm/g。
41.其中,当施加一定加速度,质量块4与支撑结构6发生相对位移,带动位移质量块4上的弯曲纳米线2相对纳米线3发生轴向位移。令纳米线2与纳米线3的初始重叠长度(此时输入加速度大小为零)为l
in
,如图3(b)所示,质量块产生的相对位移为δx,那么纳米线2与纳米线3的重叠长度l
out
满足(2)式,如图3(c)所示。
42.l
out
=l
in
+x
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
43.光在弯曲硅纳米线2中传输时,一部分能量以倏逝波的形式进行传输,与相平行的输出纳米线3在耦合区域进行能量交换。如图5所示,耦合区域的光强呈周期性分布。随着输出纳米线3与弯曲纳米线2的重叠长度发生变化,纳米线3的输出光功率也发生变化。如图6所示,输出功率随重叠长度增加呈正弦振荡变化规律。因此,通过检测纳米线3的输出光功率就能测得耦合区域的重叠长度l
out
,在初始重叠长度l
in
已知的条件下,可以推算出质量块4产生的相对位移x。
44.其中,定义光学灵敏度为利用微纳波导近场光学耦合特性测得的位移量δx与耦合区域输出的光功率的比值,用符号s2表示,单位为w/μm。
45.综上所述,向加速度计施加一定量的加速度,通过检测系统输出端的输出光功率,可以推算出输入加速度量。系统总灵敏度s为机械灵敏度与光学灵敏度的乘积,单位为w/g。
46.s=s1×
s2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
47.具体实施方式参数如下:
48.泵浦光源参数:中心波长1550nm,功率10mw;
49.加速度计检测主体结构:soi,其中顶层硅厚220nm,氧化层为sio2材料,厚度为3μm,底层硅厚100μm;
50.质量块表面积:4000μm
×
4000μm,
51.悬臂梁尺寸:长1400μm,宽20μm;
52.平行于x轴向间隙宽度:100nm,
53.平行于y轴向间隙宽度:50μm,
54.硅纳米线截面面积:300nm
×
220nm,
55.弯曲硅纳米线弯曲半径:50μm,
56.输入端波导重叠长度:2.42μm,
57.输出端波导初始重叠长度l
in
:3.625μm,
58.光电探测器参数:转换灵敏度2
×
105v/w,分辨率20nw。
59.中心波长为1550nm的泵浦光经过一片光学透镜,被聚焦在纳米线1的端面,进而耦合入纳米线1中在其中以导波形式传输,耦合效率为60%。
60.输入硅纳米线1、弯曲硅纳米线2、输出硅纳米线3的截面均为宽300nm高220nm的矩形。间距100nm,重叠长度为10μm的两根纳米线在1550nm波长下的耦合情况如图5所示。设计
输入硅纳米线1与弯曲硅纳米线2重叠区域长度为2.42μm,由图5可知,此时输出波导输出端面的光强最强;由图6可知,耦合效率为69%。经过弯曲硅纳米线2中的传输,信号光在弯曲硅纳米线2、输出硅纳米线3的重叠区域再次发生倏逝场耦合。耦合进入输出硅纳米线3的光能量在经过传输后被探测器检测。
61.在案例结构参数下,仿真计算可得机械灵敏度s1=0.1μm/g,光学灵敏度s2=0.95mw/μm。其中,如图4所示,沿x轴方向向加速度计施加-10g至+10g步长为2g的加速度,质量块4在加速度作用下相对支撑结构6发生位移,产生相对位移量δx,在稳态分析(加速度为常数)的条件下,位移量δx与加速度呈线性关系,且由斜率可知机械灵敏度s1=0.1μm/g。如图6所示,为了以较高的光学灵敏度检测耦合区域的输出光功率,选取图中耦合效率随重叠长度变化斜率最大的一段,由式(2)的关系,通过坐标变换,将横坐标由弯曲硅纳米线2、输出硅纳米线3的重叠长度l
out
转换为相对位移量x,通过线性拟合这段函数,得到r2=0.9728,线性度良好,光学灵敏度约为0.23/μm(耦合效率每微米)。设计弯曲硅纳米线2弯曲部分半径为50μm,波导的弯曲损耗可以忽略不计。使用功率为10mw的泵浦光源,经过透镜8聚焦和输入硅纳米线1、弯曲硅纳米线2的疏逝耦合,经计算,耦合区域的输入功率为4.14mw,故耦合区域检测结构的光学灵敏度s2=0.95mw/μm。由式(3)可知,系统灵敏度s=0.095mw/g。假设使用光电转换灵敏度为2
×
105v/w、分辨率为20nw的光电探测器,此时可得加速度计的灵敏度为19v/g,分辨率为210.53μg。假设输入加速度大小为5g,此时,质量块位移量为5g
×
0.1μm/g=0.5μm,探测器检测到的光强为0.5μm
×
0.95mw/μm=0.475mw。
62.其中,为了以较高的光学灵敏度检测耦合区域的输出光功率,选取图6中耦合效率随重叠长度变化斜率最大的一段,即l=2.42μm至l=4.83μm之间,操作点应固定在这个近线性范围的中间,故设计弯曲硅纳米线2、输出硅纳米线3的初始重叠长度l
in
=3.625μm,量程为
±
1.205μm。由于光学检测量程为
±
1.205μm,根据加速度计检测主体的机械灵敏度s1=0.1μm/g计算可得,其可检测的加速度量程为
±
12.05g。向加速度计输入最大加速度12.05g,通过力学仿真可得此时结构体的最大应力为4.38mpa,远小于硅材料的弯曲强度70mpa,故加速度量程至少为
±
12.05g。
63.综上所述,案例所述加速度计灵敏度为19v/g,其中机械灵敏度为0.1μm/g,光学灵敏度为0.95mw/μm,分辨率为210.53μg。
64.上面仅对本发明的较佳实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化,各种变化均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1