基于激光超声SAFT缺陷检测的优化方法及系统
本发明属于激光超声检测,具体涉及一种基于激光超声saft缺陷检测的优化方法及系统。
背景技术:
1、激光超声是一种非接触,高精度,无损伤的新型超声检测技术,利用激光脉冲在被检测工件中激发超声波,并用激光束探测超声波的传播,从而获取工件的缺陷。因其具有的无损伤和光学检测非接触等优点,被广泛应用于无损检测领域。
2、saft是超声成像领域里的一项新的信号处理技术,用于激光无损无损检测中,是超声检测的一种重要的辅助技术手段。激光在被探测物表面发射脉冲激光,时域saft算法主要针对多普勒测振仪在检测点处接收激发产生的缺陷超声回波信号,将信号在每一个检测点位置处获得的回波信号进行延时叠加处理,作为缺陷处的成像数据。
3、在现有的激光超声实验中,检测点接收到的超声信号包含被检测工件的全部超声波信号,其主要可分为入射波信号和反射波信号。而saft成像主要根据反射波信号作为其成像依据,对于某些固定的成像区域(一般在激发点和检测点附近的区域)会由于入射波的相对幅值较大而产生伪像。在现有的时域saft中,由于没有去除入射波的干扰以及对反射波之外的其他波形的优化,伪像无法完全去除并且缺陷处成像分辨率不高,所以整体成像质量难以提高。
技术实现思路
1、为了克服现有技术的不足,本发明提出一种基于激光超声saft缺陷检测的优化方法及系统。
2、实现本发明目的的技术解决方案为:
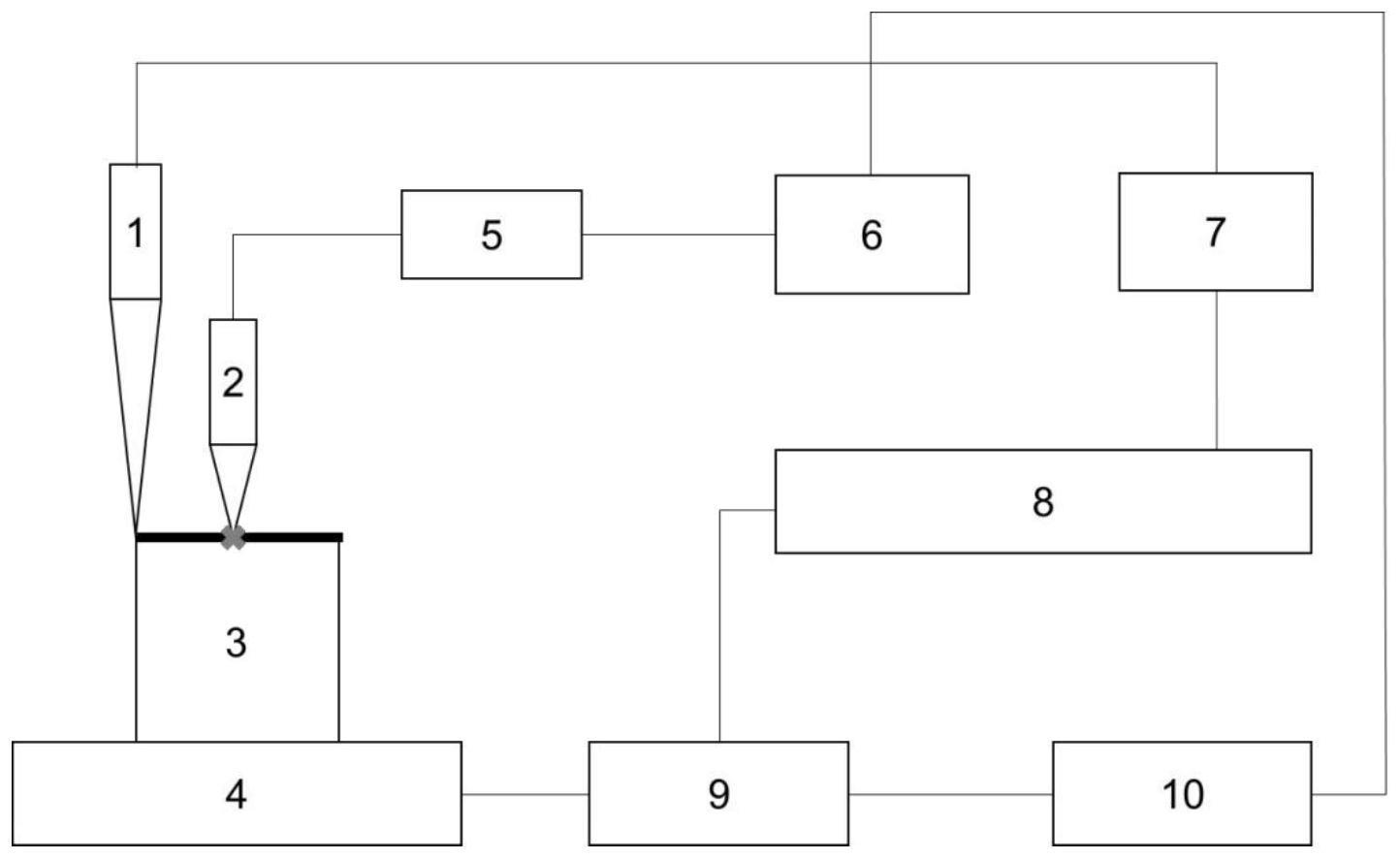
3、一种基于激光超声saft缺陷检测的优化系统,包括测振仪探头、脉冲激光发射探头、样品三维平移台、振镜扫描系统、激光器、多普勒测振仪、设备三维平移台、电机和pc控制台,
4、所述测振仪探头和多普勒测振仪组成干涉仪,多普勒测振仪能够发出连续激光作为探测光,脉冲激光发射探头用于输出高斯脉冲激光,样品三维平移台能够移动从而改变被检测工件的三维位置,振镜扫描系统包括两个轴向相互垂直的振镜,用于控制脉冲激光发射探头在互相垂直的两个平移方向上移动,设备三维平移台能够移动从而改变测振仪探头的水平方向的移动,步进电机用于驱动样品三维平移台和设备三维平移台,pc控制台用于控制激光器、步进电机和采集处理数据。
5、进一步地,所述激光器采用调q激光。
6、进一步地,所述激光器的工作波长为1064nm,脉宽为2.5ns,能量为2.6mj。
7、进一步地,普勒测振仪能够发出波长532nm、光斑半径为0.5mm的连续激光作为探测光。
8、进一步地,被检测工件为平面或者曲面金属材质。
9、根据上述的基于激光超声saft缺陷检测的优化系统的检测方法,包括以下步骤:
10、步骤1、根据检测点的步长选择光斑半径,激光器发射脉冲激光经过振镜扫描系统输出至脉冲激光发射探头到被检测工件表面预设的激发位置;
11、步骤2、步进电机控制样品三维平移台在竖直方向上移动从而使被检测工件表面位于激光焦点处;
12、步骤3、规划检测点移动路径和确定检测点的移动步长,通过步进电机控制设备三维平移台使得多普勒测振仪的测振仪探头处于预设检测点的位置;
13、步骤4、激光器工作,发射脉冲激光,同时多普勒测振仪将接收到的超声波数据送至pc控制台处理;
14、步骤5、不改变激光焦点和检测点的位置,重复多次地发射脉冲激光,同时pc控制台对多次得到的超声波数据求平均,作为第一个检测点数据s1(n);
15、步骤6、沿规划检测路径和检测点步长选择第二个检测点,pc控制台驱动步进电控制设备平移台,使普勒测振仪的测振仪探头平移至第二个检测点的位置,重复步骤5,得到第二个检测点数据s2(n);
16、步骤7、pc控制台对第一个检测点数据s1(n)和第二个检测点数据s2(n)分别自归一化得到信号s1norm(n)和s2norm(n)后,进行互相关匹配;
17、步骤8、saft成像:将被检测工件的二维截面中所有的点作为成像点,获取全部成像点的成像数据,根据反射波的波速,计算由检测点与成像点和激光焦点与成像点的距离之和所决定的时间点t1,在得到的信号δs1(n)中取对应反射波时间点t1的数值δs1(t1),作为成像点的数据,对所有的成像点计算即可得到全部成像点的成像数据;
18、步骤9、重复步骤6至步骤8,直至所有检测点检测完毕,将每一个检测点的差值数据δsinorm(n)(i=1......m-1)作为saft成像数据,m为规划检测点的数量,总共得到m-1个检测点的差值数据,将所有m-1个成像数据叠加,得到最终得到被检测工件saft成像图。
19、进一步地,所述步骤7具体包括:
20、首先定义l为信号s2norm(n)相对信号s1norm(n)的时移,l的模为延时时间大小,而l的正负则代表了时移方向,当l≥0时,其互相关函数为n为每个检测点数据的总长度,r是关于l的函数,r取得最大值时,两检测点数据达到最佳互相关匹配点,此时l=lrmax,lrmax为两检测点数据匹配的最优时移点,匹配完成,δs1(n)=s1norm(n)-s2norm(n+lrmax);当l<0时,则δs1(n)=s1norm(n-lrmax)-s2norm(n),其中n取1到n-|lrmax|
21、本发明与现有技术相比,其显著优点在于:
22、本发明可以不需要对理想样品情况探讨而直接应用实际样品的进行实验,对传统的有无缺陷实验成像的检测方法下明显提高了效率,克服了传统激光超声实验中时域saft伪像无法去除以及成像质量不高的缺点,本优化方案不仅去除了大部分伪像,并提高了缺陷处的成像分辨率。
技术特征:
1.一种基于激光超声saft缺陷检测的优化系统,其特征在于,包括测振仪探头(1)、脉冲激光发射探头(2)、样品三维平移台(4)、振镜扫描系统(5)、激光器(6)、多普勒测振仪(7)、设备三维平移台(8)、电机(9)和pc控制台(10),
2.根据权利要求1所述的基于激光超声saft缺陷检测的优化系统,其特征在于,所述激光器(6)采用调q激光。
3.根据权利要求2所述的基于激光超声saft缺陷检测的优化系统,其特征在于,所述激光器(6)的工作波长为1064nm,脉宽为2.5ns,能量为2.6mj。
4.根据权利要求1所述的基于激光超声saft缺陷检测的优化系统,其特征在于,普勒测振仪(7)能够发出波长532nm、光斑半径为0.5mm的连续激光作为探测光。
5.根据权利要求1所述的基于激光超声saft缺陷检测的优化系统,其特征在于,被检测工件(3)为平面或者曲面金属材质。
6.根据权利要求1-5任一项所述的基于激光超声saft缺陷检测的优化系统的检测方法,其特征在于,包括以下步骤:
7.根据权利要求6所述的基于激光超声saft缺陷检测的优化系统的检测方法,其特征在于,所述步骤7具体包括:
技术总结
本发明涉及一种基于激光超声SAFT缺陷检测的优化方法及系统,根据相近检测点信号的相似性,对多普勒探测仪在相近检测点所接收的超声信号分别自归一化,再基于超声信号之间的互相关匹配定位延时时间点,将检测点数据依据延时时间点作差以降低入射波的干扰和突出回波信号幅值,最后针对所有检测点的差值数据应用时域SAFT算法成像。本发明具有以下优点:1.避免了传统SAFT算法中由于信号入射波的干扰而产生的伪像,突出了缺陷处成像的质量,提高了整体结构的成像质量,2.降低了数据的冗余性,提高成像质量的同时只需一次实时实验采集即可完成对整个结构的成像。
技术研发人员:陆健,雷港华,张宏超
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!