激光诱导等离子体光谱的脉冲激光自动对焦装置及方法
1.本发明属于激光诱导等离子体光谱检测领域,特别是一种用于激光诱导等离子体光谱的脉冲激光自动对焦装置及方法。
背景技术:
2.在气候变暖、“碳达峰、碳中和”的全球背景下,电力系统的低碳化、绿色化升级势在必行。目前,sf6断路器因其优异的绝缘性能和灭弧性能在110kv及以上电压等级的电力系统中的地位无可替代。但sf6是一种温室气体,其单分子的温室效应是co2的23900倍,是《京都议定书》明确规定的需要严格限制排放的六种温室气体之一;因此,寻找一种可以替代sf6的绿色绝缘气体或者一种可以替代sf6断路器的绿色无污染的断路器成了研究人员对电力系统进行绿色化升级的重点研究方向。真空断路器是一种将真空作为绝缘介质的断路器,天然具有绿色无污染的优点,而且具有故障率、维修简单、开断能力强等优点,是sf6断路器的理想替代者。但是目前缺乏对高压真空断路器进行真空度在线检测的有效手段,大大限制了126kv输电等级真空断路器的大规模推广。基于激光诱导等离子体的真空开关真空度检测技术有望实现真空开关的在线检测,其原理是来源于libs技术,即激光诱导等离子体击穿光谱,利用高能纳秒脉冲激光轰击真空开关屏蔽罩,诱导产生激光等离子体,通过采集分析激光等离子体信息,提取等离子体特征参量,根据特征参量得到真空度信息。但是,激光诱导等离子体是一个十分复杂的过程,受脉冲激光聚焦位置的影响;同时,在实际工况下,真空灭弧室被封装在gis内部极弱光环境下,无法确切知道屏蔽罩与gis外壳的距离,难以将脉冲激光聚焦在真空灭弧室的屏蔽罩上,这大大限制了基于激光诱导等离子体的真空开关真空度检测技术的实际使用,也制约了真空开关断路器在高压、特高压输电等级电网中的大规模使用。
3.在背景技术部分中公开的上述信息仅仅用于增强对本发明背景的理解,因此可能包含不构成在本国中本领域普通技术人员公知的现有技术的信息。
技术实现要素:
4.针对现有技术中存在问题,本发明提出一种用于激光诱导等离子体光谱的脉冲激光自动对焦装置及方法,解决现有技术无法实现脉冲激光准确聚焦于弱光甚至无光环境下未知准确距离的靶材上的问题。
5.本发明的目的是通过以下技术方案予以实现,一种用于激光诱导等离子体光谱的脉冲激光自动对焦装置包括,
6.脉冲激光器,其生成激光诱导等离子体光谱的脉冲激光,
7.连续可见光激光器,其生成连续可见激光,
8.第一二向色镜,其分别接收所述脉冲激光和连续可见激光,
9.第二二向色镜,其间隔所述第一二向色镜设置以接收来自第一二向色镜的脉冲激光和连续可见激光,
10.聚焦透镜,其间隔所述第二二向色镜设置以接收来自第二二向色镜的脉冲激光和连续可见激光,聚焦透镜支承且经由驱动装置调节处于不同透镜位置,
11.靶材,其间隔所述聚焦透镜以接收来自聚焦透镜的脉冲激光和连续可见激光,连续可见激光在所述靶材上形成聚焦光斑,其中,脉冲激光器、第一二向色镜、第二二向色镜、聚焦透镜和靶材构成脉冲激光的libs光路,连续可见光激光器、第一二向色镜、第二二向色镜、聚焦透镜和靶材构成连续可见激光的聚焦光路,
12.成像设备,其朝向所述第二二向色镜以采集所述聚焦透镜在不同透镜位置处的所述聚焦光斑图像,靶材、聚焦透镜、第二二向色镜和成像设备构成聚焦光斑的图像采集光路,
13.控制器,其连接所述驱动装置和成像设备,其基于所述述聚焦光斑图像提取聚焦光斑面积,且基于聚焦光斑面积与透镜位置生成聚焦光斑面积最小值对应的透镜位置。
14.用于激光诱导等离子体光谱的脉冲激光自动对焦装置中,聚焦透镜搭载在根据控制信号进行步进操作的驱动装置上,通过驱动装置的步进操作改变位置。
15.用于激光诱导等离子体光谱的脉冲激光自动对焦装置中,所述控制器包括曲线拟合模块,拟合所述聚焦光斑面积与透镜位置以生成拟合曲线,控制器基于拟合曲线得到在透镜位置范围内光斑面积最小值对应的透镜位置。
16.用于激光诱导等离子体光谱的脉冲激光自动对焦装置中,所述驱动装置包括用于步进驱动的步进电机。
17.用于激光诱导等离子体光谱的脉冲激光自动对焦装置中,第一二向色镜、第二二向色镜是长波通二向色镜;其中第二二向色镜是中间开孔型二向色镜,供连续可见激光透过,当连续可见激光强度足够强,可以透过第二二向色镜并在靶材上形成明显聚焦光斑时,第二二向色镜用非开孔二向色镜替代。
18.用于激光诱导等离子体光谱的脉冲激光自动对焦装置中,所述第二二向色镜是透过连续可见激光的中间开孔型二向色镜。
19.一种利用所述的用于激光诱导等离子体光谱的脉冲激光自动对焦装置的对焦方法包括以下步骤:
20.脉冲激光器、第一二向色镜、第二二向色镜、聚焦透镜和靶材构成脉冲激光的libs光路,连续可见光激光器、第一二向色镜、第二二向色镜、聚焦透镜和靶材构成连续可见激光的聚焦光路,
21.将连续可见激光引入libs光路后进行自动对焦,控制器发送复位命令给搭载聚焦透镜的驱动装置,驱动装置回到初始位置后,控制器发送控制信号给驱动装置以进行步进操作,
22.靶材、聚焦透镜、第二二向色镜和成像设备构成聚焦光斑的图像采集光路,控制器控制成像设备采集聚焦光斑图像,提取聚焦光斑面积并保存聚焦光斑面积数据与透镜位置数据;在完成图像采集后,步进电机反馈是否已步进至最大行程处,如果未步进至最大行程处,则驱动装置、进行下一步步进操作;如果已步进至最大行程处,结束步进操作,
23.控制器曲线拟合聚焦光斑面积和对应的透镜位置以求解在透镜位置范围内聚焦光斑面积最小值对应的透镜位置,其作为libs光路聚焦时透镜所在位置,驱动装置驱动聚焦透步进至所述libs光路聚焦时透镜所在位置以完成libs光路的自动对焦。
24.有益效果
25.本发明通过光斑面积与透镜位置的函数确定脉冲激光聚焦时的透镜位置,可以实现libs光路自动对焦;通过在libs光路中引入连续可见激光替代不可见的或者不连续的脉冲激光进行光路对焦,可将libs光路中的脉冲激光聚焦于弱光甚至无光环境下的靶材表面;可将libs光路中的脉冲激光聚焦于未知确切位置的靶材表面;可用于基于激光诱导等离子体的真空开关真空度检测技术的实际测量,将脉冲激光自动对焦于封闭的gis内部屏蔽罩表面上。
26.上述说明仅是本发明技术方案的概述,为了能够使得本发明的技术手段更加清楚明白,达到本领域技术人员可依照说明书的内容予以实施的程度,并且为了能够让本发明的上述和其它目的、特征和优点能够更明显易懂,下面以本发明的具体实施方式进行举例说明。
附图说明
27.通过阅读下文优选的具体实施方式中的详细描述,本发明各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。说明书附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。显而易见地,下面描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。而且在整个附图中,用相同的附图标记表示相同的部件。
28.在附图中:
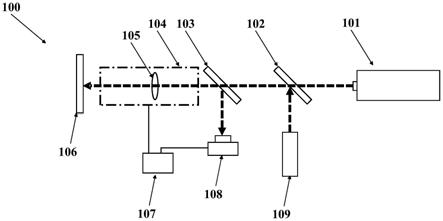
29.图1为本发明用于激光诱导等离子体光谱的脉冲激光自动对焦装置的光路示意图;
30.图2为本发明用于激光诱导等离子体光谱的脉冲激光自动对焦装置的对焦方法的流程示意图;
31.图3为本发明用于激光诱导等离子体光谱的脉冲激光自动对焦装置的连续可见激光聚焦光斑的图像示意图;
32.图4为本发明用于激光诱导等离子体光谱的脉冲激光自动对焦装置的光斑面积与透镜位置的数据图及其曲线拟合图;
33.图5为本发明较佳实施例中,同一位置十次测量的结果分布图;
34.附图标记如下:101-脉冲激光器;102-第一二向色镜;103-第二二向色镜;104-驱动装置;105-聚焦透镜;106-靶材;107-控制器;108-成像设备;109-连续可见光激光器。
35.以下结合附图和实施例对本发明作进一步的解释。
具体实施方式
36.下面将参照附图图1至图5更详细地描述本发明的具体实施例。虽然附图中显示了本发明的具体实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
37.需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利
要求并不以名词的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本发明的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本发明的范围。本发明的保护范围当视所附权利要求所界定者为准。
38.为便于对本发明实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且各个附图并不构成对本发明实施例的限定。
39.如图1所示,用于激光诱导等离子体光谱的脉冲激光自动对焦装置包括:脉冲激光器101,其生成激光诱导等离子体光谱的脉冲激光,
40.连续可见光激光器109,其生成连续可见激光,
41.第一二向色镜102,其分别接收所述脉冲激光和连续可见激光,
42.第二二向色镜103,其间隔所述第一二向色镜102设置以接收来自第一二向色镜102的脉冲激光和连续可见激光,
43.聚焦透镜105,其间隔所述第二二向色镜103设置以接收来自第二二向色镜103的脉冲激光和连续可见激光,聚焦透镜105支承且经由驱动装置104调节处于不同透镜位置,
44.靶材106,其间隔所述聚焦透镜105以接收来自聚焦透镜105的脉冲激光和连续可见激光,连续可见激光在所述靶材106上形成聚焦光斑,其中,脉冲激光器101、第一二向色镜102、第二二向色镜103、聚焦透镜105和靶材106构成脉冲激光的libs光路,连续可见光激光器109、第一二向色镜102、第二二向色镜103、聚焦透镜105和靶材106构成连续可见激光的聚焦光路,
45.成像设备108,其朝向所述第二二向色镜103以采集所述聚焦透镜105在不同透镜位置处的所述聚焦光斑图像,靶材106、聚焦透镜105、第二二向色镜103和成像设备108构成聚焦光斑的图像采集光路,
46.控制器107,其连接所述驱动装置104和成像设备108,其基于聚焦光斑图像提取聚焦光斑面积,基于所述聚焦光斑面积与透镜位置生成聚焦光斑面积最小值对应的透镜位置。
47.用于激光诱导等离子体光谱的脉冲激光自动对焦装置的优选实施例中,所述控制器107基于所述聚焦光斑面积发出控制信号到所述驱动装置104以调节透镜位置。
48.用于激光诱导等离子体光谱的脉冲激光自动对焦装置的优选实施例中,所述控制器107包括曲线拟合模块,其曲线拟合所述聚焦光斑面积与透镜位置以生成拟合曲线,控制器107基于拟合曲线得到在透镜位置范围内光斑面积最小值对应的透镜位置。
49.用于激光诱导等离子体光谱的脉冲激光自动对焦装置的优选实施例中,所述驱动装置104包括用于步进驱动的步进电机。
50.用于激光诱导等离子体光谱的脉冲激光自动对焦装置的优选实施例中,所述步进电机的步进精度为50um,每次步进距离为1mm。
51.用于激光诱导等离子体光谱的脉冲激光自动对焦装置的优选实施例中,连续可见激光是波长为650nm的红色连续激光,激光功率为100mw。
52.用于激光诱导等离子体光谱的脉冲激光自动对焦装置的优选实施例中,所述第二二向色镜103是透过连续可见激光的中间开孔型二向色镜。
53.用于激光诱导等离子体光谱的脉冲激光自动对焦装置的优选实施例中,所述成像设备108包括iccd相机。
54.用于激光诱导等离子体光谱的脉冲激光自动对焦装置的优选实施例中,所述靶材106为gis内部屏蔽罩表面。
55.在一个实施例中,所述连续可见激光通过第一二向色镜102引入libs光路中,所述可见激光聚焦光斑通过第二二向色镜103从libs光路中分离出来成像,所述聚焦透镜105搭载驱动装置104上,在控制器107的控制下进行步进操作改变透镜位置。
56.在一个实施例中,聚焦透镜105搭载在可以根据控制信号进行步进操作的驱动装置104上,通过驱动装置104的步进操作改变位置;控制驱动装置104以固定距离步进,在驱动装置104步进完成后控制图像采集设备采集可见光斑图像,根据光斑图像提取光斑面积,同时控制驱动装置104进行下一次步进;在步进采集光斑图像结束后,将采集到的可见光斑面积与位置拟合进行曲线拟合,即libs光路聚焦时透镜所在位置。
57.在一个实施例中,第二二向色镜103是长波通二向色镜。
58.在一个实施例中,第二二向色镜103是中间开孔型二向色镜,可供连续可见激光透过,当连续可见激光较强时,第二二向色镜103可用常规非开孔二向色镜替代。
59.如图2所示,一种利用所述的用于激光诱导等离子体光谱的脉冲激光自动对焦装置的对焦方法包括以下步骤:
60.脉冲激光器101、第一二向色镜102、第二二向色镜103、聚焦透镜105和靶材106构成脉冲激光的libs光路,连续可见光激光器109、第一二向色镜102、第二二向色镜103、聚焦透镜105和靶材106构成连续可见激光的聚焦光路,
61.将连续可见激光引入libs光路后进行自动对焦,控制器107发送复位命令给搭载聚焦透镜105的驱动装置104,驱动装置104回到初始位置后,控制器107发送控制信号给驱动装置104以进行步进操作,
62.靶材106、聚焦透镜105、第二二向色镜103和成像设备108构成聚焦光斑的图像采集光路,控制器107控制成像设备108采集聚焦光斑图像,提取聚焦光斑面积并保存聚焦光斑面积数据与透镜位置数据;在完成图像采集后,步进电机反馈是否已步进至最大行程处,如果未步进至最大行程处,则驱动装置104、进行下一步步进操作;如果已步进至最大行程处,结束步进操作,
63.控制器107曲线拟合聚焦光斑面积和对应的透镜位置以求解在透镜位置范围内聚焦光斑面积最小值对应的透镜位置,其作为libs光路聚焦时透镜所在位置,驱动装置104驱动聚焦透步进至所述libs光路聚焦时透镜所在位置以完成libs光路的自动对焦。
64.在一个实施方式中,对焦方法包括:在libs光路中引入可见激光,驱动装置104搭载聚焦透镜105步进改变透镜位置,依次采集各位置处可见光聚焦光斑图像,获得各位置处可见光聚焦光斑面积,将光斑面积与聚焦透镜105位置进行拟合,获取聚焦透镜105位置与光斑面积的函数,求解曲线函数在聚焦透镜105位置范围内光斑面积最小值对应的聚焦透镜105位置,即libs光路聚焦时透镜所在位置,聚焦透镜105运动至求解得到的聚焦位置实现libs技术的光路对焦。
65.本发明核心思想是:在libs光路中引入连续可见激光,替代libs光路中的脉冲激光进行光路对焦,采集聚焦透镜105在不同位置处靶材106上连续可见激光聚焦光斑图像,
根据聚焦光斑图像提取聚焦光斑面积,将光斑面积与透镜位置进行曲线拟合,求解拟合函数在透镜位置范围内光斑面积最小值对应的透镜位置,即即libs光路聚焦时透镜所在位置,聚焦透镜105运动至聚焦位置实现libs光路的脉冲激光自动对焦。参见图1,本发明较佳实施例的光路图。libs光路为:脉冲激光器101-聚焦透镜105-靶材106;连续可见激光聚焦光路为:连续可见激光器109-第一二向色镜102-第二二向色镜103-聚焦透镜105-靶材106;可见光斑成像光路为:靶材106-聚焦透镜105-第二二向色镜103-成像设备108;需要说明的是,第一二向色镜和第二二向色镜是长波通二向色镜,其中第二二向色镜是中间开孔型二向色镜,当连续可见激光较强时,第二二二向色镜可用常规长波通二向色镜替代。
66.参见图2,本发明较佳实施例的流程图。将连续可见激光引入libs光路后,光路开始进行自动对焦,控制器107给搭载聚焦透镜104的驱动装置105发送复位命令,驱动装置105回到初始位置后,控制器107给驱动装置105发送第一步步进操作命令,步进操作结束后,控制器107给成像设备108发送采集可见激光聚焦光斑图像的命令,图像采集完成后输出至控制器107进行图像处理,提取光斑面积并保存光斑面积数据与位置数据;在完成图像采集后,步进台反馈是否已步进至最大行程处;如果未步进至最大行程处,则驱动装置105进行下一步步进操作;如果已步进至最大行程处,结束步进,控制器107将存储的光斑面积和对应的聚焦透镜位置进行曲线拟合,求解曲线在透镜位置范围内最小值时对应的透镜位置,即libs光路聚焦时透镜所在位置,驱动装置105搭载聚焦透镜104步进至对应的透镜位置,完成libs光路的自动对焦。
67.在本发明较佳的实施例中,所用连续可见激光是波长为650nm的红色连续激光,激光功率为100mw;所用第一二向色镜、第二二向色镜都是长波通二向色镜,其中第二二向色镜是中间开孔二向色镜;所用驱动装置是步进精度为50um的高精度步进台,每次步进距离为10mm;所用成像设备时iccd相机;所用控制器是已写好控制、数据处理程序的stm32控制器。本发明较佳的实施例工作方式是:当连续可见激光引入libs光路后,stm32控制器启动自动对焦程序,stm32控制器发送步进台复位命令,搭载聚焦透镜的高精度步进台完成复位后进行第一步步进操作,完成步进操作后,stm32控制器发送命令给iccd相机采集连续可见聚焦光斑图像,stm32控制器对光斑图像进行处理提取光斑面积,存储光斑面积和对应的透镜位置数据;图像采集结束后,步进台反馈是否处于最大行程处;如果否,则进行下一步步进操作;如果是,则stm32控制器对光斑面积数据和透镜位置数据进行曲线拟合处理,求解拟合曲线函数在透镜位置范围内最小值所对应的透镜位置,即libs光路聚焦时透镜所在位置,步进台搭载聚焦透镜在stm32控制的命令下步进至求解得到透镜位置,完成libs光路对焦。
68.参见图3,本发明较佳实施例中获得的不同位置处可见光聚焦光斑图,图中各光斑图像左上角表示透镜所在位置,聚焦光斑面积随聚焦透镜的位置变化先变小,后变大。依据本实施例可见激光聚焦光斑图像,获得的各位置聚焦光斑面积。
69.参见图4,本发明较佳实施例中获得的各位置处聚焦光斑面积,其中纵坐标表示光斑面积,即像素点数,横坐标表示透镜位置,黑色数据点表示该位置处聚焦光斑面积,黑色实线表示数据点的曲线拟合情况,拟合系数r2达到了0.99382,有非常高的拟合度;求解透镜位置范围内的拟合曲线最小值对应的透镜位置,即libs光路聚焦时透镜所在位置,得到光斑面积为最小值时透镜位置为122.447mm。
70.参见图5,本发明较佳实施例中,同一位置十次测量结果分布图,图中纵坐标表示透镜距离,横坐标表示测量次数,从图中可以发现十次结果分布在122.0-122.5mm之间,根据正态分布的3δ原则,测量结果的-3δ~3δ区间为121.8395-122.6411mm,说明本发明测量结果具有很高的稳定性,结果误差在1mm之内。
71.尽管以上结合附图对本发明的实施方案进行了描述,但本发明并不局限于上述的具体实施方案和应用领域,上述的具体实施方案仅仅是示意性的、指导性的,而不是限制性的。本领域的普通技术人员在本说明书的启示下和在不脱离本发明权利要求所保护的范围的情况下,还可以做出很多种的形式,这些均属于本发明保护之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1